Pololu Blog »
Pololu Blog (Page 63)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Aluminalis, a sixteen-legged walking robot
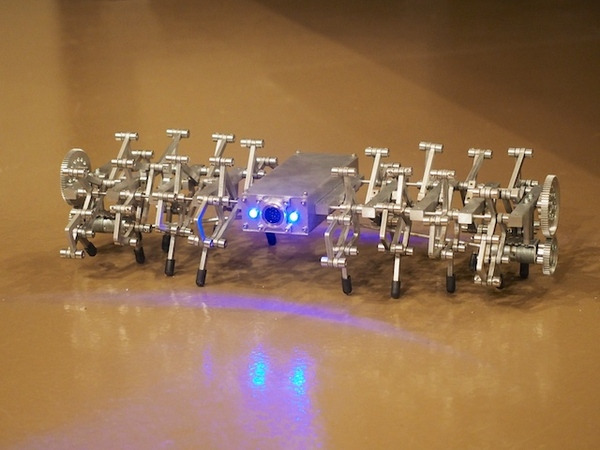 |
The Beatty family is at it again with their amazing robot builds (if you missed it, check out their Mars Rover). They completed Aluminalis, a sixteen-legged walking robot made mostly out of machined aluminum components.
The video above shows their magnificent sixteen-legged walking robot. It is all controlled by an Arduino Nano and uses Pololu 20D 73:1 metal gearmotors with matching brackets to move all of its aluminum legs.
For more information on Aluminalis, check out its build page.
Related products


New product: FEETECH FS90R Micro Continuous Rotation Servo
 |
 |
Continuing with our recent theme of tiny new actuators, we are now carrying FS90R micro continuous rotation servos from FEETECH. Continuous rotation servos are standard hobby RC servos that have been modified for open-loop speed control instead of their usual closed-loop position control, and they make convenient drive systems for robots because they are effectively a motor, gearbox, and motor controller/electronic speed control (ESC) in a single compact package. They are also very easy to use as they can be connected directly to an RC receiver or controlled by a single microcontroller I/O line programmed to output RC servo pulses.
With a weight of just 9 g, the FS90R is the smallest servo we have come across that is manufactured specifically for continuous rotation. It has great speed and torque for its size (up to 130 RPM and 1.5 kg-cm at 6 V), and at only $5 per servo, it is a very simple and affordable way to add some motion to your next project. For comparison (or if you are looking for an alternative servo that offers position control), it is very similar in size, weight, speed, and torque to the Power HD Micro Servo HD-1900A.
For more information on the FS90R micro continuous rotation servo, see the product page. For other options, you can check out our full selection of continuous rotation servos or our entire RC servo category.
 |
Continuous rotation servo size comparison. From left to right: SpringRC SM-S4303R, Power HD AR-3606HB, FEETECH FS5106R, Parallax Feedback 360°, Parallax (Futaba S148), and FEETECH FS90R. |
|---|
Related post: Understanding continuous-rotation servos and multi-turn servos
Related products

Zumo tennis ball collector
Forum user patman715 posted to the forum about his modified Zumo Robot. The video above shows a Zumo with a two-servo gripper and arm capable of lifting tennis balls into an on-board storage bin. It is all controlled by an Arduino Leonardo, and two of our 100:1 micro metal gearmotors (we suspect they are HP versions) seem to give it plenty of oomph for carrying around the extra load.
Related products

New versions of our 500mA D24V5Fx step-down voltage regulators
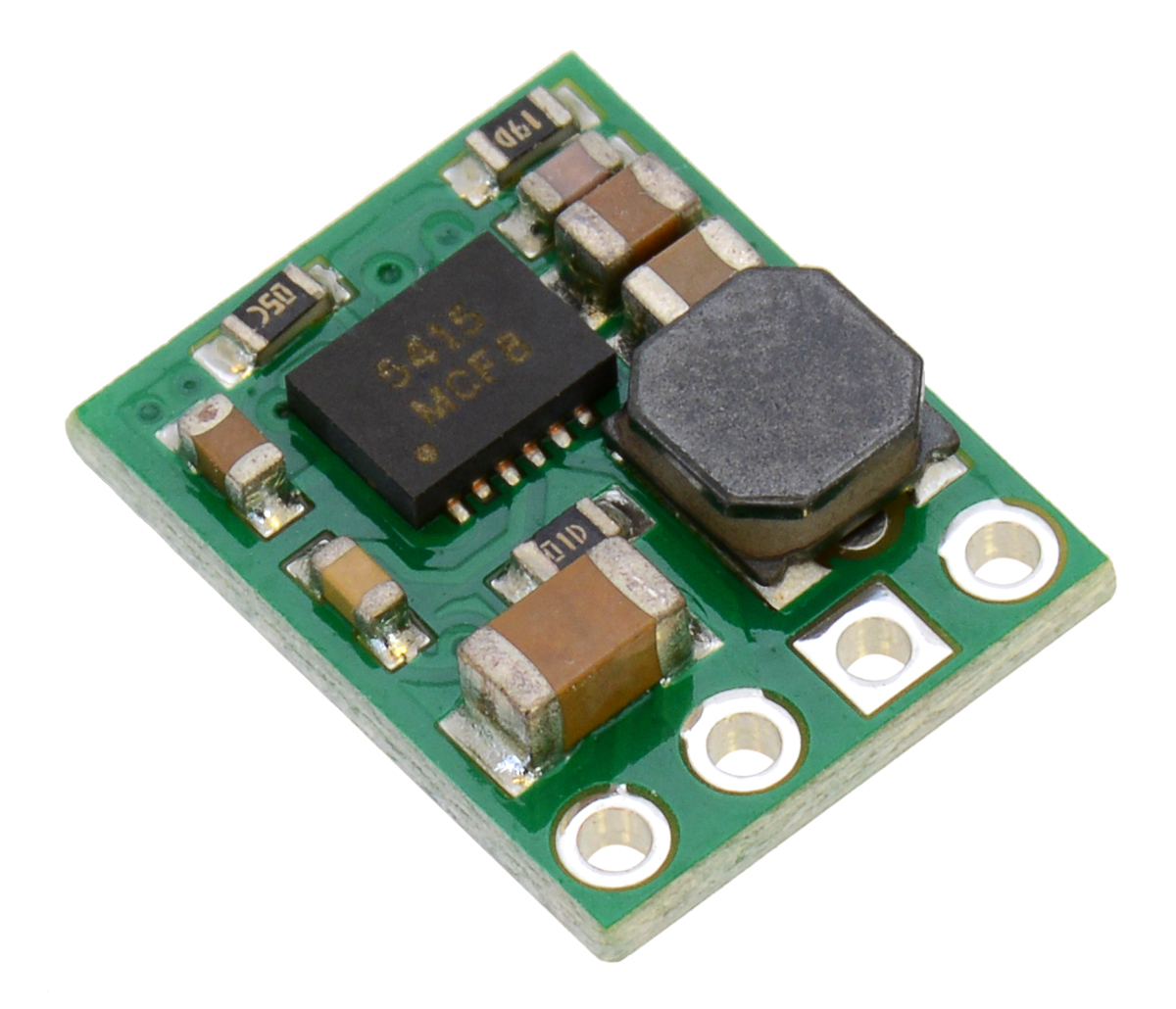 |
A few months ago, we introduced our new D24V5Fx buck (step-down) voltage regulator family with inaugural members offering fixed output voltages of 3.3 V, 5 V, 9 V, and 12 V, and now we have expanded that family by adding versions with fixed output voltages of 1.8 V, 2.5 V, 6 V, and 15 V.
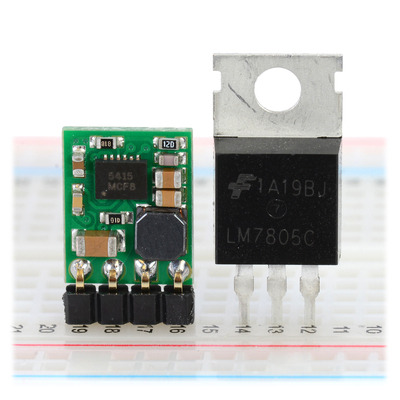
We are particularly excited about this regulator family because of its wide operating voltage range, high efficiencies, and low dropout voltages, all in a compact 0.5″ × 0.4″ × 0.1″ (13 mm × 10 mm × 3 mm) form factor that is smaller than standard through hole linear regulators with DIP packages. For example, the picture below shows a D24V5Fx next to a 7805 voltage regulator in a TO-220 package:
 |
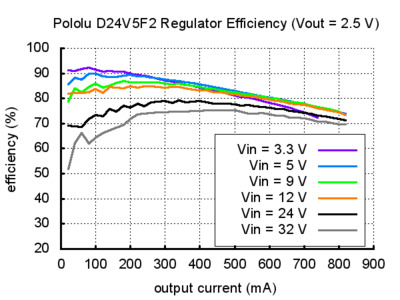
These regulators operate at up to 36 V, making them especially useful in applications where there can be large variation in the input voltage, such as solar-powered systems or devices where power supply flexibility is a benefit. Since they are switching regulators, the efficiency is much higher than linear regulators when there is a big difference between the input and output voltage, and since they are synchronous, the efficiency is high even at light loads and low output voltages. As an example of the versatility of these regulators, the same D24V5F2 module can in one application be used to get 2.5 V from a 24 V battery and in another be an efficient way to add a 2.5 V node to a system that already has regulated 5 V. As the performance graph below shows, typical efficiency in the latter scenario is 90%, which could almost double battery life in portable systems when compared to linear regulators.
 |
We consider the new D24V5Fx regulators to be next-generation alternatives to our D24V3Fx and D24V6Fx buck regulators, which have been some of our most popular products. In addition to having generally higher efficiencies (which in practice allow these 500 mA units to achieve maximum output currents comparable to our 600 mA D24V6Fx units), these new regulators have much lower dropout voltages (“dropout voltage” is the amount by which the input voltage must exceed the output voltage in order to ensure that the target output can be achieved). For example, the two graphs below show the dropout voltage of the new 5 V D24V5F5 compared to the older 5 V D24V6F5 and D24V3F5:
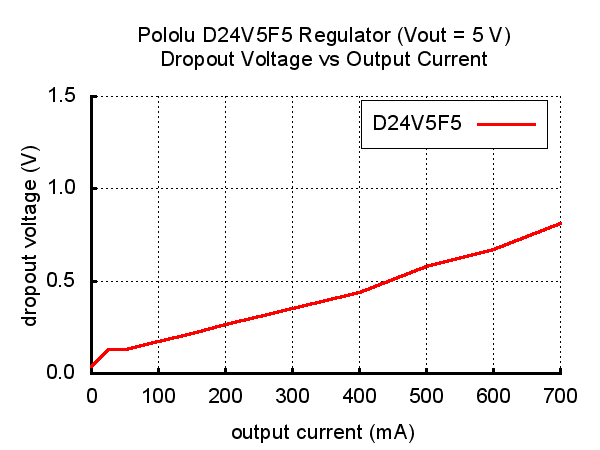 |
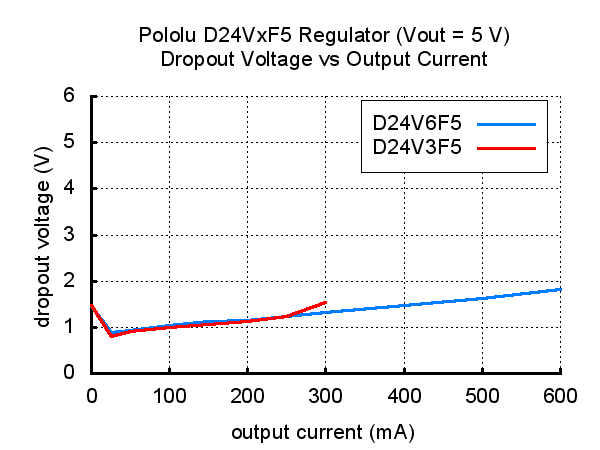 |
What this means for your project is broader operating ranges and longer battery life. For instance, a low-power 5 V system running on a 9 V battery can discharge it all the way to 5 V whereas the higher-dropout D24V6F5 regulator can only go to 6.5 V, and four-cell alkaline and five-cell NiMH packs (both with 6.0 V nominal voltages) become viable options.
For other regulator options, you can take a look at our full selection of step-up voltage regulators, step-down voltage regulators, and step-up/step-down voltage regulators.
Related products

New product: LPS25H pressure/altitude sensor carrier
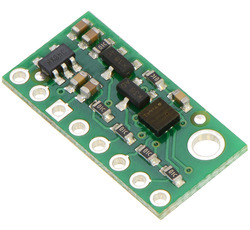
We’ve just released a carrier board for ST’s newest pressure sensor, the LPS25H, and we’re also lowering the price of our LPS331AP carrier.
Like the LPS331AP, the LPS25H provides pressure readings over a range of 260 mbar to 1260 mbar (26 kPa to 126 kPa), and this data can be used to calculate the sensor’s altitude. Our LPS25H carrier mounts the sensor on a 0.4″ × 0.8″ board (0.1″ shorter than our earlier LPS331AP carrier) that breaks out all of its pins, and as usual, we’ve included level shifters and a regulator to make it easy to use in a 5 V system. Continued…
New product: Adafruit Pi Case
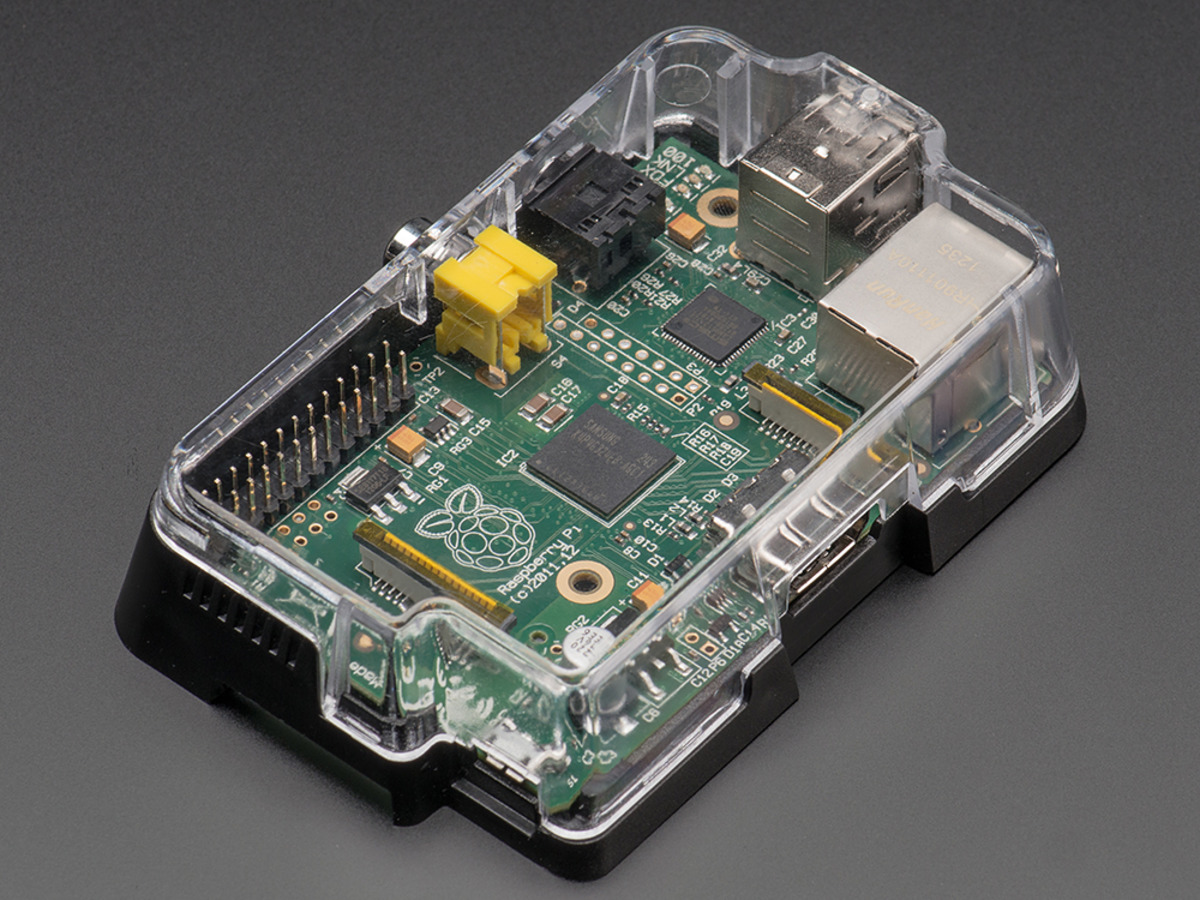 |
We are expanding our selection of products from Adafruit, and the latest addition is the Adafruit Pi Case, a stylish protective enclosure for the Raspberry Pi. And to celebrate, we are dropping the price of our Raspberry Pis!
Related products


Closed Monday, May 26
 |
We will be closed on Monday, May 26 in observance of Memorial Day. Orders placed after 2 PM Pacific Time on Friday, May 23 will be shipped on Tuesday, May 27.
New products: sub-micro plastic planetary gearmotors & compatible wheels
 |
Need a “little” help with your next electronics project? Get it up and running with our sub-micro plastic planetary gearmotors! Measuring a minuscule 6 mm in diameter and weighing just over a gram, these gearmotors are even smaller (and much lighter) than our popular micro metal gearmotors.
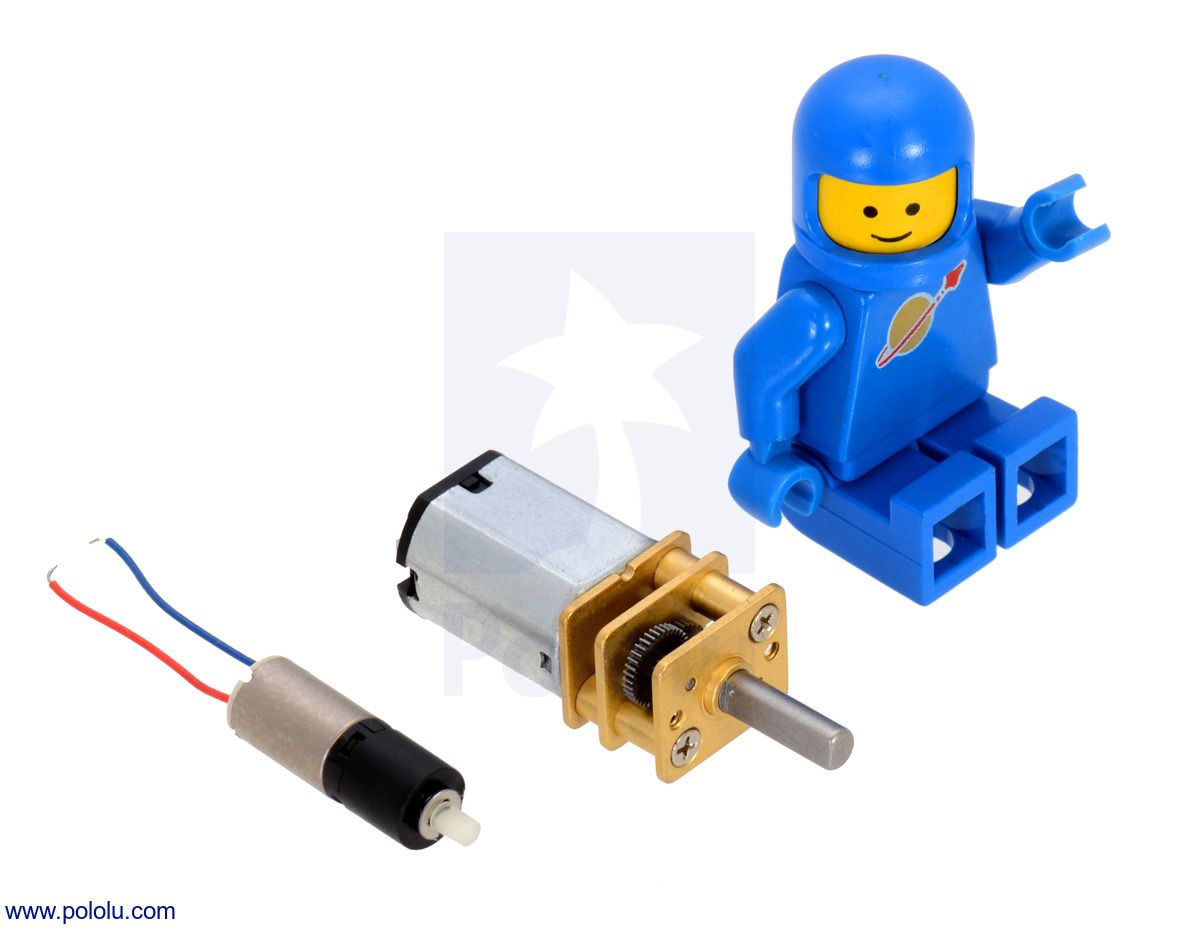 |
26:1 sub-micro plastic planetary gearmotor next to a Micro Metal Gearmotor and a LEGO Minifigure for size reference. |
|---|
Our sub-micro plastic gearmotors are available in two gear ratios: 26:1 and 136:1. Click on those ratios to learn more about each motor!
Motor accessories
While there are no mounting holes, their cylindrical bodies makes them perfect for snapping into 1/4″ (6 mm) fuse clips, and their small scale makes it easy to affix them with tape or glue. We are also now carrying tiny 14 × 4.5 mm wheels, which are compatible with the sub-micro plastic gearmotor output shafts.
|
|


But, Jon, what can I do with such a tiny, adorable motor?
I’m glad you asked! The way I see it, you really only have two options:
- Spin something really tiny and adorable.
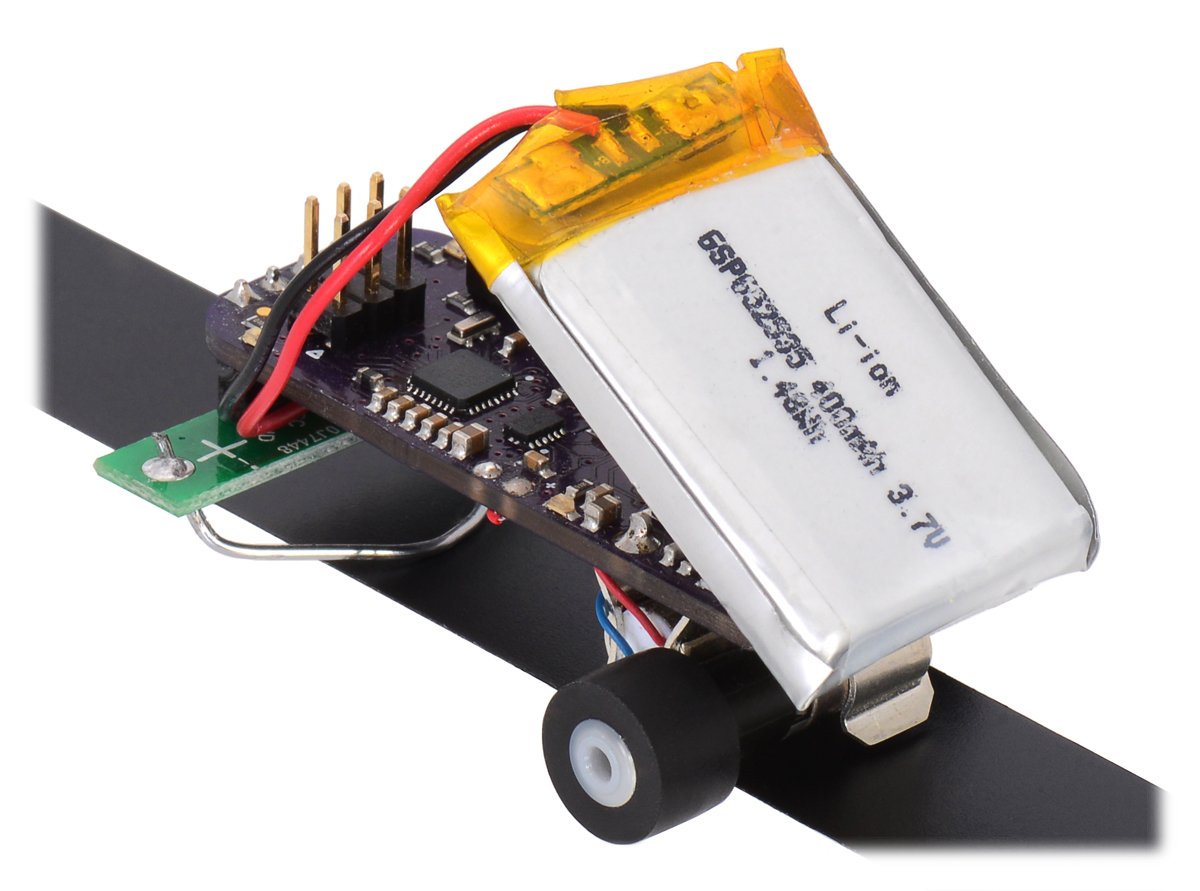
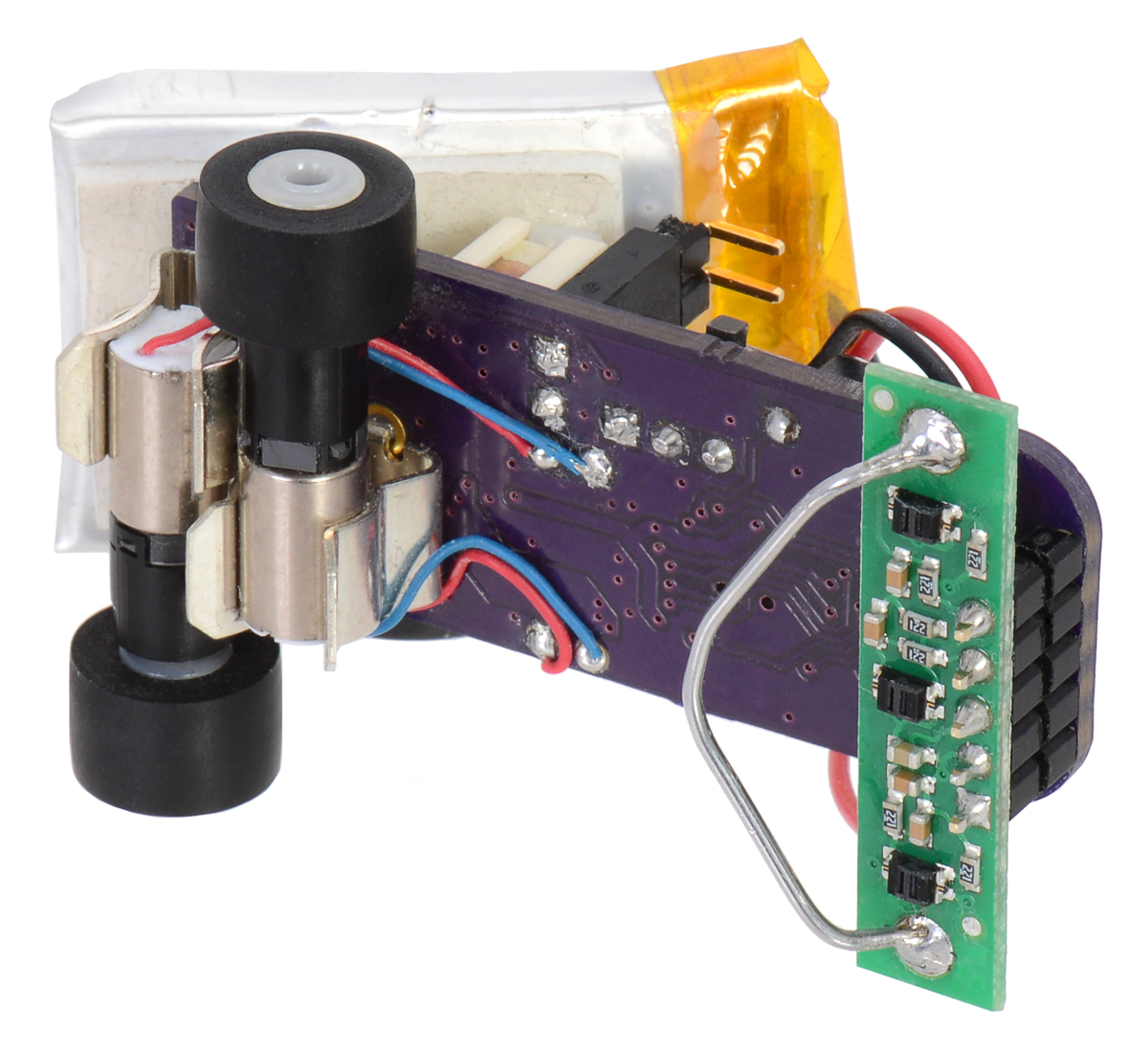
- Make something tiny and adorable like this line follower made by Pololu engineer Kevin (blog post coming soon!):
|
|
I’m just kidding; there are definitely plenty of interesting things that can be made with these motors. We can’t wait to see what you use these motors for!
Related products



New product: Metal servo horn for HD-1235MG giant servos
 |
We are now carrying metal servo horns that work with Power HD’s ultra-high-torque HD-1235MG giant servos, which can deliver a whopping 560 oz-in (40 kg-cm) at 7.4 V. If you want to get the most power out of your HD-1235MG, I recommend substituting one of these anodized aluminum horns for the included plastic horns.
 |
Related products


New distributors in Singapore and Colorado
We are happy to announce two new Pololu distributors:
 |
Sun Light Electronics Pte Ltd is an electronics supplier in Singapore that was founded in 1992. They specialize in “ICs and transistors”, but as you can see from their website, they now carry far more than that, including a large selection of hobby, robotics, and prototyping products.
 |
Virtuabotix, in Colorado Springs, CO, is an electronics hardware manufacturer and distributor. They specialize in open-source hardware and have their own family of Arduino-compatible boards called Versalino. Virtuabotix also sells products through storefronts at Amazon, Newegg, and eBay.
See our growing list of almost 200 distributors to find one in your area.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









