Pololu Blog »
Pololu Blog (Page 82)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Raspberry Pi-based State Poster Project
 |
Emma, a 2nd grader, put together this creative tri-fold poster of Vermont. She uses the Pololu Step-Down Voltage Regulator and a Pololu Pushbutton Power Switch SV.
Featured link: http://www.swblabs.com/?p=871
LPS331AP pressure sensor test flight

We expect to release a simple carrier for ST’s new LPS331AP pressure sensor this week. While testing and writing example programs for the sensor, one of our engineers, Kevin, came up with a nice demonstration that calculates and displays the altitude on our Orangutan SVP robot controller. It was a beautiful spring day with great flying weather, so Paul and I took Kevin’s digital altimeter on a flight to Lake Havasu City, Arizona, to see how it compared to the altimeter in a plane. Continued…
More fun machines, part 2

I posted toward the end of last year about some new equipment we were adding to our manufacturing operations and said the best stuff was still coming. I and several others at Pololu have since had some more personal deliveries of the crying-all-night sort, which delayed my promised update. I still do not have the performance information I had hoped to have by now, but let’s at least look at what we got: Continued…
Irowe 4550
 |
This fully-autonomous robot can detect and avoid objects, track moving objects, detect table edges, and detect level lights. The robot uses Sharp optical range finders and Pololu wheels.
Featured link: http://forum.pololu.com/viewtopic.php?p=31673#p31673
BumbleBee Autonomous Underwater Vehicle
 |
Congratulations to Team BumbleBee on winning 2nd place in the 2013 Singapore AUV competition! Their autonomous underwater vehicle uses a High-Power Motor Controller 18v15.
Featured link: http://bbauv.com/bumblebee-placed-2nd-in-singapore-autonomous-underwater-vehicle-2013/
Freedom Zumo Robot
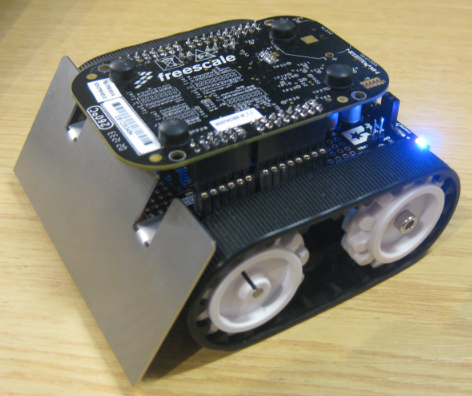 |
This robot uses our Zumo robot kit, 75:1 micro metal gearmotors, and a Zumo reflectance sensor array. Instead of an Arduino it uses a Freescale FRDM-KL25Z as the microcontroller board. Sample code is available for line following and maze solving.
Featured link: http://forum.pololu.com/viewtopic.php?f=29&t=6657
Wixel breakout board for servos
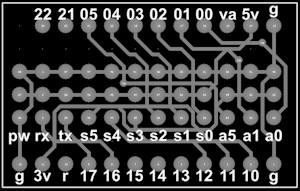 |
This board by Martin Sant makes connecting servos to the Wixel easier.
Featured link: http://martinsant.net/?page_id=962
Replacement motor for the NERF Stryfe
 |
We recently heard that the Solarbotics RM2 is being used as a replacement motor for upgrading flywheel NERF blasters. In this discussion on the NerfHaven Forums, forum member 0reo says:
IMHO, these are the best motors for any flywheel nerf gun that runs on 4 AAs.
Featured link: http://nerfhaven.com/forums/index.php?showtopic=23611
Related products


Pinoccio demo using 3pi: Web Rover
 |
This demo project for the Pinoccio wireless microcontroller combines a Pololu 3pi with a Pinoccio to create a rover that can be driven remotely over the internet.
Featured link: http://pinocc.io/examples/webrover/
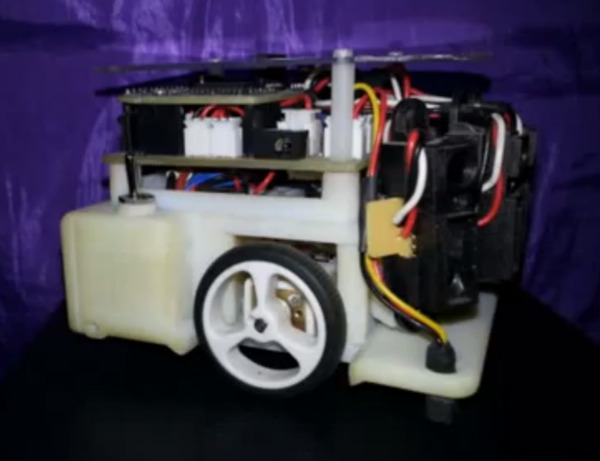
Veter Robot
 |
This nice-looking autonomous robot uses a Dagu Rover 5 Tracked Chassis. The Veter Robot was designed to be used as a robotics research platform. The creators list many advantages of their platform:
In the hardware area we provide:
- Longer autonomous operation time with easy replaceable battery.
- Significantly higher processing power with onboard ARM CPU and advanced TI DSP.
- Easy customizable 3D-printed body for integration of additional sensors and actuators.
- Simple electronic built out of standard high level components.
- Wide range of out-of-the-box sensors.
In the software area we provide:
- Advanced communication infrastructure for cloud robotics.
- Support for multiple programming languages.
- Adaptive video streaming for remote operation over the Internet.
- Set of examples for education scenarios.
By embracing open software and hardware paradigm we and our customers have access to vibrant and large community of developers and designers. By shifting complexity to the software and simplifying hardware we were able to reduce price to very competitive level.
For technical details, demo videos, and purchasing information, see the project web site.
Featured link: http://veterobot.com/


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










