Pololu Blog »
Pololu Blog (Page 85)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Self-balancing robot
 |
This self-balancing by Sebastian Nilsson robot uses a 37D metal gearmotor with encoder and a pair of Pololu 90×10mm wheels.
Featured link: http://sebastiannilsson.com/en/k/projekt/selfbalancing-robot/
Pi Trak
 |
This Raspberry Pi-based robot’s motors are driven with a TB6612FNG motor driver carrier.
Featured link: https://projects.drogon.net/adafruit-protoplate-for-the-rasbperry-pi/
PsychoRowRow
This group of robots by Brian Patton features a Maestro 24 controlling 22 servos to create a rendition of Row Row Row Your Boat.
Featured link: http://www.youtube.com/watch?v=uF5MCNPWZ5g
LightRobot
The LightRobot is a 3pi Robot that has been modified with RGB LEDs, an RN-41 Bluetooth module, and a sonar range finder that is controlled with voice commands and the accelerometer from an Android phone. The source code for the robot and the Android app are also available on the project’s GitHub page.
Featured link: http://www.youtube.com/watch?v=hJi5qhOgbXw
Textspresso text-enabled espresso machine
 |
This text-enabled espresso machine uses the Zipwhip app to receive a text message for an order of espresso. An A4988 stepper motor driver carrier and servo are then used to rotate the cup up to the nozzles where the espresso is dispensed.
Related products

Heatsinking an A4988/A4983 stepper motor driver carrier
 |
This blog post is a very detailed writeup of some A4988 stepper motor driver heatsinking experiments.
Featured link: http://arduinodabbler.wordpress.com/2012/07/13/heatsinking-a-pololu-a4988-a4983-stepper-driver/
Wixel used with Arbotix Commander V2
 |
This post in the Trossen Robotics Community forum shows a pair of Wixels are added to an Arbotix Commander V2 remote control, allowing it to send its signals to a computer. The author gives us a nice compliment:
Not to be a shill, but that was easier to set up than any MCU + Xbee configuration I’ve seen.
Featured link: http://forums.trossenrobotics.com/showthread.php?5558-Pololu-s-Wixel-Arbotix-Commander-V2
Dalek Robot
This autonomous, obstacle-avoiding robot is controlled by an Arduino and uses two 25D metal gearmotors, which are attached to a dual VNH2SP30 motor driver carrier.
Monitoring power consumption with the ACS715
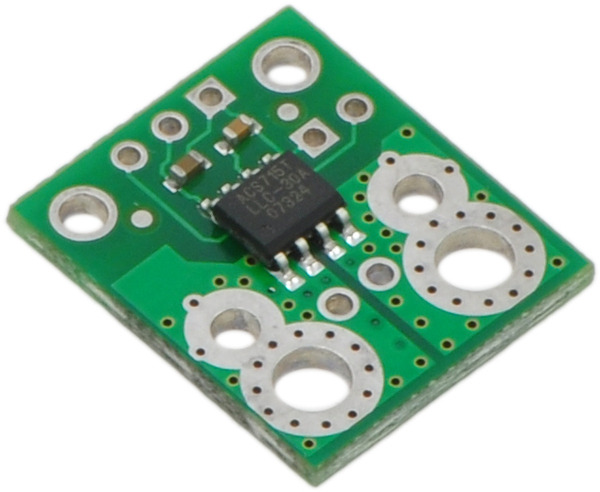 |
This blog post by Steve Spence discusses using an ACS715 Current Sensor Carrier to monitor the current consumption of a ham radio when in emergency communication mode.
Related products

Robotic Arm
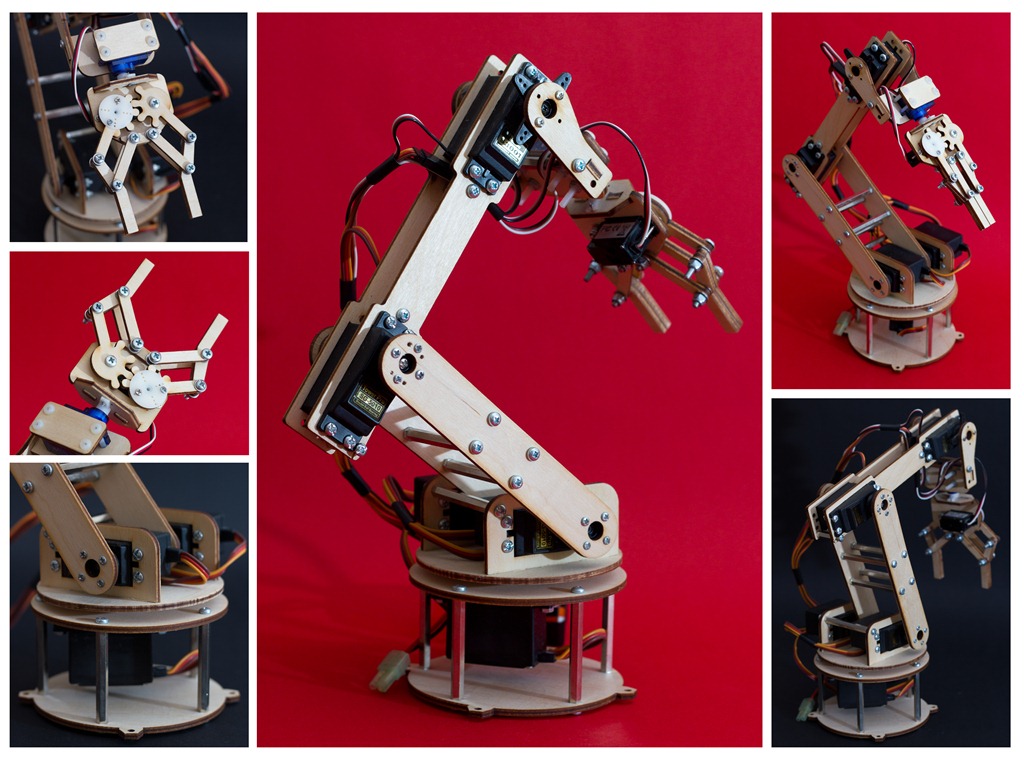 |
This laser-cut robotic arm is controlled by a Mini Maestro servo controller. By Szymon Kobalczyk, April 2012.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










