Electronics » Sensors » Force-Sensing Resistors and Linear Potentiometers »
Force-Sensing Resistor: 0.6″-Diameter Circle, Short Tail

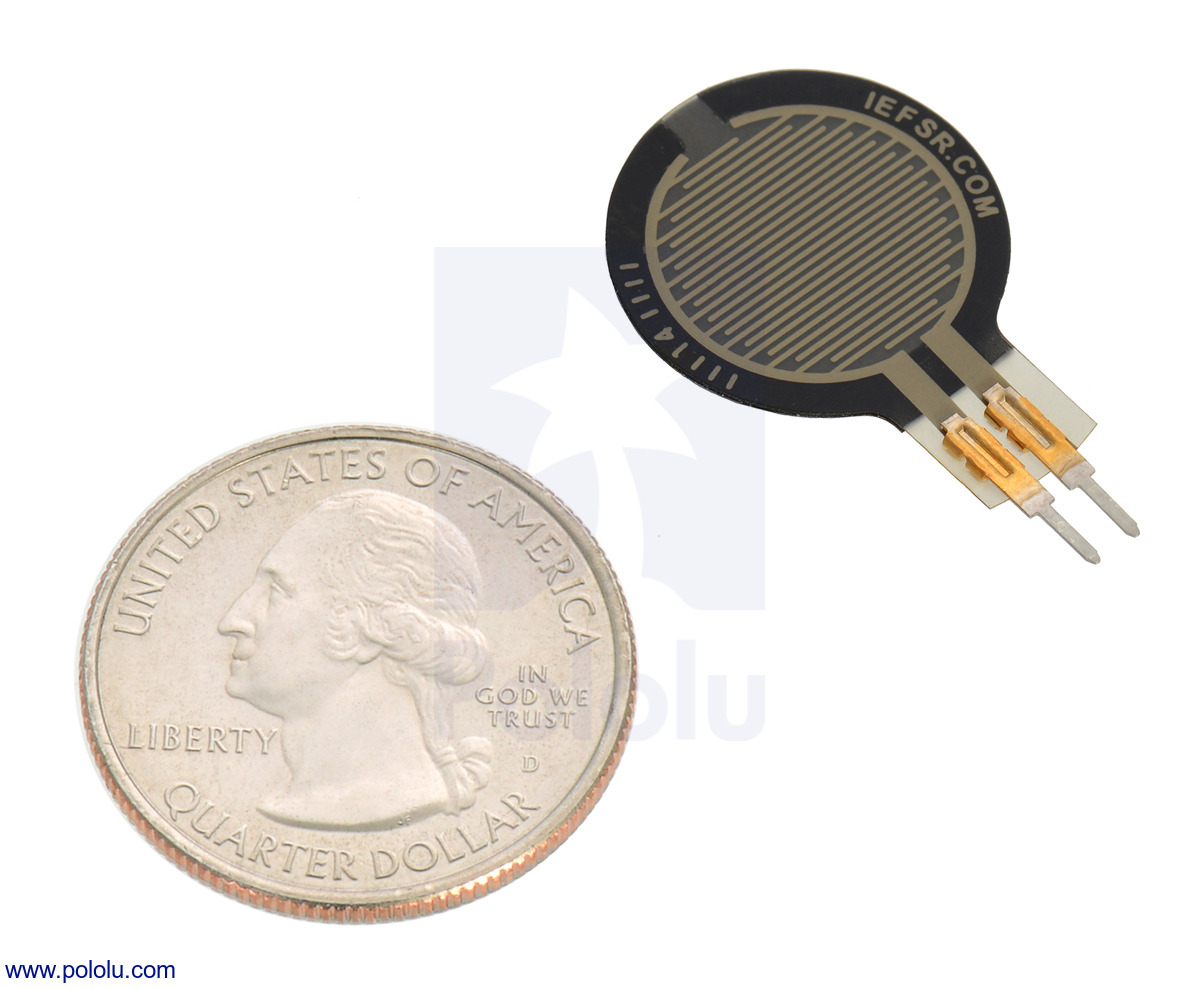
This force-sensing resistor (FSR) from Interlink Electronics is a passive component that exhibits a decrease in resistance when there is an increase in the force applied to the 0.58″-diameter (1.5 cm) active area, allowing you to create a sensor that is able to detect force or pressure. With a force sensitivity range of a few grams to a few kilograms, this sensor is optimized for use in human touch control applications.
Alternatives available with variations in these parameter(s): size Select variant…
 Compare all products in Force-Sensing Resistors and Linear Potentiometers.
Compare all products in Force-Sensing Resistors and Linear Potentiometers.
| Description | Specs (2) | Pictures (4) | Resources (2) | FAQs (0) | On the blog (1) | Distributors (7) |
|---|
 |
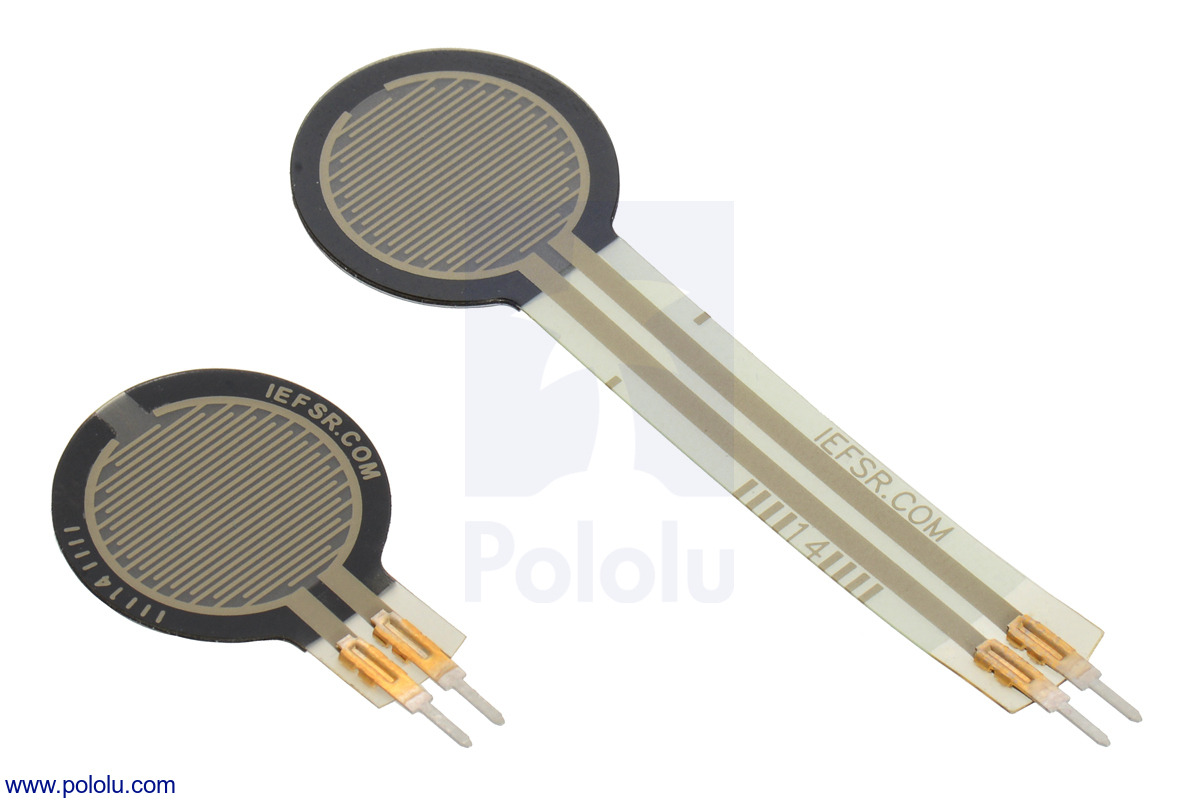 |
0.6″-diameter short-tail force sensing resistor (FSR) next to a 0.6″-diameter FSR with a standard tail. |
|---|
Overview
This force-sensing resistor (FSR) from Interlink Electronics is a passive component that acts as a variable resistor, with resistance decreasing in response to increasing applied force, which makes it easy to add a touch interface to your project or create a robot with much more sophisticated tactile senses than are possible with simple lever switches. The polymer thick film (PTF) device is optimized for use in human touch control of electronic devices and can sense an applied force anywhere in the active area ranging from a few dozen grams to a few kilograms (0.2 N to 20 N).
In our tests, the resistance exceeded 1 MΩ with no applied pressure and ranged from around 100 kΩ to a few hundred Ohms as finger pressure varied from light (a few dozen grams) to heavy (pressing as hard as possible). The resistance is very stable when the pressure is fixed, and the readings are very repeatable (there are no problems with hysteresis). This resistance range is well suited to work directly with the internal pull-ups of many microcontrollers such as AVRs and PICs. The FSR was responsive enough and sensitive enough to distinctly pick up light, rapid finger taps, and it was even able to pick up the vibrations of a small vibration motor placed on it on the motor’s side.
The 0.72″-diameter circular pad is flexible, light (0.25 g), and extremely thin (0.02″), and it has a circular active sensing area with a diameter of 0.58″. It does not appreciably compress when pressure is applied, and it has a masked adhesive backing for easy mounting. The FSR has two male pins (called “solder tabs”) spaced 0.1″ apart, which means they are compatible with most solderless breadboards and perfboards, though the solder tabs are too short to work well with many 0.1″ connectors. (A very similar FSR with a much longer tail is also available; see the picture on the right for a side-by-side comparison of the two versions.)
Note that this FSR is not a load cell or strain gauge, and it is not suitable for precision force measurements. While it can be used for high-resolution dynamic measurement, only qualitative results are generally attainable. Force accuracy ranges from 5% to 25% depending on a number of factors, and the resolution is better than 0.5% of the full range. Please see the resources tab for more information, including force-vs-resistance curves, integration notes, usage tips, and suggested electrical circuits.
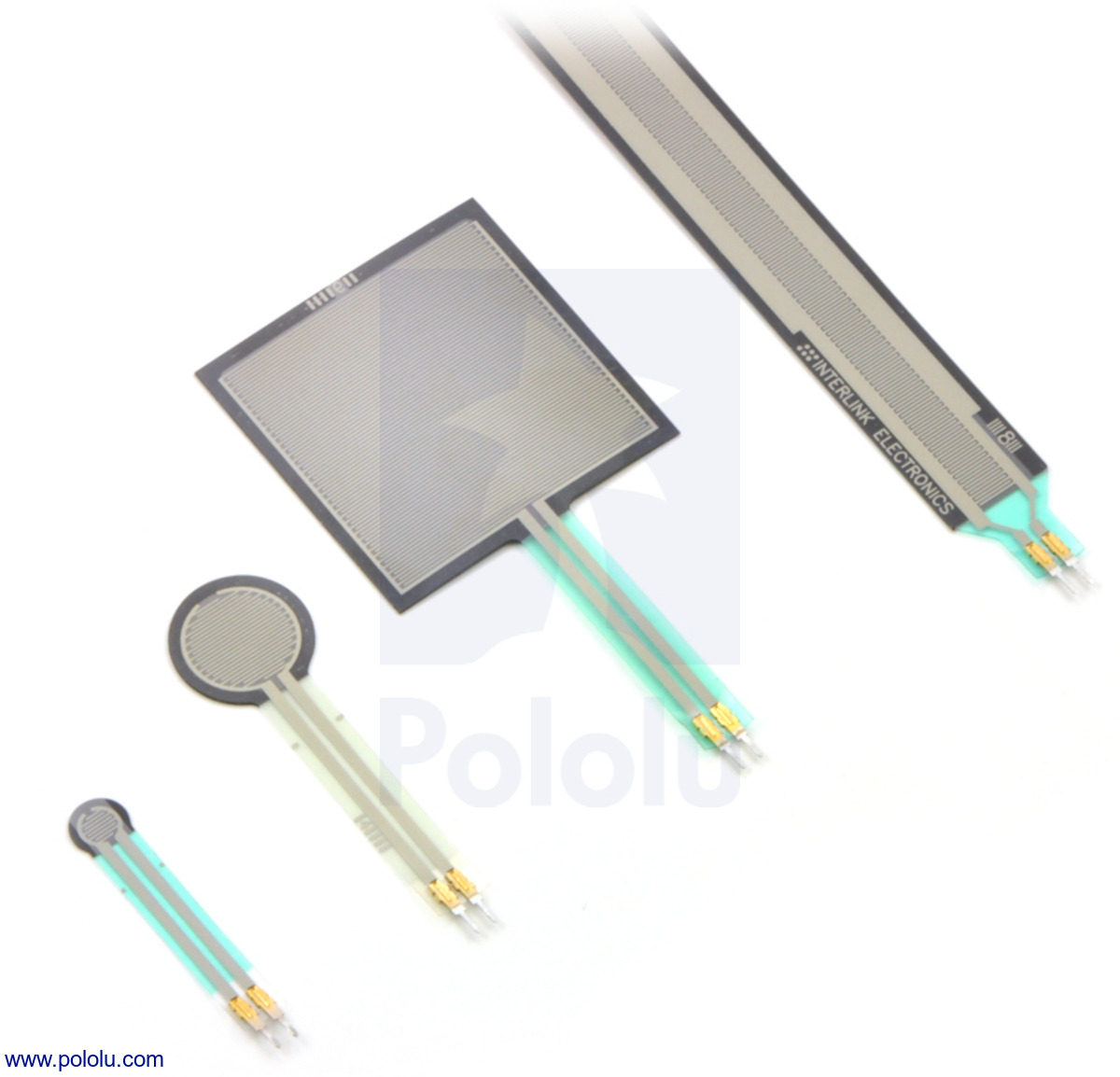 |
A variety of force-sensing resistors (FSRs). |
|---|
FSR/FSLP versions
Interlink refers to this product as part number FSR 402 Short in their FSR 400 series. We have seven versions of force-sensing resistors available, which lets you choose the one with the dimensions that best suit your application:
- 0.2″-diameter circle (FSR 400)
- 0.25″-diameter circle, short tail (FSR 400 Short)
- 0.6″-diameter circle (FSR 402)
- 0.6″-diameter circle, short tail (FSR 402 Short)
- 1.5″×1.5″ square (FSR 406)
- 1.4″×0.4″ strip (standard FSLP)
- 4.0″×0.4″ strip (10 cm FSLP)
Note that the last two sensors in this list are FSLPs (force-sensing linear potentiometers) that let you detect both the amount of applied force and where on the strip the force was applied.
Example applications
- Pressure-sensitive touch user interface
- Tactile sensor for robotic appendages
- Finger pads for special gloves
- Target contact detection
Related products



















Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
