Pololu Blog »
Pololu Blog (Page 69)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New NEMA 17 stepper motor with optional integrated lead screw
|
|


We have added a compact, powerful new NEMA 17-size stepper motor to our wide selection of stepper motors. This 42×38 mm stepper motor is available with a standard 5 mm D-shaft for general-purpose use, but perhaps more exciting is the version with a 28 cm threaded rod, which turns it into a linear actuator capable of precision open-loop position control. This latter version has the stainless steel lead screw built right into the stepper motor, so there is no need to deal with extra hardware such as shaft couplers and set screws, and the copper alloy traveling nut with mounting holes is included. Raise your next project to new heights with the precision (40 µm per full step) and control of a stepper motor!
 |
Please see the product pages for more information:
- Stepper Motor: Bipolar, 200 Steps/Rev, 42×38mm, 2.8V, 1.7 A/Phase
- Stepper Motor with 28cm Lead Screw: Bipolar, 200 Steps/Rev, 42×38mm, 2.8V, 1.7 A/Phase
For other options, you can take a look at our full selection of stepper motors.
Related products


New product: Adafruit Data Logging Shield for Arduino
 |
This data logger shield from Adafruit provides an easy way for your Arduino to save data so you can process and analyze it later. It accepts any SD card formatted with a FAT16 or FAT32 file system, and it includes a real-time clock (RTC) for accurate timestamping of your data. Lots of documentation and resources are available from Adafruit to help you get started with the shield.
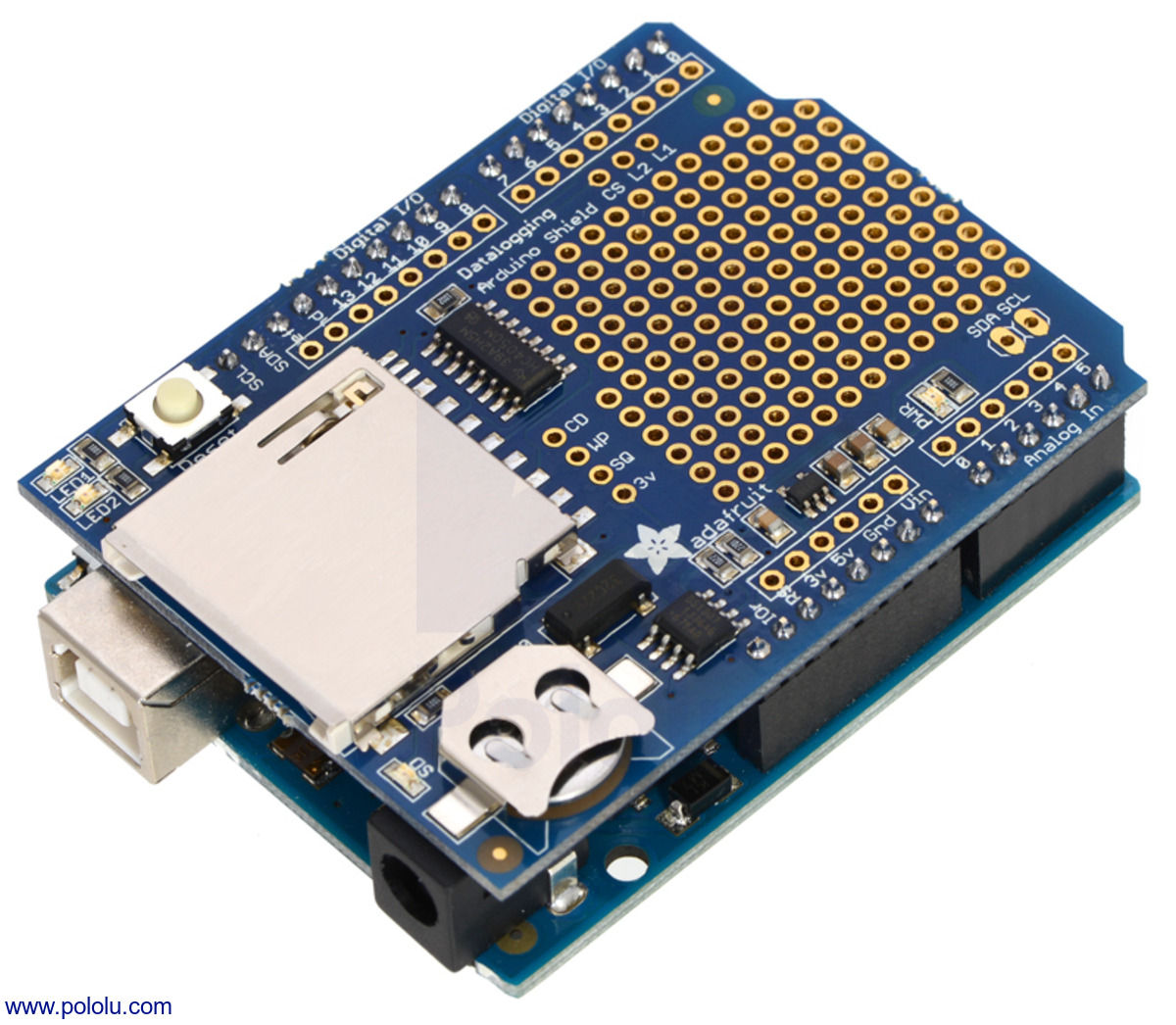 |
For more information, see the Adafruit Data Logging Shield for Arduino product page.
Related products

New product: 5V wall power adapter with USB port
 |
Looking for a power supply for your Raspberry Pis, Arduinos, Wixels, or Maestro servo controllers? Look no further!
This UL-certified AC-to-DC converter gives you an easy way to deliver up to 1 A to your USB-powered device from a US-style AC electrical socket. It has been specifically designed to supply 5.25 V instead of 5 V to help ensure that the device it is powering receives close to 5 V even when the current draw is high. This converter is safe for use with USB-compliant devices.
This adapter does not include a USB cable, but it features a USB “A” port that you can plug a standard USB cable into, which makes it great for transitioning your project from USB to wall power.
For more information, see the 5V wall power adapter product page.
Related products

New product: Hydra Smart DC Power Supply
 |
The Hydra is a triple-output power converter from CH Robotics designed to make it easier to get the power you need for your next project. The Hydra can quickly give you access to three independent, software-configurable DC output voltages to power your system. The easy-to-use Smart Power Supply Control Software makes it quick and simple to configure and control the Hydra’s outputs from your computer via USB. Bench-top power supplies can be large and bulky, but the Hydra fits in the palm of your hand and can also be configured from a user-programmable microcontroller via serial. This flexibility makes the Hydra a great fit for a large variety of projects, whether you are building an industrial system or a small mobile robot.
 |
For more information, see the Hydra product page.
Related products

The "Internet of Things" at AT&T DevSummit Hackathon
 |
Our presentation at the AT&T DevSummit Hackathon. From @IoTHackathon. |
|---|
This weekend, a few of my coworkers and I participated at the AT&T Developer Summit Hackathon at the Palms Casino here in Las Vegas. We were exposed to some of the latest technology in the “Internet of Things”, which refers to the process of collecting data that is transmitted wirelessly from a plethora of tangible items. The event was by far the best hackathon I have attended. As developers, we were given the opportunity to work with some of the latest relevant products:
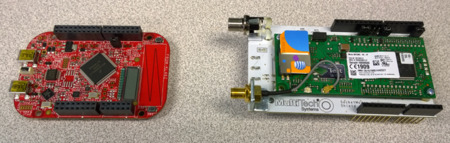 |
FRDM-KL46Z Kinetis development board by Freescale and SocketModem HSPA+ Arduino Shield by MultiTech, two boards that were available at the event. |
|---|
We partnered up with four developers from around the country to create an app that tracks someone having an emergency and directs first responders to their location. We envision this could be useful at large venues such as Rain Nightclub, where the hackathon was held.
To locate a patron within the nightclub, we used a fixed array of Qualcomm Gimbals, which are Bluetooth Smart devices that send signal strength metrics to nearby Bluetooth receivers. We created an iOS app that received data from the Gimbals and transmitted that data to the AT&T M2X API, a cloud-based datastore.
Next, we used that data to point the first responder in the direction of the patron. Our “first responder” wore an unreleased Plantronics Bluetooth headset, most similar to their Voyager Legend line, with a built in gyroscope. We calibrated the gyro at the entrance to the room and then (using trigonometry) we told the first responder to “turn left”, “turn right”, or “go straight”.
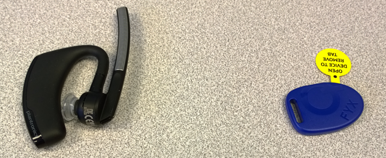 |
Plantronics Voyager Headset and Qualcomm Gimbal. |
|---|
To our delight, we won a prize for the “Best Use of a Plantronics Product” category: thanks, Plantronics! Overall this was a great experience. We plan to continue to develop applications for our Plantronics headset and the "Internet of Things” in general. We look forward to applying what we learned to develop new products here at Pololu.
Free Elektor magazine January/February 2014
 |
Get a FREE copy of Elektor magazine’s January/February issue with your order while supplies last. To get your free issue, enter the coupon code ELEKTOR0114 into your shopping cart. The magazine will add 8 ounces to the package weight when calculating your shipping options.
For other issues and more information, see our Free Elektor Magazine Offers page. All issues are now available for shipping worldwide!
Related products

Raspberry Zumo Robot
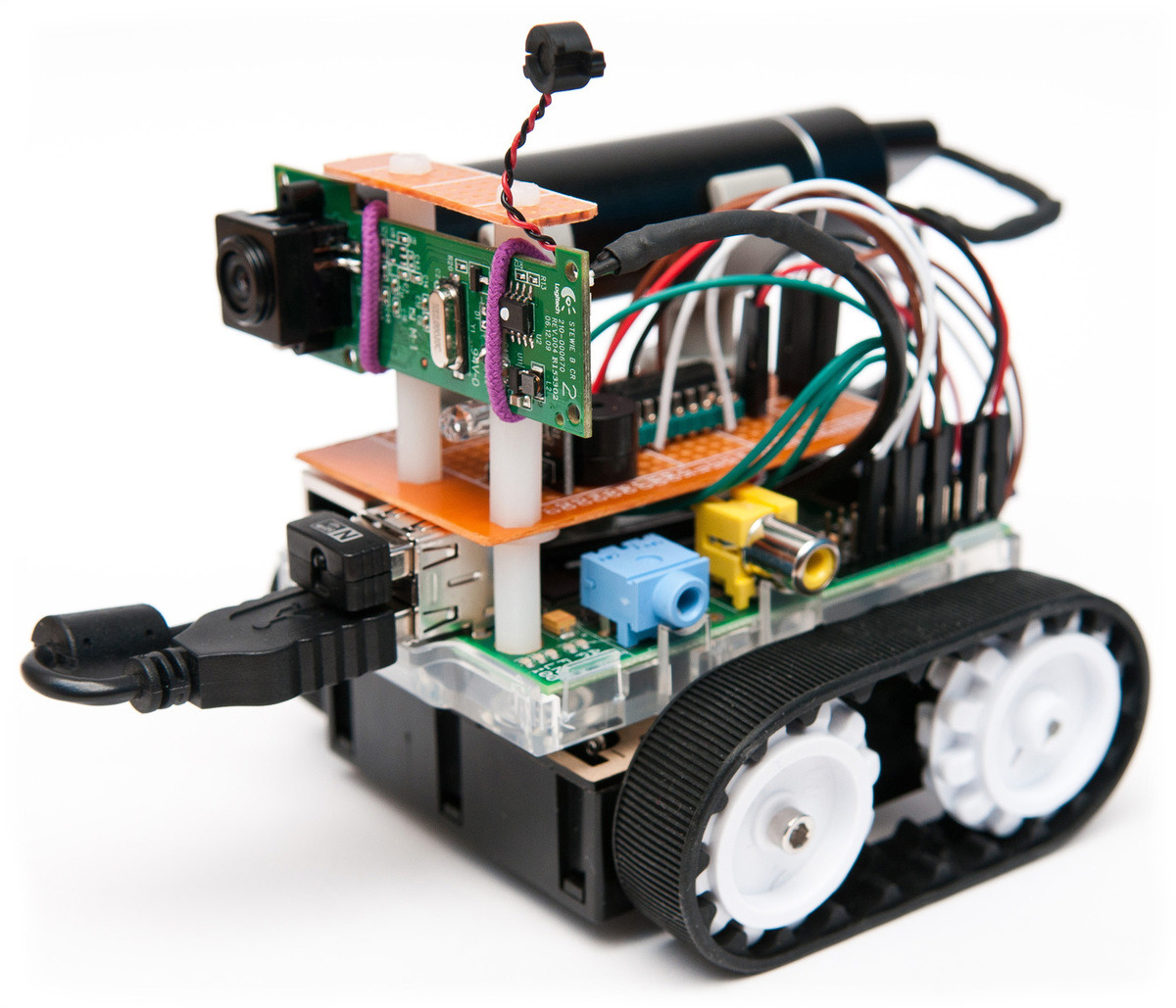 |
Frédéric Jelmoni built a neat robot with a Raspberry Pi and a Zumo Chassis Kit. The Raspberry Zumo robot can be controlled over WiFi using telnet. The server on the Raspberry Pi is written in Python and uses the RPIO library to send signals to an SN754410 motor driver that drives the two 100:1 Micro Metal Gearmotors HP in the Zumo chassis. The server also controls an RGB LED and a buzzer. A stripped-down Logitech webcam attached to the front of the robot provides video that is streamed over the web using mjpg-streamer.
For more details, see the Raspberry Zumo page, which is written in French. Also, see our post from last October about a similar robot, the Pibot-B.
Related products




New short-range analog Sharp distance sensor
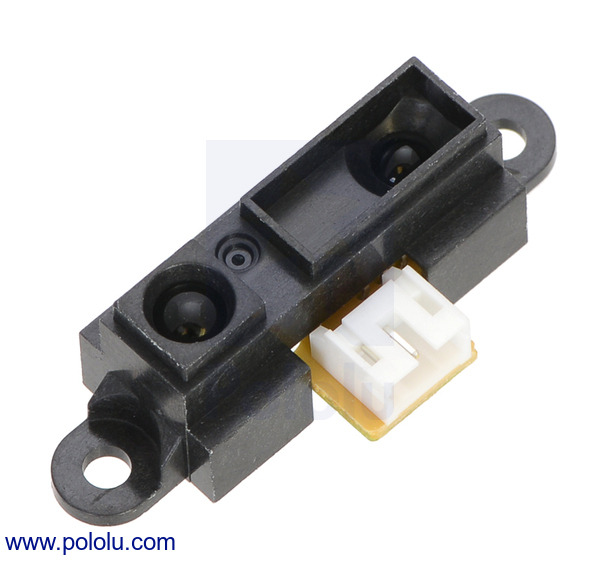 |
After having been out of the short-range Sharp GP2D120XJ00F analog distance sensor for a while, we are happy to have a higher-performance replacement: the Sharp GP2Y0A41SK0F analog distance sensor. The newer GP2Y0A41SK0F has the same physical dimensions, pinout, and 4 cm to 30 cm operating range as the original GP2D120XJ00F, but it offers a much higher update rate and lower average current draw. This sensor is an inexpensive and easy way to add close-proximity rangefinding or obstacle detection to your electronics or robotics project.
For longer-range analog rangefinders and shorter-range digital distance sensors, check out our full selection of optical rangefinders.
Related products


Powerful new S18v20x step-up/step-down regulators
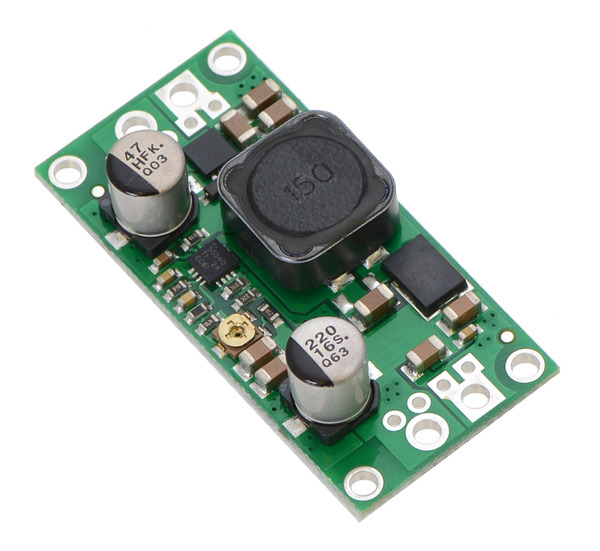 |
Earlier this month we introduced our new line of powerful U3V50x boost regulators; now we have a similarly powerful family of S18V20x step-up/step-down voltage regulators to go along with them! We are especially excited about these regulators, which have a wide 3 V to 30 V input voltage range, typical efficiency of 80% to 90%, and maximum output current of approximately 2 A when the input voltage is near the output voltage.
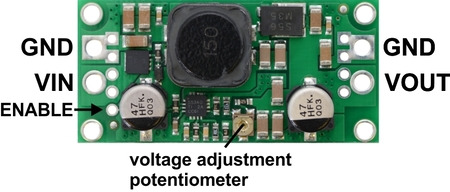 |
Step-up/step-down regulators like the S18V20x work with input voltages that are less than, equal to, or greater than the output voltage. This makes them especially well suited for battery-powered applications where the nominal battery voltage is close to the desired output voltage, and the actual battery voltage transitions from above the output to below as the battery discharges. For example, these regulators make it possible to get a steady 12V from a 12V battery or a steady 6V from five NiMH cells, which can be over 7 V when fully charged and below 5 V when drained. These regulators are also great for applications where having a very wide operating voltage range is desirable, such as projects where you want a lot of flexibility in power supply choice or in systems powered by alternative energy sources like solar or wind, where the output voltage can vary greatly.
The S18V20x family includes versions with fixed 5 V, 6 V, 9 V, or 12 V outputs and versions with adjustable 4 V to 12 V or 9 V to 30 V outputs. All of them feature built-in reverse-voltage protection, over-current protection, thermal shutdown, and an under-voltage lockout that keeps the modules from behaving erratically when the input voltage gets too low.
|
|
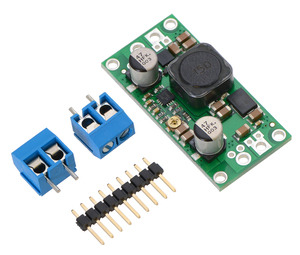

The compact boards (0.825″ × 1.7″) have four mounting holes for #2 or M2 screws and can be assembled with the included 5mm-pitch terminal blocks or 0.1″ header pins.
For other regulator options, you can take a look at our full selection of step-up/step-down regulators, step-up voltage regulators, and step-down voltage regulators.
New products: Vishay 38 kHz IR detector modules
 |
Modulated IR detectors typically used for remote control of household electronics have long been used in robot sensors because they are small, cheap, and very sensitive while still blocking out unwanted interference. However, part of what makes the modules so good for remote control is their complex automatic gain control (AGC) circuitry that adjusts the sensors’ sensitivity to ambient lighting conditions to give clean, digital outputs in a variety of environments. Unfortunately for those using the modules for other purposes, all of that magic is internal to the modules and leads to two shortcomings: we cannot know how strong the optical signal is because we do not know the gain value, and we cannot have consistent behavior because we cannot control how the AGC behaves.
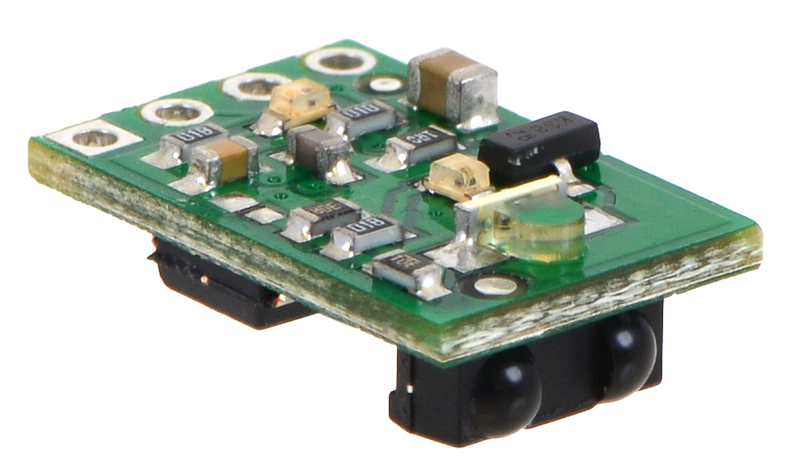 |
Pololu 38 kHz IR proximity sensor (original irs05a version). |
|---|
So, you can imagine how excited I was to find out about Vishay’s new IR modules designed specifically for sensor applications. They have two basic versions: one with a fixed gain that is constantly super-sensitive, and another one with a predictably-varying AGC that lets you know how bright the incident IR is. We used the fixed-gain units on the IR proximity sensors we released earlier this year, and we plan to make more products that use these unique sensors. In the meantime, we are happy to offer the through-hole versions of these sensors so you can start playing around with them to make your own sensor systems. Here are the two parts:
- The Vishay TSSP58038 has a fixed high gain setting, so it responds predictably and can detect a continuous modulated signal.
- The Vishay TSSP58P38 includes automatic gain control – but it is tuned to provide a usable measurement of the strength of the detected signal. When configured as a reflective proximity sensor, its output is a pulse with a width that depends almost linearly on the distance to the target.
Those IR proximity sensors I mentioned earlier work nicely with these new sensors since our boards include a high-brightness LED with a 38 kHz modulation circuit, so you can use several of those with these new IR detectors to make sophisticated sensing solutions in which you enable one emitter at a time and monitor the reflections with all the other sensors.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










