Pololu Blog »
Pololu Blog (Page 78)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Brute Force Car Radio Code Solver
Forum user Christian, writing from Germany, posted this video of an automated system he built that pushes buttons on a car radio (Becker Mexico CD 876) as a brute-force method to determine its radio code. In his system, he uses our Mini Maestro 12-Channel USB Servo Controller and 10 servos to extend rods of wood to press the numbered buttons on the radio console. You can read more about his system in this forum post.
The setup had already run for 3 days straight, but Christian expects it to take another 30 days to finish entering all 10,000 codes. We look forward to hearing back from Christian once it finishes.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7280
Pololu Wixel with SD Card as USB Mass Storage Device
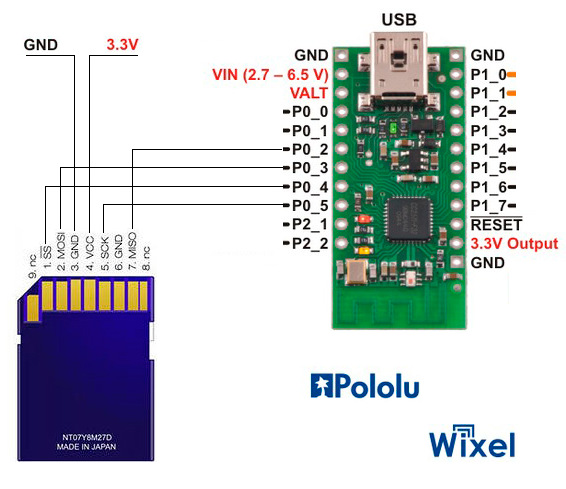 |
Pololu Forum user VolAnd, writing from St. Petersburg, Russia, posted about an app that turns a Wixel into a USB SD card reader. The Wixel identifies itself as a mass storage device, and basic read/write operations are working. His goal is to create files with the Wixel that he can then read from a PC. You can read more or get the app from his forum post.
This Wixel app and many others are available in our listing of community-contributed apps on the forum.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7143
Camera Control and Stabilization via PC
In this video, x-ioTechnologies uses one of our Maestro USB servo controllers with their x-IMU to demonstrate control and stabilization of a 3 DOF camera mount.
Featured link: http://www.youtube.com/watch?v=xjZod2SWvz4
New products: Encoder motors for 25D mm and 37D mm metal gearmotors, without gearboxes
We are now selling the motor and encoder portion of three of our metal gearmotors, without a gearbox. The pinion gear on the output shaft works with the gearboxes on the corresponding products, so these can be used as replacement motors or encoders.
 |
Motor with 48 CPR Encoder for 25D mm Metal Gearmotors (No Gearbox)
|
HP Motor with 48 CPR Encoder for 25D mm HP Metal Gearmotors (No Gearbox)
 |
Motor with 64 CPR Encoder for 37D mm Metal Gearmotors (No Gearbox)
ARM mbed NXP LPC1768 price reduced by $10
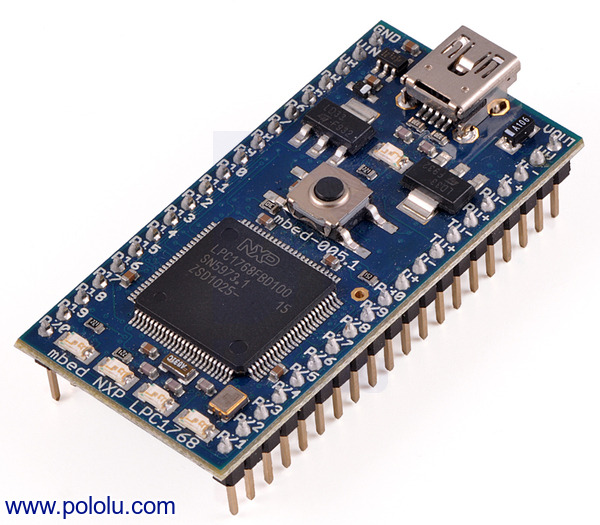 |
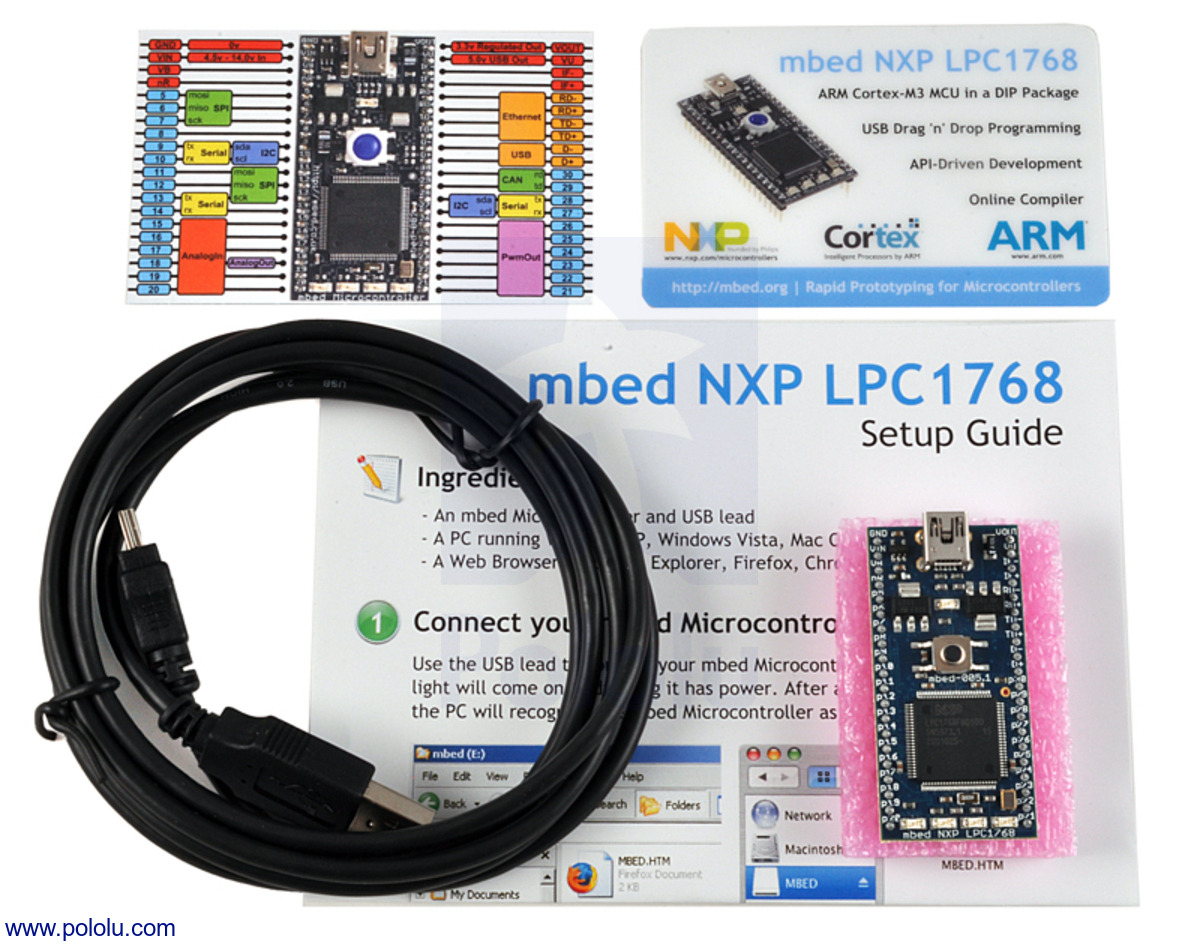
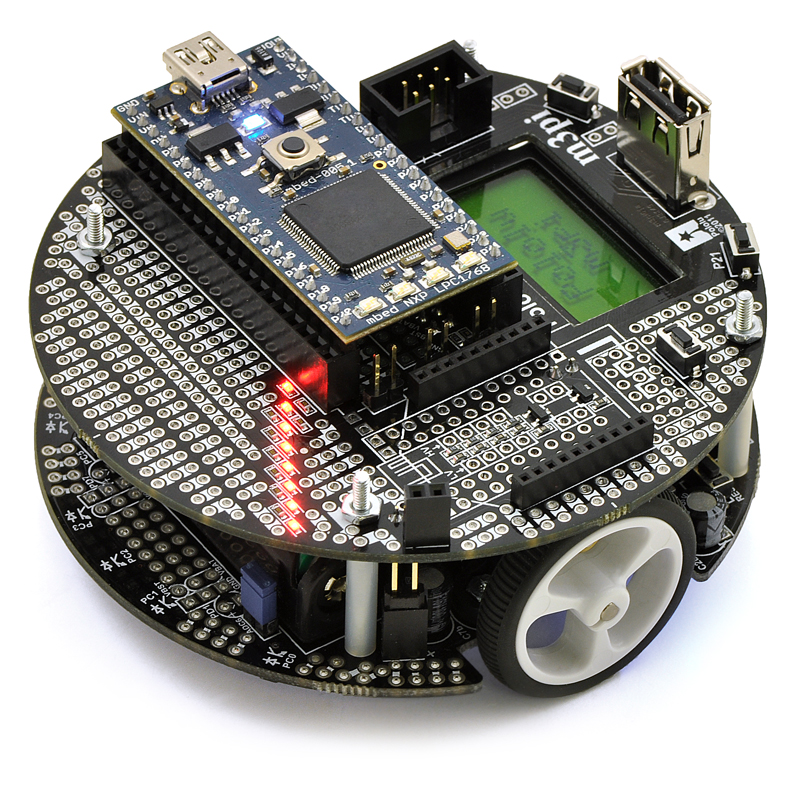
You can now buy the ARM mbed NXP LPC1768 Development Board for just $49, a reduction of $10. We also lowered the price of the m3pi Robot + mbed NXP LPC1768 Development Board Combo by $10, to $189.95.
From the product page:
The mbed NXP LPC1768 is an easy-to-use MCU development board designed for rapid prototyping. At its heart is a powerful 32-bit ARM Cortex-M3 processor running at 96 MHz with 512 KB flash and 32 KB RAM, which makes it far more capable than popular 8-bit prototyping alternatives. A comprehensive firmware library and plenty of sample code help you get your program up and running quickly, and a free online IDE and C++ compiler means that no software installation is required. Downloading programs is as simple as using a USB flash drive (no external programmer is necessary).
|
|
Robotic Car - A Simple Way to Build a Model
In this video, Brian Douglas uses our MinIMU-9 and Zumo Robot to show how to build a control system model for a robotic car without first knowing all of the different internal workings of the car.
Brian hosts a YouTube channel where he uploads various control system videos that are intended to supplement first year classroom instruction. You might also be interested in some of his other videos: This video demonstrates closed loop control of a robotic car, and the videos in this playlist explain how to use a gyro with MATLAB/Simulink and Arduino.
Featured link: http://www.youtube.com/watch?v=th0acX5omRM
Related products



Welcome to the Pololu Blog!
 |
We released our new company blog to the public this week. The Pololu Blog is the main place to find news and announcements about Pololu including new products, price changes and sales, community projects, video releases, and more.
Pololu president Jan Malášek’s blog, Engage Your Brain, which used to occupy this part of the site, is also now part of the Pololu Blog.
Still can’t get enough Pololu? You can also follow us on Facebook, Twitter, and Google+, or subscribe to our YouTube channel.
Joystick App for Wixel now available
 |
We have just released a joystick app for the Wixel that allows you to turn a Wixel connected to a computer into a USB joystick, with the Wixel’s analog and digital inputs representing joystick axes and buttons. The app and its documentation can be found in the Wixel User’s Guide, and its source code has been added to the Wixel SDK.
We’ll soon be publishing a sample project that shows you how to use a Wixel running this app to convert a retro joystick into a USB device, so stay tuned!
Update (12 September 2013): The Wixel USB Joystick sample project is now available.
Related post: Sample project: Wixel USB Joystick
Dual motor drivers for less than $5
As part of our continuing efforts to make better quality products at lower prices, we have dropped the prices on some of our smallest dual motor driver carriers and made the first quantity price breaks at just five units for an even better deal! We hope this will make them more compelling alternatives to old motor drivers like the L293D or SN754410.
 |
Our DRV8835 carrier has dropped from $5.95 to $4.49.
 |
Our DRV8833 carrier has dropped from $6.95 to $4.95.
 |
And finally, our TB6612FNG carrier has dropped from $8.45 to $4.95. This especially steep price reduction is made possible in part by upgrading the TB6612FNG carrier to use a new reverse protection circuit and all ceramic capacitors (which also allow for a lower profile). The new version of the board is pictured to the left, but we are still transitioning from the old version, so you might receive either one until we complete the transition. For pictures of the original board and details on the status of the transition, please visit the product page.
New products: Universal Aluminum Mounting Hubs with M3 holes
 |
Our universal mounting hubs are now available in versions with mounting holes sized for M3 screws (not included). These aluminum hubs allow you to mount custom wheels and mechanisms to 3 mm, 4 mm, 5 mm, and 6 mm shafts. Each set of two hubs includes the required set screws and an Allen wrench for securing the hubs to motor shafts.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










