Pololu Blog »
Pololu Blog (Page 67)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New products: 500mA Step-Down Voltage Regulator D24V5Fx
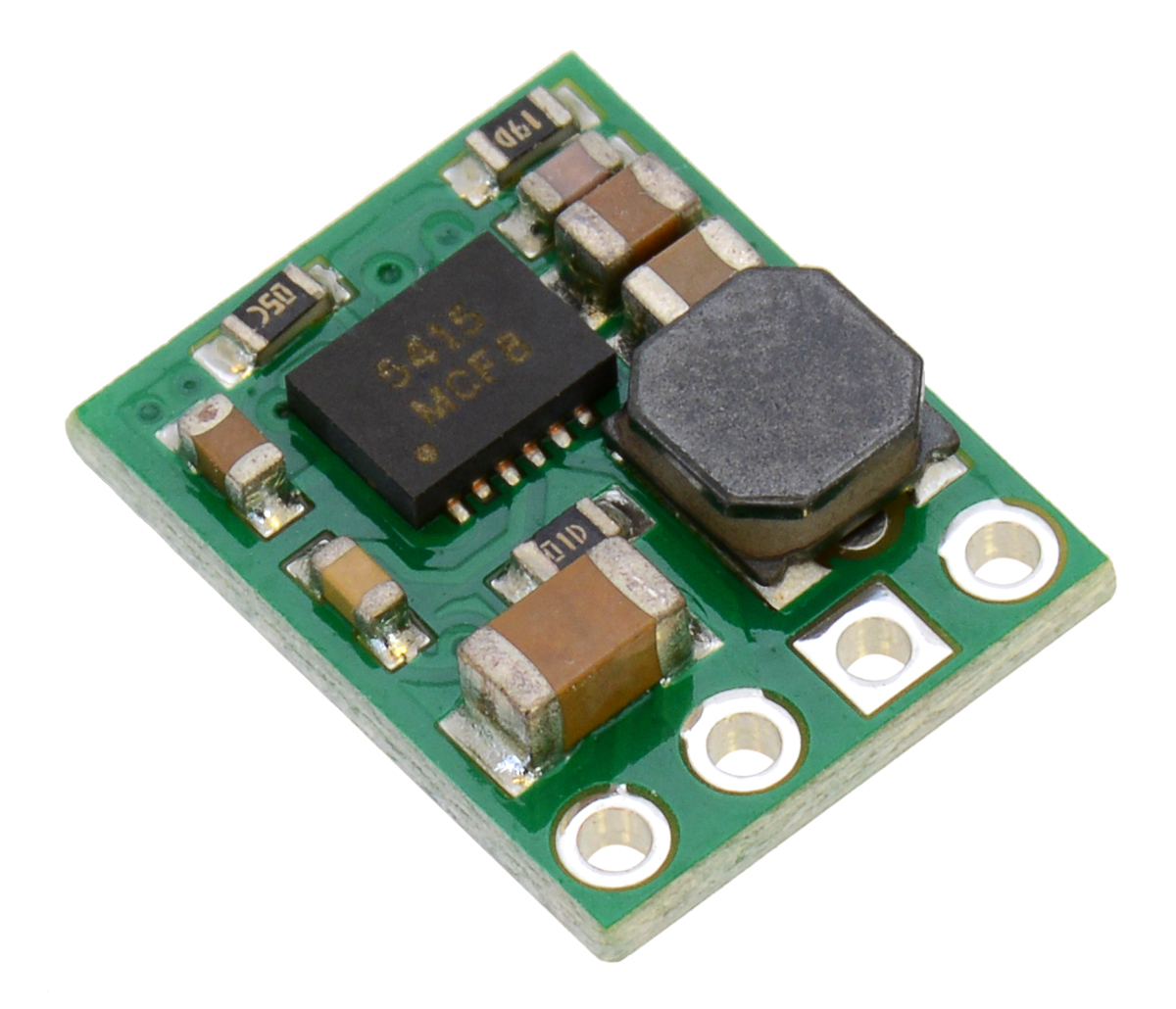 |
We are happy to introduce our D24V5Fx voltage regulator family, a next-generation version of our tiny D24V3Fx and D24V6Fx buck (step-down) regulators, which have been some of our most popular products. These new regulators are synchronous, which results in better efficiency, especially at light loads, and they have much lower dropout voltages (e.g. the 5 V version has just over 1 mV of dropout per mA of output current).
So far we have versions with 3.3 V, 5 V, 9 V, and 12 V outputs, and we will soon be releasing 1.8 V, 2.5 V, and 6 V versions; you can contact us for custom voltages, too. They operate with input voltages up to 36 V and have typical efficiencies of 80% to 93%. These regulators have integrated over-temperature and over-current shutoff, and they reduce their switching frequency from the typical 500 kHz to improve efficiency at light loads, making them well suited for low-power applications that are run from a battery.
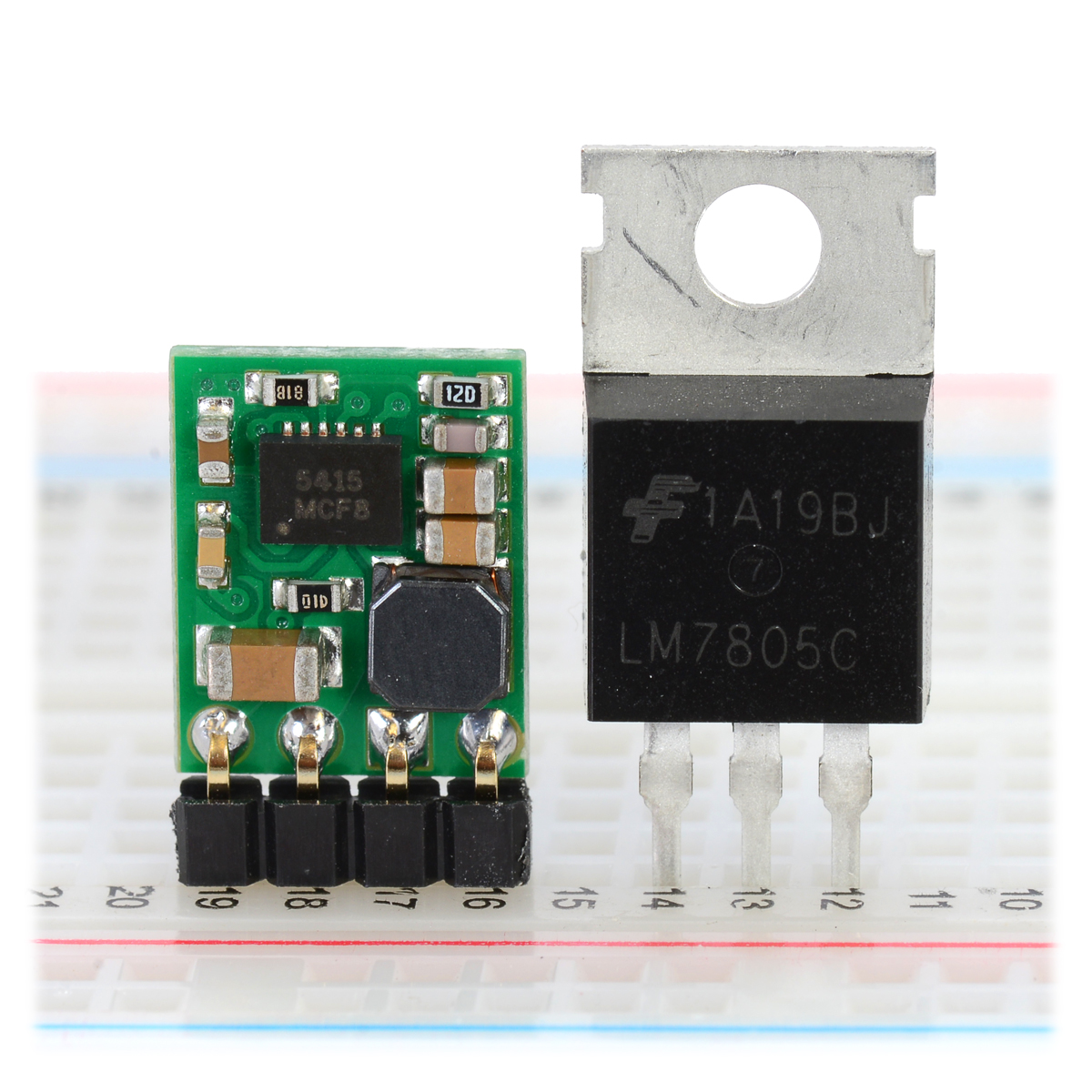
At only 0.5″ × 0.4″ × 0.1″ (13 mm × 10 mm × 3 mm) these buck regulators are also smaller than standard through hole linear regulators with DIP packages. The picture below shows a D24V5Fx next to a 7805 voltage regulator in a TO-220 package.
 |
For other regulator options, you can take a look at our full selection of step-up voltage regulators, step-down voltage regulators, and step-up/step-down voltage regulators.
Related products

New revision of the Dual VNH5019 motor driver shield for Arduino
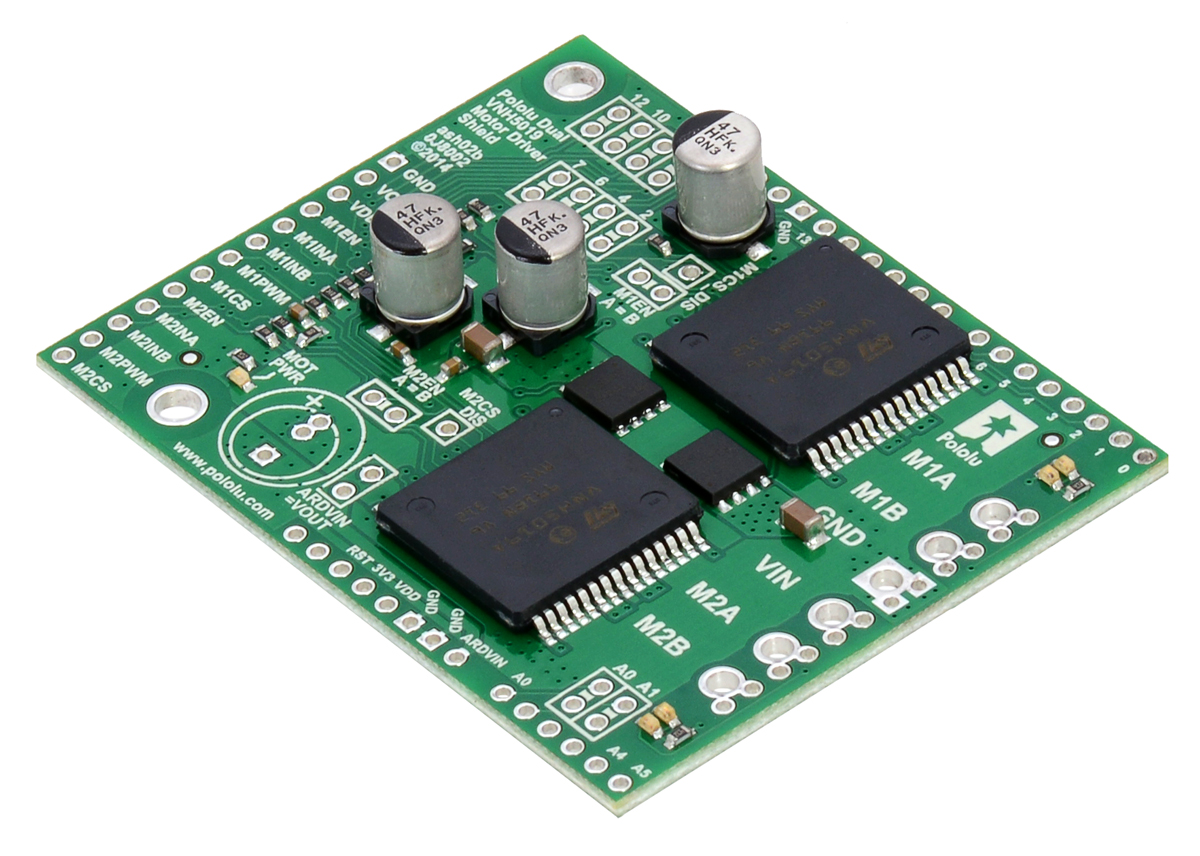 |
We’ve released an updated version of our dual VNH5019 motor driver shield for Arduino. The VNH5019 is a great solution for driving high-power motors, with each chip able to supply up to 12 A continuously at 5.5 V to 24 V. However, the original version of our dual VNH5019 shield was designed before the Arduino Uno R3 was released, so it lacked pass-throughs for the four new pins (SCL, SDA, IOREF, and an unused pin) introduced by the R3 and present on all newer Arduinos. This makes it harder to stack other shields with it, especially ones that make use of the new I²C pin location. The latest board revision adds these pass-throughs to make the shield fully compatible with the Uno R3 pinout.
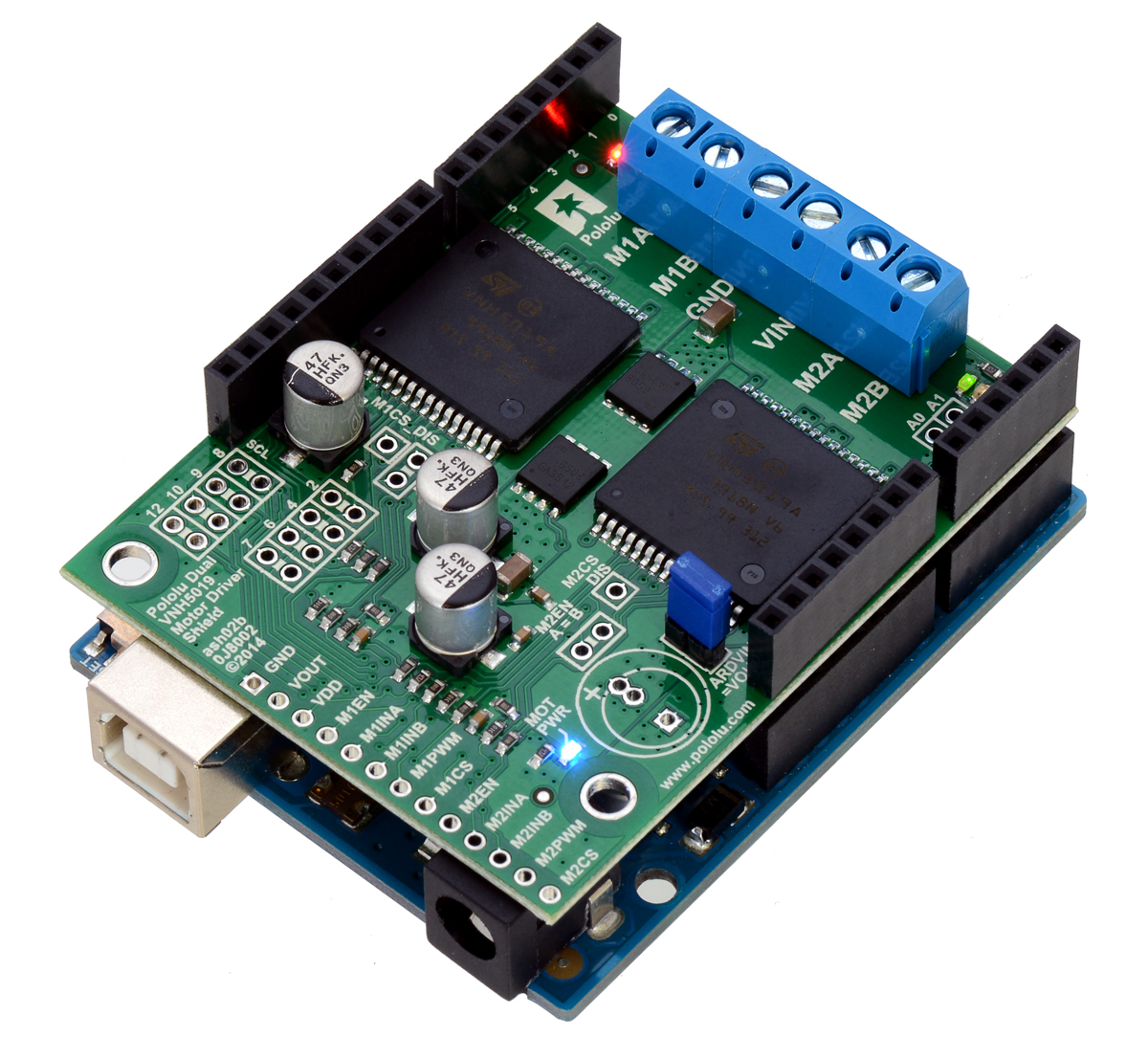 |
For more information, see the dual VNH5019 motor driver shield product page and user’s guide.
Related products


Higher-resolution pictures on the Pololu website
This week we made higher-resolution pictures available throughout the Pololu website. When we overhauled our website back in 2007, 1080p displays were almost unheard of, and we decided to show our pictures at a maximum width of 600 pixels so that they would fit on everyone’s screen. Now, about a quarter of our web visitors have displays that are 1080p or better, and 600 pixels is looking disappointingly small.
It turns out that even though we were not displaying them, we already had many high-resolution pictures in our database. So, just changing the code allows some old pages to get a lot better! For example, this picture of our QTR-8A Reflectance Sensor Array was originally uploaded as a 1000-pixel-wide image – now you can zoom in and try to read the resistor values:
 |
Screenshots were particularly disappointing before, since they are naturally high-resolution. Here is an example, an oscilloscope trace of some LC Voltage Spikes. Click the picture for the full, 1024-pixel-wide image. Note: the image gets resized to fit in the popup window, so you might have to click one more time to zoom in all the way.
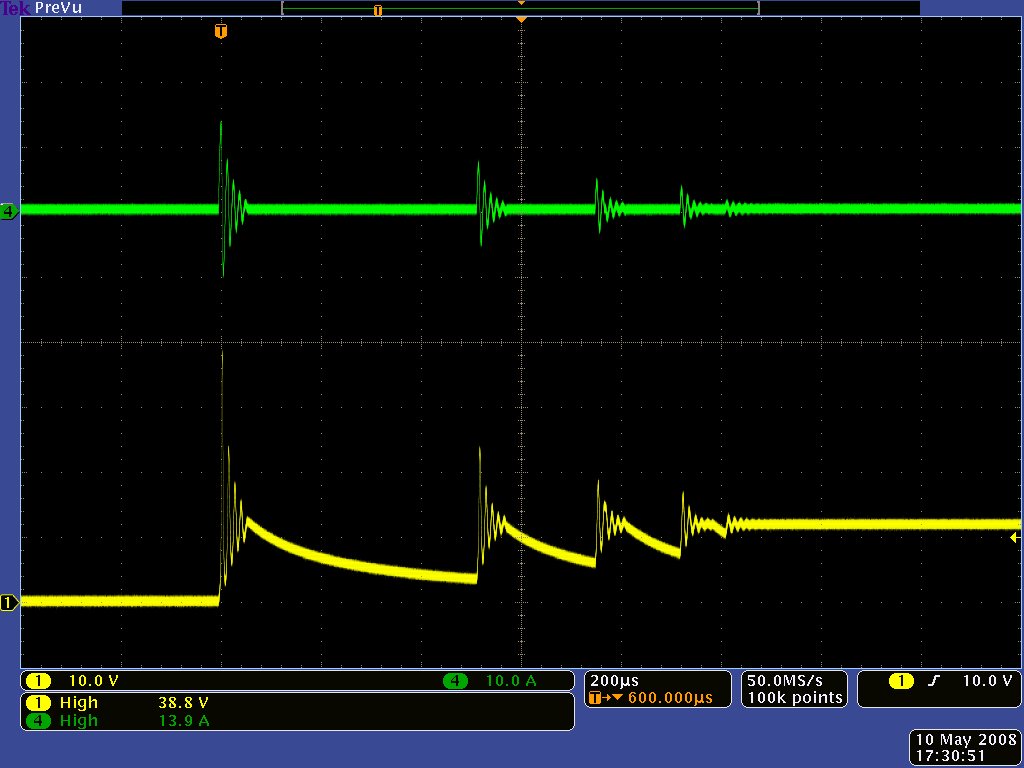 |
We will be gradually adding new higher-resolution pictures, but are there any that you would like us to redo as soon as possible? Any additional views, like the bottom of a board, that you think we are missing? Please post a comment to let us know.
Power Level Indicator for Ghostbusters Proton Gun
Justin Chase Black (Throwing Chicken) is an artist and long-time laser cutting client who uses laser-cut parts in his prop and replica builds. Every time we ship a laser order to him, I eagerly await a new Facebook post showing off his latest project.
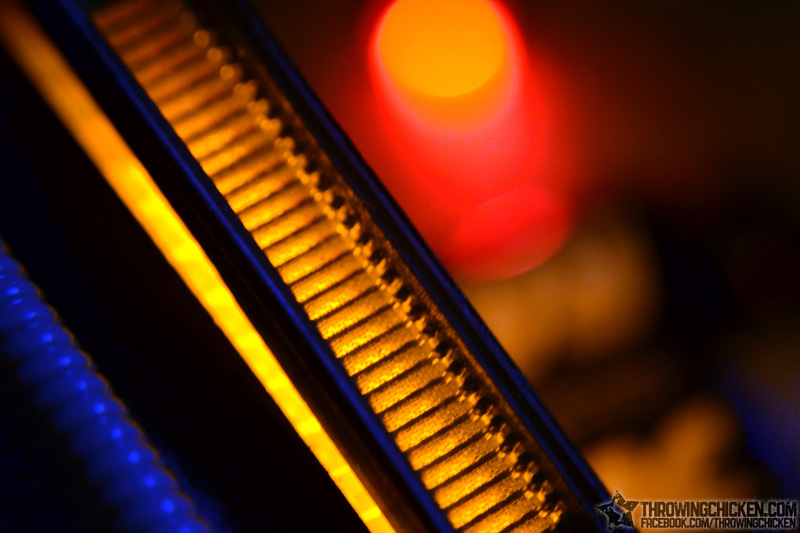
His work is extremely meticulous, skipping no detail in even the tiniest components. One of his more recent projects involves a tiny power level indicator on a “Proton Gun” replica from the movie Ghostbusters. Buying a power level indicator wasn’t an option; the ones he could find were made for aviation and cost over $1,000!
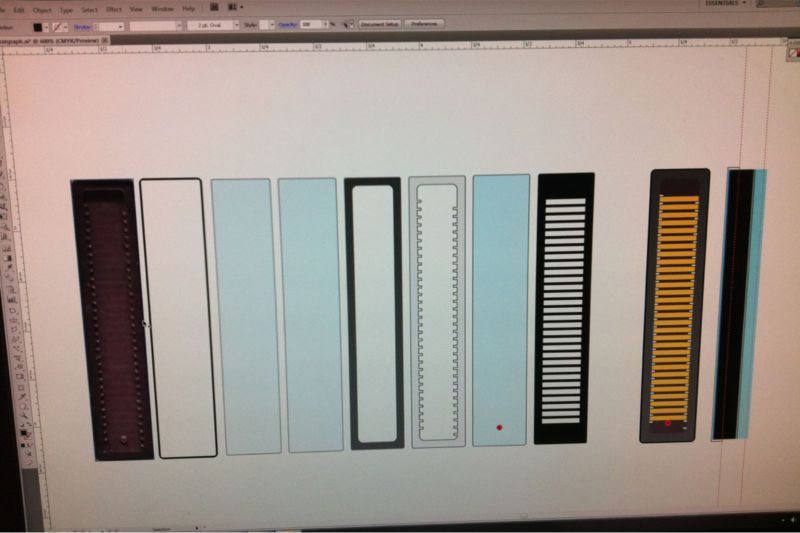
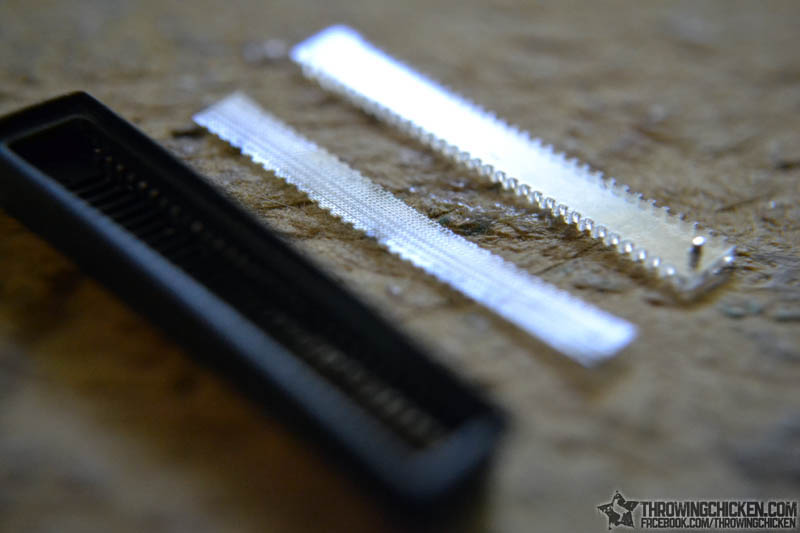
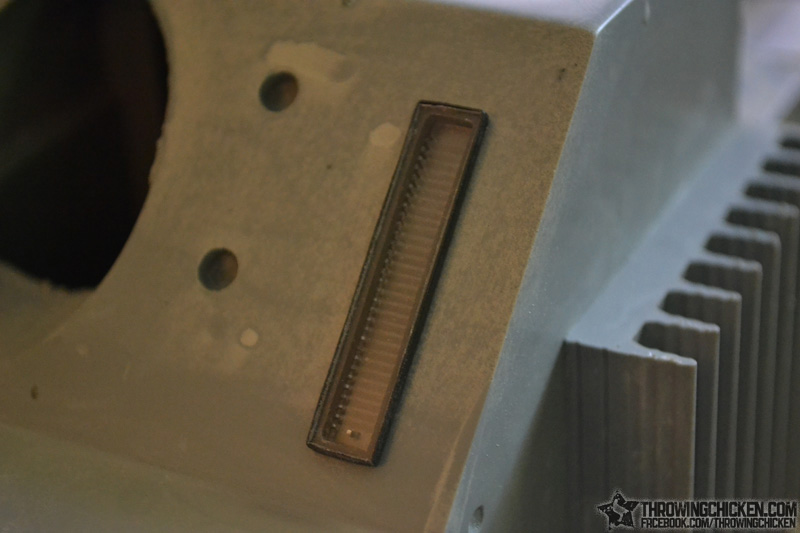
With a little trial and error, he was able to make them himself for a fraction of the cost by casting them out of resin, using our laser-cut parts to create the cast. A few of the design attempts did not come out well when cut from 1/8" acrylic since some of the features in the designs were much smaller than the thickness of the material (the design is only around 1/4" wide!). We cut various materials and thicknesses from 0.004" Mylar to 1/8" acrylic and a combination of thinner parts did the trick.
I’ll be sharing more awesome projects from Throwing Chicken in the future, but you can also check out his Artist page on Facebook for more updates. If you’d like to purchase a Ghostbusters Proton Gun Replica Kit, they’re sold on the Throwing Chicken Etsy shop.
If you have a cool project you’re working on and need some laser-cut parts: “Who ya gonna call?” (PO-LOLU!)
 |
Power level indicator replica for Ghostbusters Proton Gun. |
|---|
|
|
||||
|
|
||||
|
|
||||
|
|




Related products

LVBots March 2014 dead reckoning competition
On March 6, LVBots held another competition at Pololu. This time, it was a dead reckoning contest: each robot had to find a line course and follow it to its end while keeping track of its position, then try to return to its starting position without any external navigational aids. Scoring was based on how close to the starting position the robot ended up, as well as how quickly it got there. The complete rules are available here (23k pdf). You can see a selection of the entries in this video compilation from the contest.
David has already posted about his entry. My robot was R2-DR, the miniature astromech droid, and I’ll be writing a post about it soon, too.
Are you in the Las Vegas area? Check out the LVBots Meetup page and drop by this Thursday, March 20, to see the robots in person!
Updates: You can read more about each of our robots in these blog posts:
- David and Fang’s dead reckoning robot based on the mbed LPC1768
- Brandon’s dead reckoning robot
- R2-DR, Kevin’s dead reckoning robot
- Claire’s dead reckoning robot
- Paul’s dead reckoning robot
- Jon’s dead reckoning robot
- Jamee’s dead reckoning robot
Maestro-controlled Pan, Tilt, and Zoom (PTZ) dome camera
Pololu forum member Dev255 modified a PTZ dome camera system to be controlled by an old Xbox joystick using a 24-channel Maestro servo controller. The Maestro reads 5 potentiometers on the Xbox joystick, along with some buttons, and correlates the readings to a speed and direction value. This data is converted to the Pelco D protocol that is used by the camera and gets sent to the camera from the Maestro. The LEDs on the joystick are used to indicate the program status. He also uses the Maestro to control a 4×20 character LCD display shown in the video below.
For more information on this project, see Dev255’s original forum post.
Related products

New products: MinIMU-9 and AltIMU-10 v3
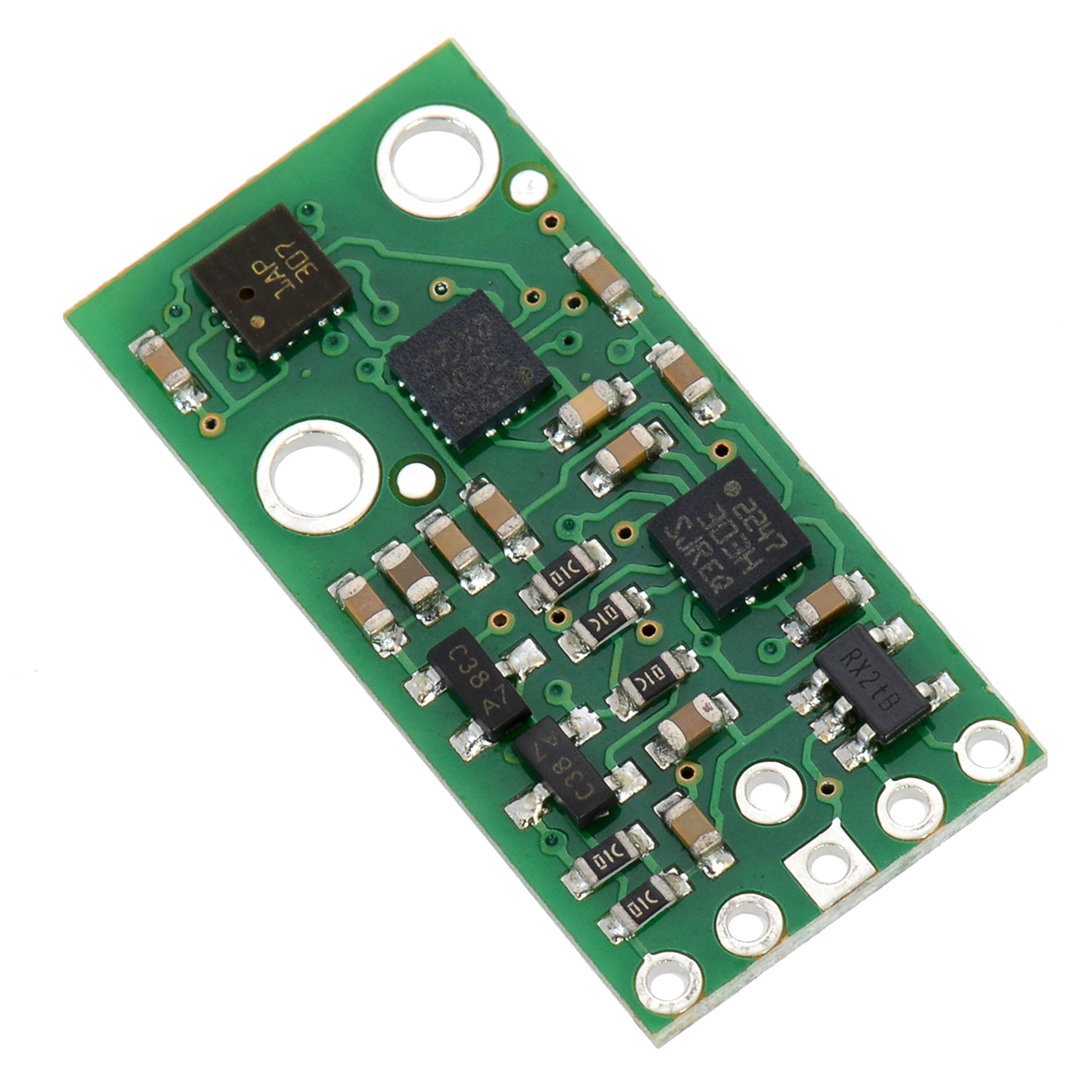 |
We are happy to introduce new v3 versions of our MinIMU-9 and AltIMU-10 inertial measurement units (IMUs). These sensor modules are the same compact sizes as their predecessors and have same pin-out, but they are based on ST’s newer and better L3GD20H 3-axis gyro and LSM303D 3-axis accelerometer/magnetometer. The nine independent rotation, acceleration, and magnetic measurements from these sensors provide all of the information required make an attitude and heading reference system (AHRS). In addition to this, the AltIMU-10 v3 incorporates an LPS331AP digital barometer that can be used to measure pressure and altitude.
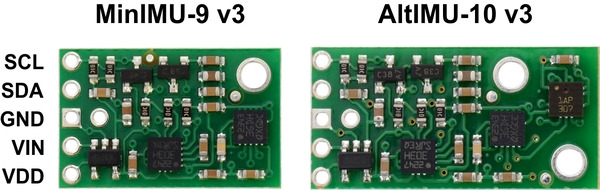 |
The new revisions offer a wider magnetic sensing range and a more accurate and stable gyro, all with lower power consumption, and they include an extra pin for changing the I²C slave addresses so that two boards can be used on the same I²C bus. They should generally be usable as drop-in replacements for our previous MinIMU-9 v2 and AltIMU-10 modules—which we have put on clearance—though changes to register locations might require updates to software that is not based on our Arduino libraries.
We also have individual carrier boards available for the L3GD20H gyro, LSM303D accelerometer/magnetometer, and LPS331AP barometer if your application doesn’t require quite so much data or if you want to build your own AHRS unit.
Related products







ToDo and Babel by Chris Eckert
Chris Eckert makes devices that explore the artistic potential of factory automation. One of his works, entitled ToDo, is an automated wall mounted device that seems to continuously write a never-ending list of things to do. Two stepper motors control the position of a pen over a roll a paper, and a servo controls the pen’s up/down movement. The device is controlled by an Arduino Uno and two of our A4988 stepper motor drivers. You can find more details about the construction in Chris’s blog posts about Todo and see more of Todo on its gallery page.
Chris is currently working on another project called Babel, which will feature about 20 devices similar to ToDo.
 |
You can learn more about Chris and his artwork on his personal website.
Related products


David and Fang's dead reckoning robot based on the mbed LPC1768
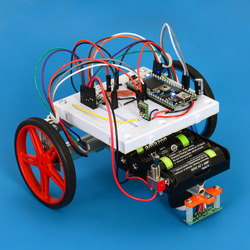
Several people here at Pololu made robots to compete in the LVBots dead reckoning competition last week. This post is about the robot I made along with another engineer here.
Dead reckoning is the process of continuously calculating your position using internal sensors that tell you something about what speed and direction you are going. In our dead reckoning competitions, robots demonstrate that they are capable of dead reckoning by following a long, twisting line drawn on the floor and then driving back to their starting point. The line functions as a user interface that directs the robots through a sequence of moves for which it was not preprogrammed. The robots are scored based on the time they took and how close they were to the starting point at the end. Continued…
New distributors around the world
We are excited to welcome several new distributors that have joined Pololu over the past few months!
 |
To start with, we have gained two new distributors in the United States. We have been following Adafruit Industries (New York, NY) for a long time – I remember receiving a SpokePOV kit as a birthday present back in 2007 – so we are particularly excited that they will now be selling some of our products. They are starting with the Zumo, which they featured in a recent new product video. We will also be distributing some of their products, such as the Adafruit Data Logging Shield for Arduino. Is there anything from Adafruit that you would like to see at Pololu? Please let us know in the comment section.
 |
Anibit Technology (Cary, NC) is another new US distributor, founded in 2013 by engineer Jon Wolfe, who is marketing his own designs along with parts from Pololu and Adafruit. We are looking forward to seeing what else he will create!
 |
Next, MiniRobot (Azcapotzalco, Mexico City, Mexico), joins a number of other Mexican distributors. They carry a large selection of parts, including many Pololu items, as well as Arduinos, components, and prototyping supplies.
 |
Continuing south, we have a new distributor in Viña del Mar, Chile: Zambeca. In addition to carrying a number of Arduino, Lilypad, and robotics-related products, they have been posting some interesting-looking project videos on their blog (in Spanish). We have one other distributor in Chile, MCI Ltd – Olimex Chile, who has been with us since 2009.
 |
We now have a distributor in China, ALSRobotBase, located in Harbin, Heilongjiang province. They have a whole “Pololu” category and are also offering to help customers in China with special orders.
 |
Finally, Pimoroni in Sheffield, United Kingdom, is a new distributor specializing in accessories for the Raspberry Pi. They join a number of other UK distributors.
For distributors in your area, you can check out our complete list of almost 200 distributors.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









