Pololu Blog » User Profile: Kevin »
Posts by Kevin
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New products: Motoron M3T453 Triple I²C Motor Controllers
|
|


We’re pleased to announce the release of our new Motoron M3T453 triple motor controllers. These compact boards make it easy to independently control up to three DC motors through an I²C interface; they support motor supply voltages from 4.5 V to 44 V and can supply up to 0.8 A per channel.
Four M3T453 versions are available to provide different connector options:
M3T453 with JST SH-style connectors: |
M3T453 with 0.1″-pitch through-holes: |
||
|
|


Since you can connect multiple Motoron controllers to the same I²C bus, these little modules are hard to beat for applications where you need to drive lots of small motors. In particular, the versions with JST SH-style connectors allow you to make all your motor connections modular and detachable when combined with our 2-pin JST SH-style cables and JST SH-Style Connector Board for Micro Metal Gearmotors.
Introductory special discount! Use coupon code M3T453INTRO to get any version for $14.95 each.
Related products




New product: A89301-Based Sensorless Brushless Motor Controller, 50V, 11A
 |
 |
Yes, you read that right: brushless! We’re excited to finally announce our A89301-Based Sensorless Brushless Motor Controller, 50V, 11A, our first board designed to control a brushless DC motor.
Pololu has never offered any BLDC motor drivers or controllers until now (we’ve had stepper motor drivers for a long time, but that’s typically not what people mean when they ask for a brushless motor driver), and I think it’s easier to appreciate some of our reasons for this if you look into their principles of operation.
A brushed DC motor can easily be driven with a simple direct current produced from a constant voltage, and its speed can be controlled by varying that voltage proportionally (or by using PWM, which effectively produces a lower average voltage). This is because it has a commutator and some contacts, or “brushes”, that switch the direction of the current in the windings as they rotate inside a fixed magnetic field, and that maintains a steady torque on the motor shaft to keep it spinning. Consequently, the simplest brushed DC motor drivers are not much more than amplifiers that turn low-voltage, low-current control signals into higher power outputs capable of driving a motor.
By contrast, the construction of a brushless DC motor is relatively simple. The coils are located on the fixed part of the motor (stator) and are directly connected to the motor’s terminals, and the magnets are on the rotating part (rotor) instead. Eliminating the brushes and commutator accounts for some of the advantages of brushless motors, including higher efficiency (partly due to less friction) and longer lifetimes (fewer parts to wear out) compared to brushed motors. The trade-off for this reduced mechanical complexity is increased control complexity: something else now has to switch the coil currents appropriately to maintain a steady torque on the rotor, and that is the responsibility of the brushless motor driver.
 |
A pair of disassembled DC motors. Brushed motor (left): end cap with brushes, rotor with coils and commutator, case with fixed magnets. Brushless outrunner motor (right): rotor with magnets and case, stator with coils. |
|---|
In order to produce torque, a motor’s windings must generate magnetic forces tangential to the axis of rotation. (I saw an analogy that compares this to using a wrench: you can torque a bolt by applying a tangential force to the wrench handle, but pushing or pulling on the wrench parallel to the handle doesn’t do anything useful.) Since a brushless motor’s magnets rotate, the fixed coils’ magnetic fields must also rotate to keep acting on the rotor tangentially, and this means the coils need to be energized in a rotating sequence.
The simplest way to do this is with an open-loop technique that simply drives the brushless motor using a sequence with fixed timing. However, for better reliability and efficiency, it is helpful to know the actual position of the rotor so that the timing of the sequence can be adjusted accordingly. There are two approaches to doing this, each with their own upsides and downsides: sensored control relies on a position sensor in the motor (like an encoder) to directly measure its position, while sensorless control uses the back-EMF (electromotive force) induced on the coils by the motor’s rotation to calculate its position.
I hope this brief overview conveys some of the additional considerations that are involved in making a brushless DC motor control system. This complexity, and the wide range of electronic parts released by various manufacturers to address it, means that it’s been hard for us to decide on a direction to take when it came to trying to design our own brushless driver or controller. Another factor was that we don’t sell any brushless motors (yet), which made it kind of a chicken-and-egg problem: does it make sense for us to develop a brushless driver when we have no brushless motors, and does it make sense for us to source brushless motors to sell when we have nothing to drive them?
 |
Of course, to resolve that dilemma, you have to start with one or the other, and Allegro offering development support for their A89301 brushless DC gate driver IC made it an easy decision for us to move forward with a board for it. Our A89301-Based Sensorless Brushless Motor Controller, 50V, 11A combines the A89301 with external MOSFETs to enable sensorless control of 3-phase BLDC motors at voltages from 5.5 V to 48 V and with phase currents up to 11 A. The A89301 uses a fully-integrated field-oriented control (FOC) algorithm that computes the exact position of the rotor so that the coil currents can be controlled accordingly, optimizing torque and efficiency. It accepts speed inputs via analog voltage, PWM duty cycle, pulse frequency, or I²C signals to simplify the process of getting a brushless motor running without having to write your own complex low-level motor control code. We offer versions with soldered header pins and terminal blocks or without through-hole connectors.
Introductory special discount! Use coupon code A89301INTRO to get either version for $19.95 each.
To make use of all of the A89301 IC’s features and settings, including lock (stall) detection and multiple motor startup options, it needs to be configured through I²C. Our board’s 4-pin I²C connector (Qwiic and STEMMA QT compatible) makes it easy to connect it to one of our USB-to-I²C Adapters and use the Pololu A89301 Configuration Utility software for Windows (based on Allegro’s own evaluation board software) to interface with the A89301.
 |
The Pololu A89301 Configuration Utility software. |
|---|
 |
An A89301-Based Sensorless Brushless Motor Controller connected to a computer with a Pololu Isolated USB-to-I²C Adapter (IOREF shorted to 2V8). |
|---|
This is our first brushless motor control solution, and we definitely don’t intend it to be our last. While we have plans for other products, we’re also interested in hearing from you: What are you looking for in a BLDC motor system? What kinds of brushless motors, drivers, and controllers would you like to see us offer?
Related products


New products: Pololu Isolated Solid State Relay/Switch, SPST
 |
We’re happy to announce our new Isolated Solid State Relay/Switch boards! These modules function as solid state, single-pole, single-throw (SPST) relays or switches that can be controlled by low-current signals between 2.7 V and 40 V. The control signal activates an optically coupled driver that turns on a pair of output MOSFETs, which keeps the outputs electrically isolated from the input side. The MOSFETs are arranged back-to-back to make the outputs symmetric and bidirectional (so the board can be used as a high-side or low-side switch).
 |
These boards make good replacements for mechanical relays in many situations, since their semiconductor-based design allows them to avoid problems like contact wear and arcing that limit the service life of mechanical relays. They are also silent and generally much smaller than a typical mechanical relay with a comparable current rating. Two versions of the solid state relay/switch are available with different voltage and current capabilities:
- Pololu Isolated Solid State Relay/Switch, SPST, 30V, 11A
- Pololu Isolated Solid State Relay/Switch, SPST, 60V, 7A
 |
Three-wire and two-wire (with EN and VIN tied together) control options for the Pololu Isolated Solid State Relay/Switch, SPST (60V version shown). |
|---|
Introductory special discount! Use coupon code SSRELAYINTRO to get either version for $3.50 each.
Related products


New products: D30V3x series step-down voltage regulators
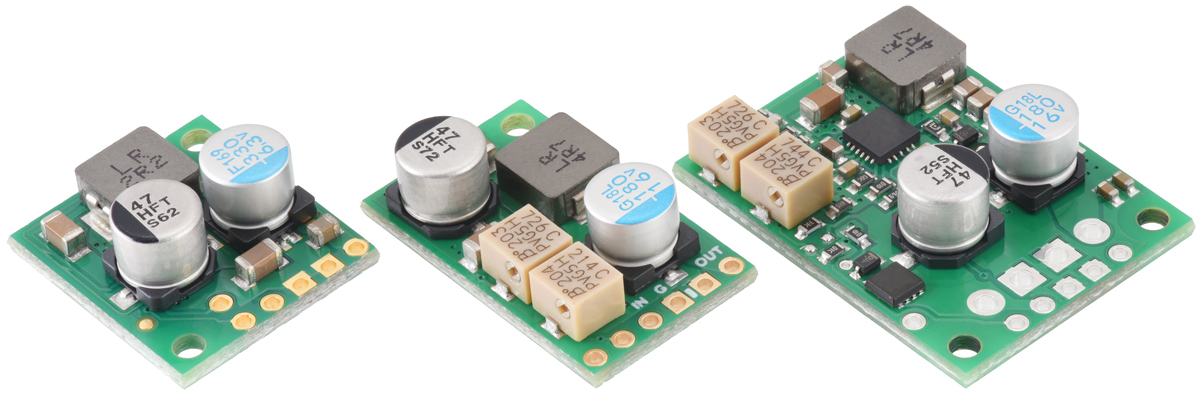 |
We’re pleased to introduce the D30V3x line of step-down voltage regulators, our favorite new buck regulators for applications that need up to a few amps from input voltages up to 45 V. They can deliver between 1 A and 4 A of output current, depending on the input and output voltages, with very low dropout voltages. They also feature a power-good output for identifying when the output voltage is not being maintained, an enable pin with a precise threshold for turning off the regulator, and a soft-start feature that limits in-rush current and gradually ramps the output voltage on startup. The regulators include protections against reverse voltage (up to 40 V), input under-voltage, over-temperature, over-current, and short circuits.
 |
 |
 |
The D30V3x line consists of the following three families:
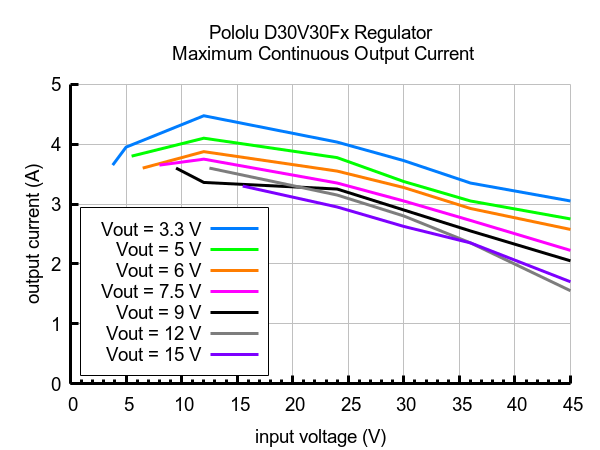
- The D30V30Fx regulators are compact, fixed-output versions available with output voltages from 3.3 V to 15 V.
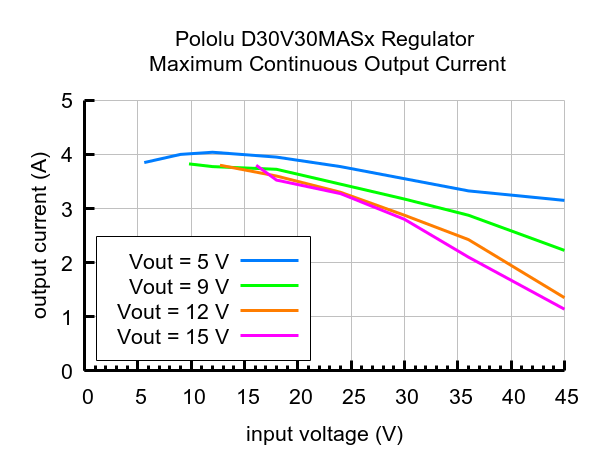
- The D30V30MAx regulators are compact, double-sided adjustable versions, with a precision-adjustable output voltage from 4.2 V to 15 V and an optional adjustable low-voltage cutoff.
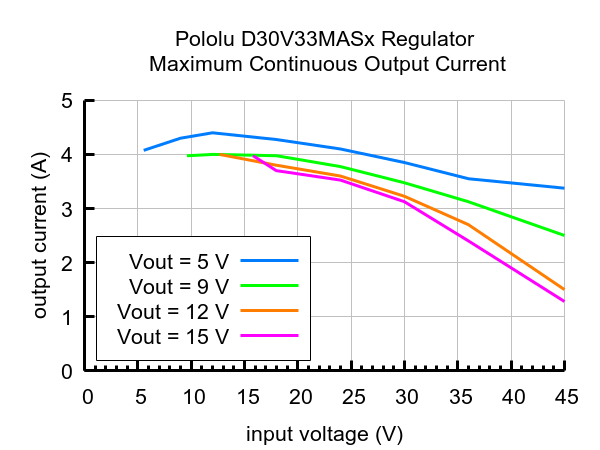
- The D30V33MAx regulators are larger adjustable versions with holes for terminal blocks and slightly higher maximum output current. These also have a precision-adjustable 4.2 V to 15 V output and an optional adjustable low-voltage cutoff.
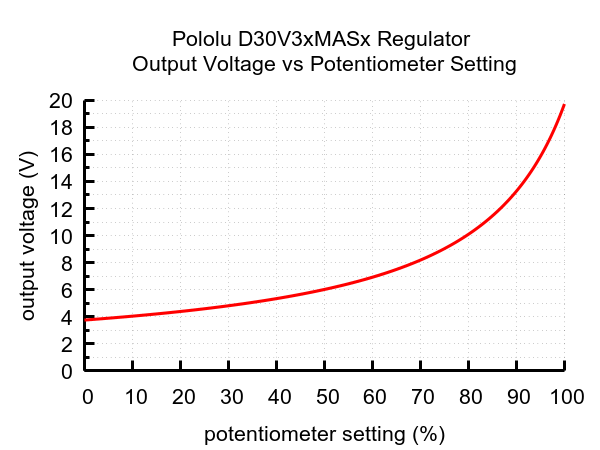 |
Output voltage settings for the 4.2-15V Fine-Adjust Step-Down Voltage Regulator D30V3xMASx. |
|---|
We’ve actually had the fixed-voltage versions available for a few months already, but we’ve just expanded the range with the release of the adjustable versions, which have multi-turn potentiometers for precisely setting the output voltage and/or low voltage cutoff. The following table shows all of the members of the D30V3x family:
| Regulator | Output voltage | Typical max output current1 |
Input voltage2 | Adjustable low-voltage cutoff |
Size | |
|---|---|---|---|---|---|---|
| #4891: D30V30F3 | 3.3 V | 3.7 A | 3.3 V – 45 V | 0.7″ × 0.8″ | ||
| #4892: D30V30F5 | 5 V | 3.4 A | 5 V – 45 V | |||
| #4893: D30V30F6 | 6 V | 3.3 A | 6 V – 45 V | |||
| #4894: D30V30F7 | 7.5 V | 3 A | 7.5 V – 45 V | |||
| #4895: D30V30F9 | 9 V | 2.9 A | 9 V – 45 V | |||
| #4896: D30V30F12 | 12 V | 2.8 A | 12 V – 45 V | |||
| #4897: D30V30F15 | 15 V | 2.7 A | 15 V – 45 V | |||
| #4874: D30V30MASCMA | 4.2 V – 15 V | 3 A | 4.2 V – 45 V | 0.6″ × 1.0″ | ||
| #4875: D30V30MAS | ||||||
| #4854: D30V33MASCMA | 4.2 V – 15 V | 3.3 A | 4.2 V – 45 V | 0.9″ × 1.2″ | ||
| #4855: D30V33MAS | ||||||
| 1At 30 V in. Actual achievable continuous output current is a function of input and output voltages and is limited by thermal dissipation. | ||||||
| 2Operating voltage must be higher than the set output voltage and is subject to dropout voltage considerations. | ||||||
New product: Zumo 2040 Robot!
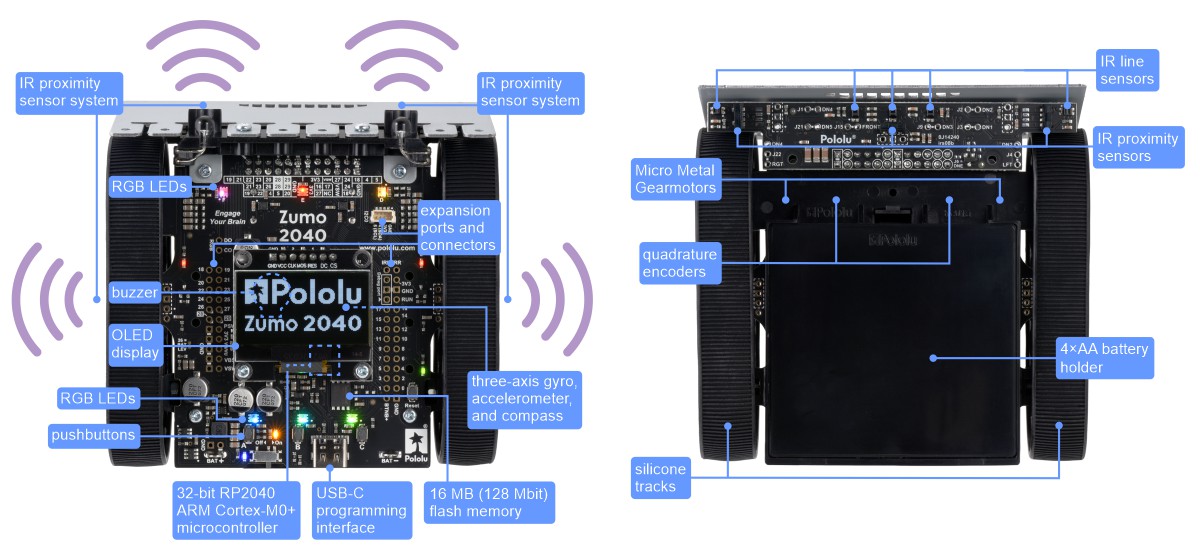 |
We’re happy to announce the release of the Zumo 2040, our newest RP2040-based robot built on our Zumo tracked chassis!
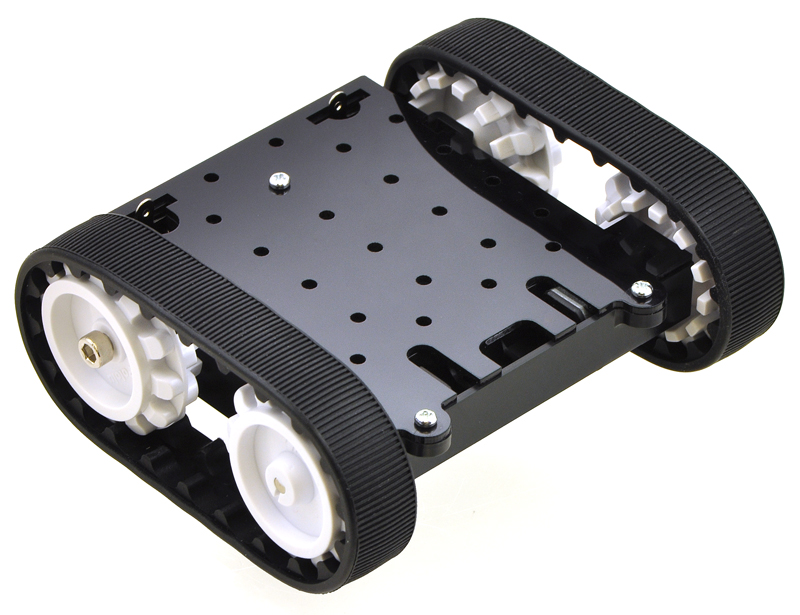
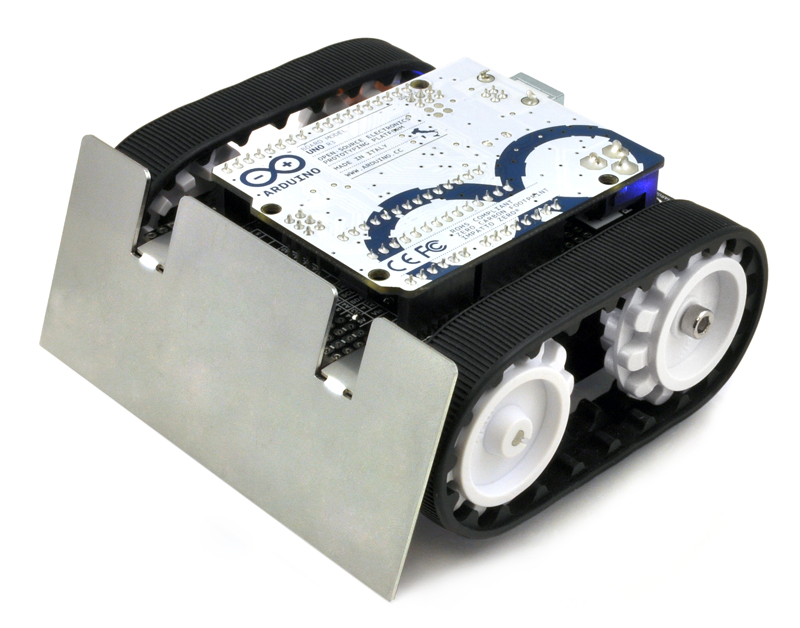
The Zumo started out as just that chassis: a simple mechanical base designed to be the foundation of a small tracked robot (and the right size for Mini-Sumo competitions). Later, we made the Zumo Robot Kit for Arduino that lets you build a complete robot with just the addition of an Arduino board, and a while after that, we released the Zumo 32U4 featuring a main board with an integrated AVR microcontroller.
|
|
|
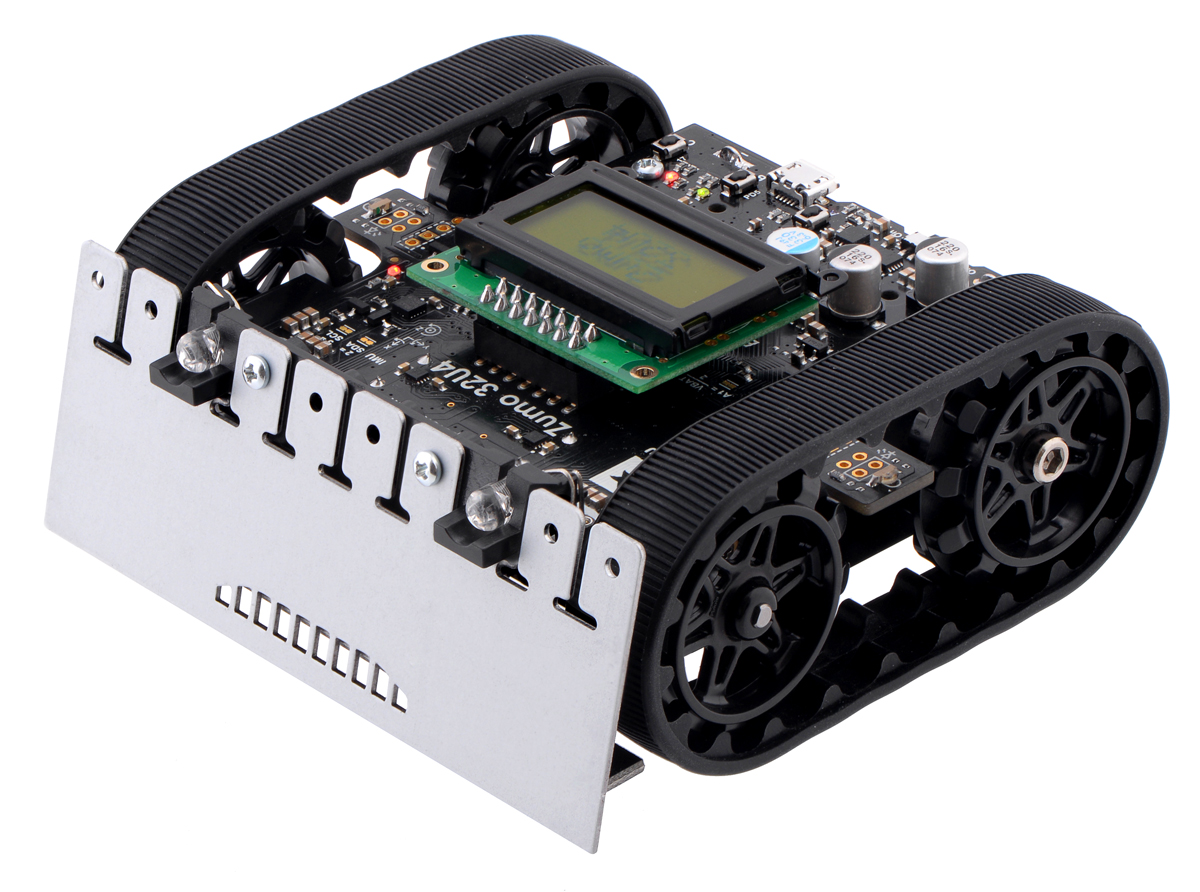
This new Zumo 2040 is the next big step in the evolution of the Zumo family, swapping out the Zumo 32U4’s 8-bit processor for a Raspberry Pi RP2040, a 32-bit dual-core Arm Cortex-M0+ microcontroller running at 125 MHz, along with 16 MB (128 Mbit) of flash memory. The more powerful processor (the same as on the Raspberry Pi Pico) enhances both what the Zumo can do and how you can work with it.
 |
Assembled Zumo 2040 robot. |
|---|
We particularly like how easy it is to get started programming the Zumo 2040 with MicroPython: just like with our 3pi+ 2040 Robot, you can simply connect the Zumo to a computer with a USB-C cable and start editing the included example Python programs with a text editor.
|
|

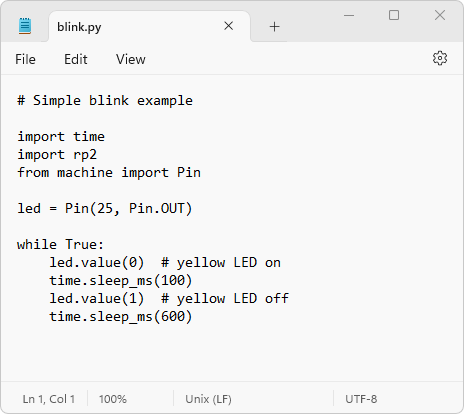
There are lots of pre-loaded examples that demonstrate how to use the various features on the Zumo 2040. Here’s one that uses the Zumo’s proximity sensors to locate and turn to face an opponent or other object (in this case, a 3pi+):
Although I summed up the history of the Zumo platform in a few major milestones above, that doesn’t really tell the whole story; there have been other smaller changes along the way (both accompanying and between the big releases) that have made it more of a continual process of improvement. For example, although the Zumo originally came with the white sprockets that you see in some of those pictures, we now ship the chassis and all of the robots and kits with black spoked sprockets that make assembly and disassembly easier (and look cooler). And a couple years ago, we revised the Zumo 32U4 with a better display (in the form of the Zumo 32U4 OLED), an upgrade that has carried over to this new Zumo.
The Zumo 2040’s new I2C0 connector is one such smaller improvement, but it’s something that I hope will make a difference when it comes to expanding the robot with additional electronics. This is a 4-pin JST SH-compatible connector that provides access to the RP2040’s I2C0 bus, and it has a pinout compatible with Sparkfun’s Qwiic and Adafruit’s STEMMA QT connection systems, so that should make it easier to add I²C sensors and other devices to the Zumo.
|
|

The Zumo 2040 robot is available as a kit (with motors not included so you can select your own to customize performance) or as a fully assembled robot with your choice of 50:1, 75:1, or 100:1 motor options.
Related products


New product: LOCOSYS LC20031-V2 135-Channel Dual-Band GNSS Receiver Module
 |
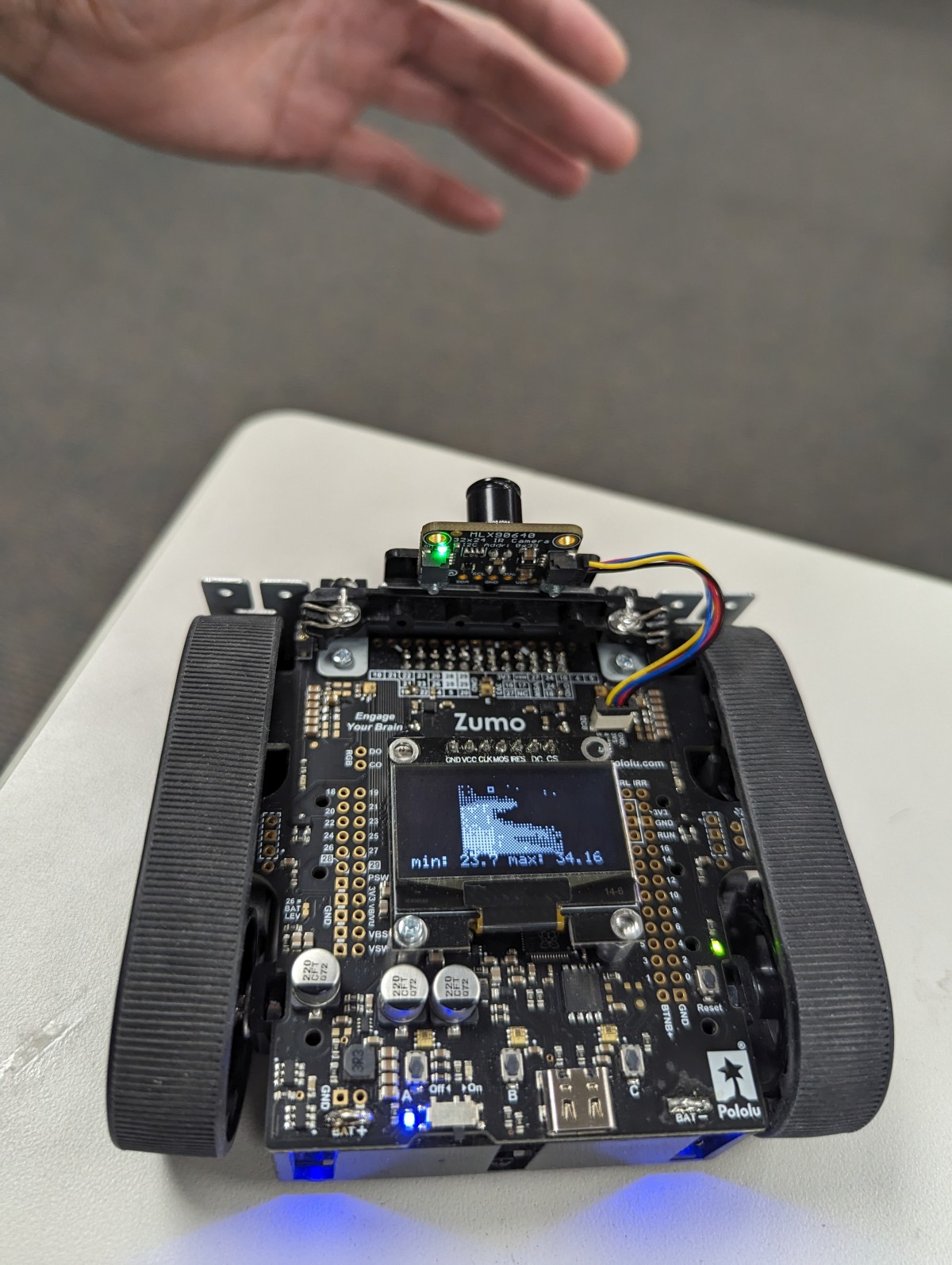
We’re now selling the LC20031-V2 GNSS receiver module from LOCOSYS. This module integrates a global navigation satellite system (GNSS) receiver with an on-board antenna, making it a complete solution for providing satellite-based position data (a “smart antenna”).
The LC20031-V2 outputs data at up to 10 Hz as NMEA sentences on a TTL-level serial port, or UART, and the module ships with a cable assembly that you can use to connect it to your project (either with a matching receptacle or by cutting off the connector to access the individual wire leads). A built-in rechargeable battery preserves system data while the module is inactive for rapid satellite acquisition on the next start-up.
Unlike GPS-only receivers such as the LS20031, the LC20031-V2 works with many different satellite systems. GPS, GLONASS, BeiDou, Galileo, and QZSS satellite signals are all supported, and the module can receive both L1 and L5 frequency band signals on up to 135 channels. This lets it achieve a typical position accuracy of 1.5 m CEP (circular error probable).
The GNSS Firebird software provided by LOCOSYS can be used to configure the LC20031-V2 and view its output. In this screenshot, you can easily see the different satellite systems that the receiver is tracking, represented by the different colors in the displays (GPS is blue, GLONASS is orange, Galileo is green, and BeiDou is red).
 |
GNSS Firebird application showing data from an LC20031-V2 module inside Pololu’s offices. |
|---|
Related products

New products: Motoron M2T256 (I²C) and M2U256 (UART) dual motor controllers
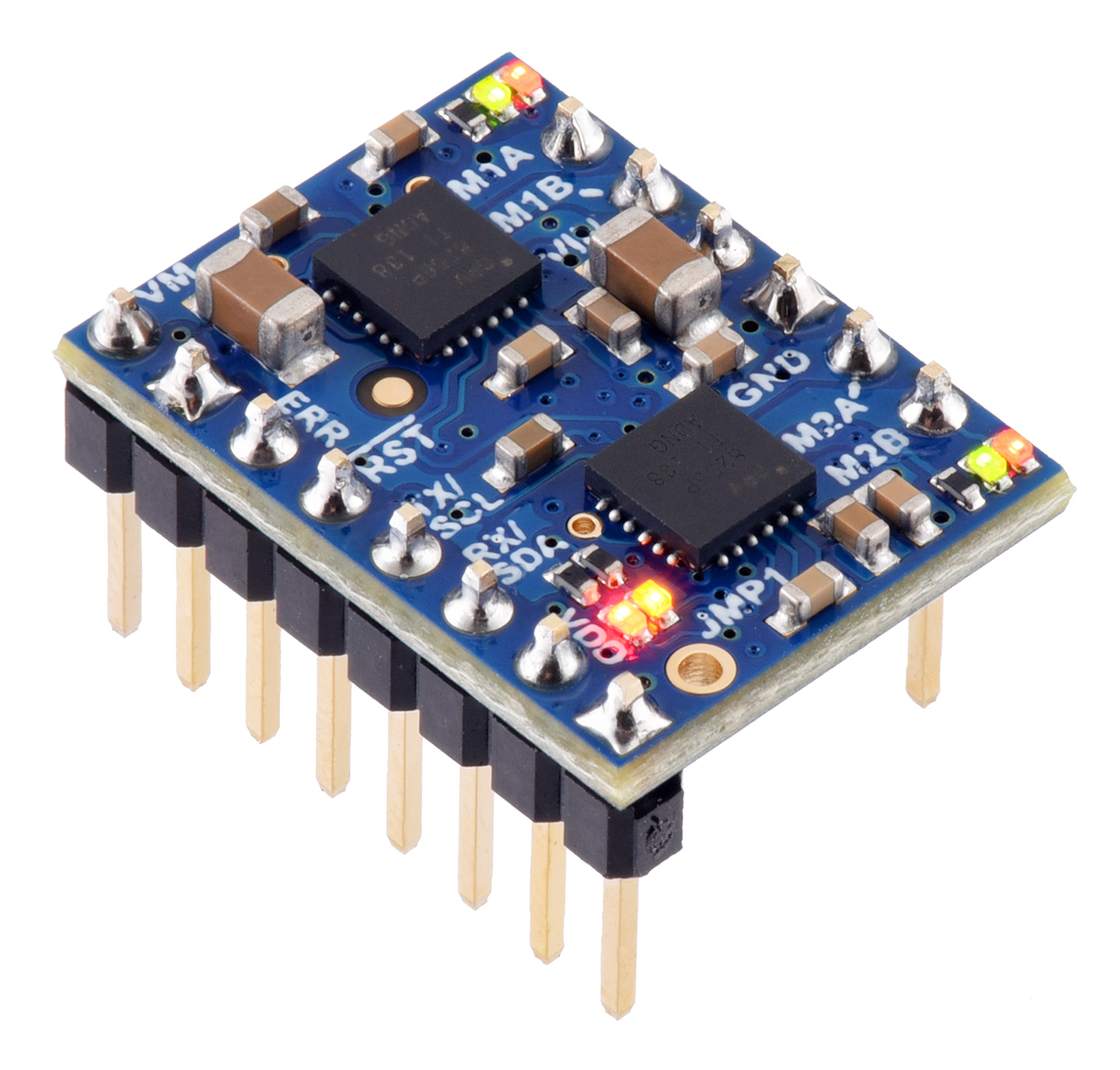 |
The Motoron family keeps growing! We’re happy to announce the release of the Motoron M2T256 Dual I²C Motor Controller and the Motoron M2U256 Dual Serial Motor Controller. Unlike previous Motoron controllers, these boards are “micro” versions that fit the ability to drive two motors (at up to 48 V and 1.8 A) into a minimal, compact form factor. They have the same ability to be individually addressed as the other Motorons, allowing many of them to be controlled independently while connected to the same bus.
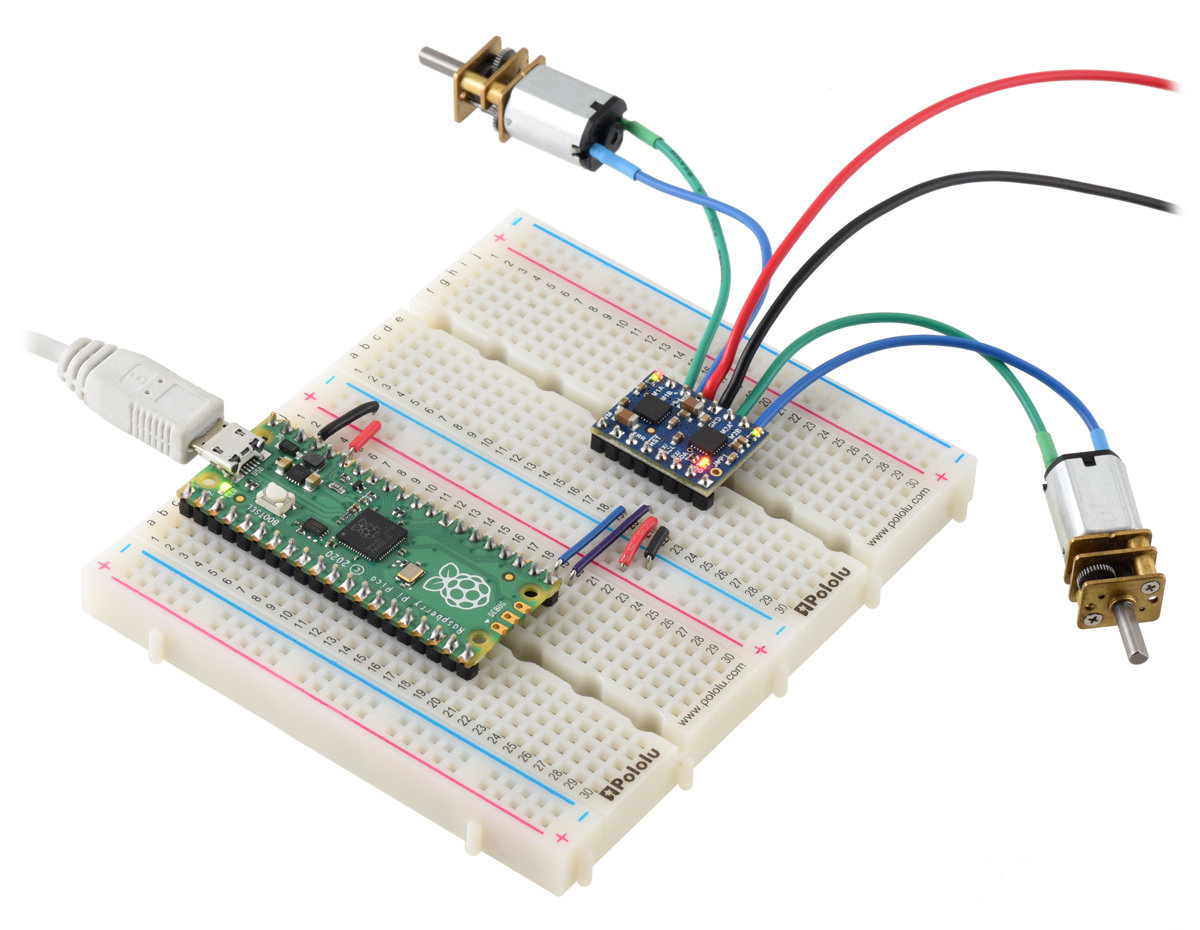 |
A Raspberry Pi Pico on a breadboard using a Motoron M2T256/M2U256 Dual Motor Controller to control two motors. |
|---|
The M2T256 is controlled via I²C like all of our previous Motorons, but unlike all the others, the M2U256 offers logic-level serial (UART) communication to provide an alternative option for applications where an asynchronous serial interface is preferred. The M2U256 supports the Pololu serial protocol, letting it share a serial line with our other compatible serial controllers (including brushed motor controllers, stepper motor controllers, and servo controllers). Its firmware also includes some options that can help you use it on an RS-485 network (requires addition of external transceivers).
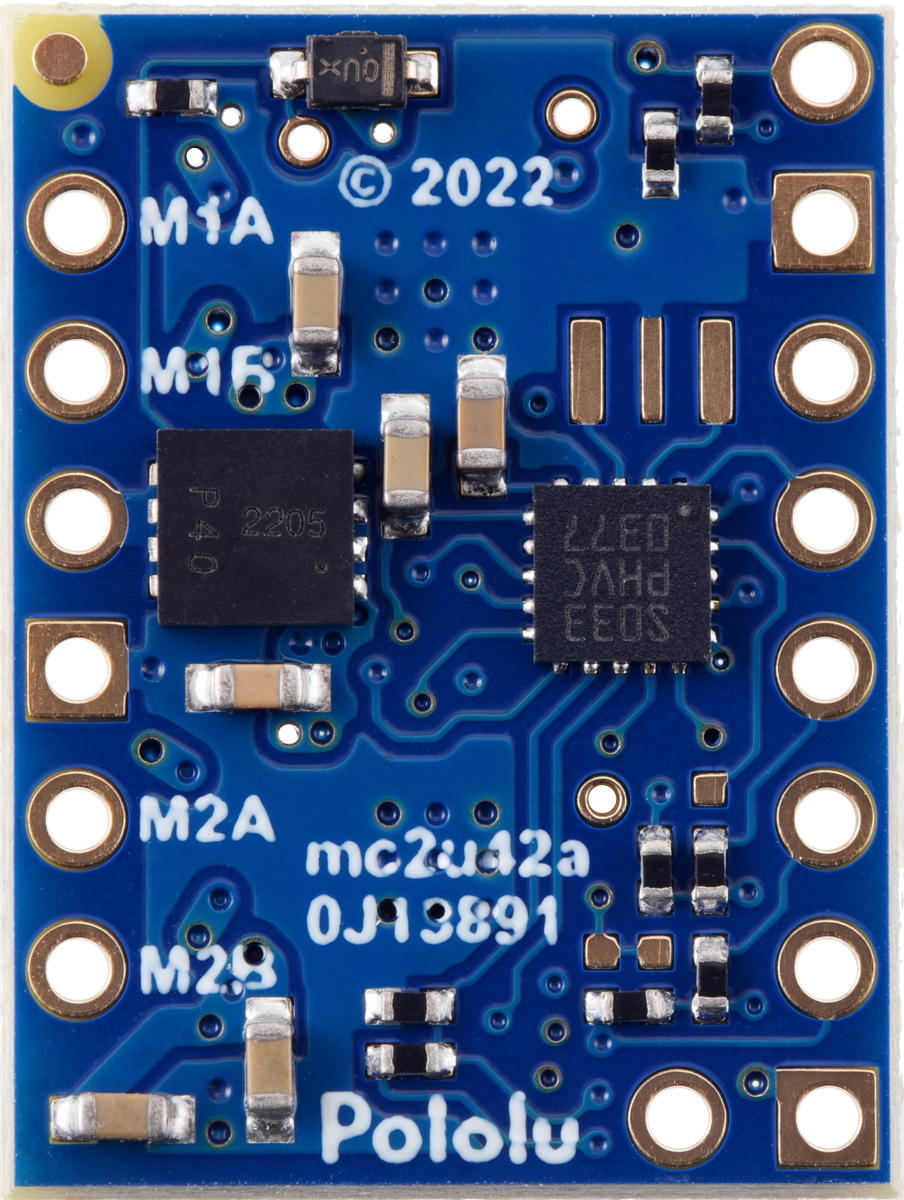
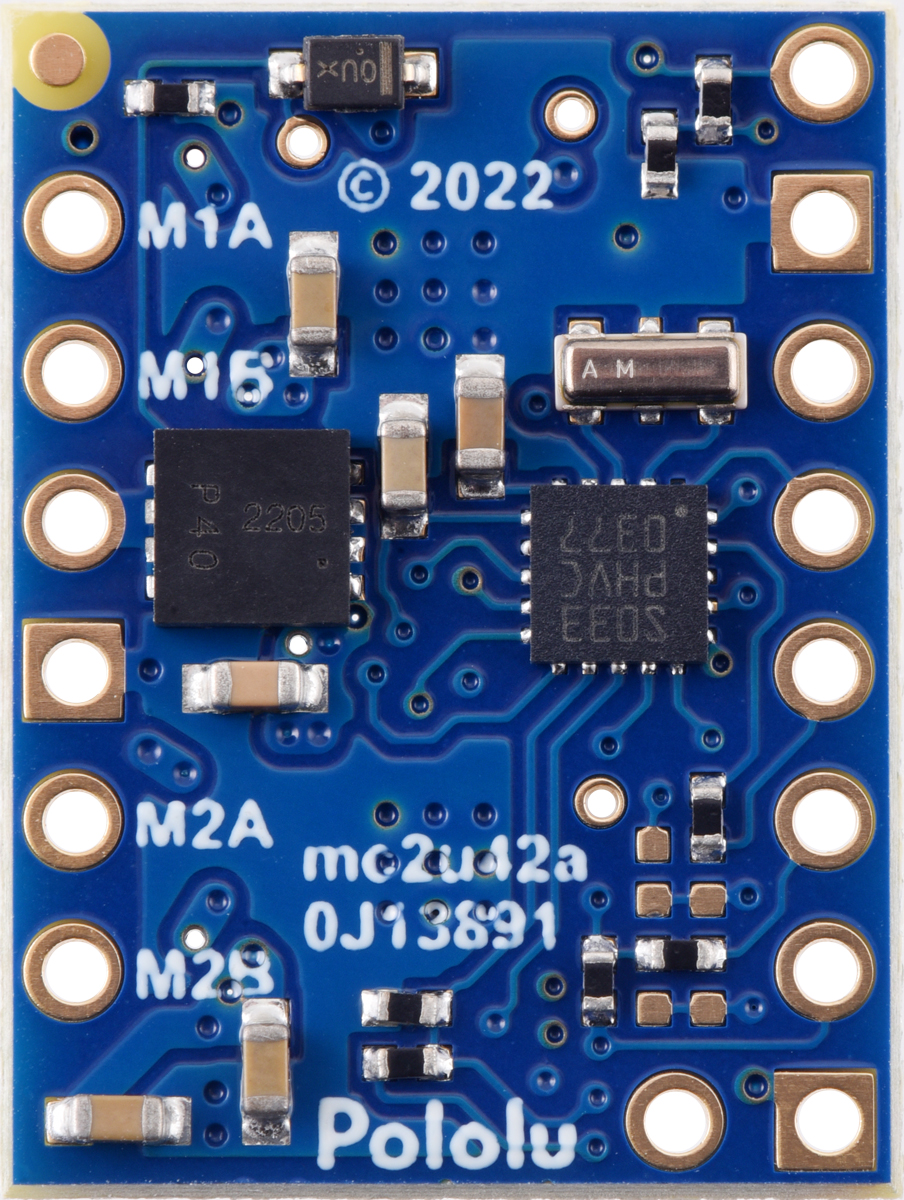
The M2T256 and M2U256 both measure only 0.6″ × 0.8″ and have nearly the same pinout; in fact, both of these Motoron versions use the same printed circuit board with only minor differences in components. (For example, a resonator is only present on the M2U256 because it needs more accurate timing for asynchronous serial communication.) Both versions are available either with header pins soldered in or with headers included but not soldered.
|
|
The Motoron M2U256 is the latest in a succession of compact motor controllers we’ve produced over the years that use an asynchronous serial (UART) protocol, beginning with one of our very first products, the Pololu Dual Serial Motor Controller. Using this interface made a lot of sense in the past because it was one of the most straightforward ways to communicate with devices using higher-level commands. However, some of the most popular embedded platforms today make it difficult: many Arduino boards use the UART for serial programming, which can conflict with other connected devices, and a Raspberry Pi can output bootloader messages over serial or unexpectedly scale its UART frequency along with its CPU speed.
Meanwhile, I²C has become more popular and easier to use on microcontrollers over time, and it has features like open-drain lines and built-in support for addressing that simplify working with several devices on a single bus. This was the reason for the Motoron family’s initial focus on I²C, which was a departure from our tradition of making serial motor controllers, but the M2U256 reflects our thinking that there are still some reasons to use asynchronous serial. For example, it’s still easier to connect a PC to a serial device (with a USB or RS-232 adapter) than to an I²C device. We expect to make more UART Motorons in the future, too.
|
|
|
Here is our full lineup of Motoron controllers to date, encompassing both the new “micro” boards and the previously-released expansion boards for Arduino and Raspberry Pi:
| Motoron motor controllers micro versions |
||
 M2T256 |
M2U256 |
|
|---|---|---|
| Control interface: | I²C | UART serial |
| Motor channels: | 2 (dual) | |
| Absolute max input voltage: |
48 V | |
| Recommended max nominal battery voltage: |
36 V | |
| Max continuous current per channel: |
1.8 A | |
| Available versions: | ||
| Motoron motor controllers Arduino and Raspberry Pi form factor versions |
|||||
 M3S256  M3H256 |
 M2S24v14  M2H24v14 |
 M2S24v16  M2H24v16 |
 M2S18v18  M2H18v18 |
 M2S18v20  M2H18v20 |
|
|---|---|---|---|---|---|
| Control interface: | I²C | ||||
| Motor channels: | 3 (triple) | 2 (dual) | |||
| Absolute max input voltage: |
48 V | 40 V | 30 V | ||
| Recommended max nominal battery voltage: |
36 V | 28 V | 18 V | ||
| Max continuous current per channel: |
2 A | 14 A | 16 A | 18 A | 20 A |
| Available versions for Arduino: |
M3S256 | M2S24v14 | M2S24v16 | M2S18v18 | M2S18v20 |
| Available versions for Raspberry Pi: |
M3H256 | M2H24v14 | M2H24v16 | M2H18v18 | M2H18v20 |
Related products


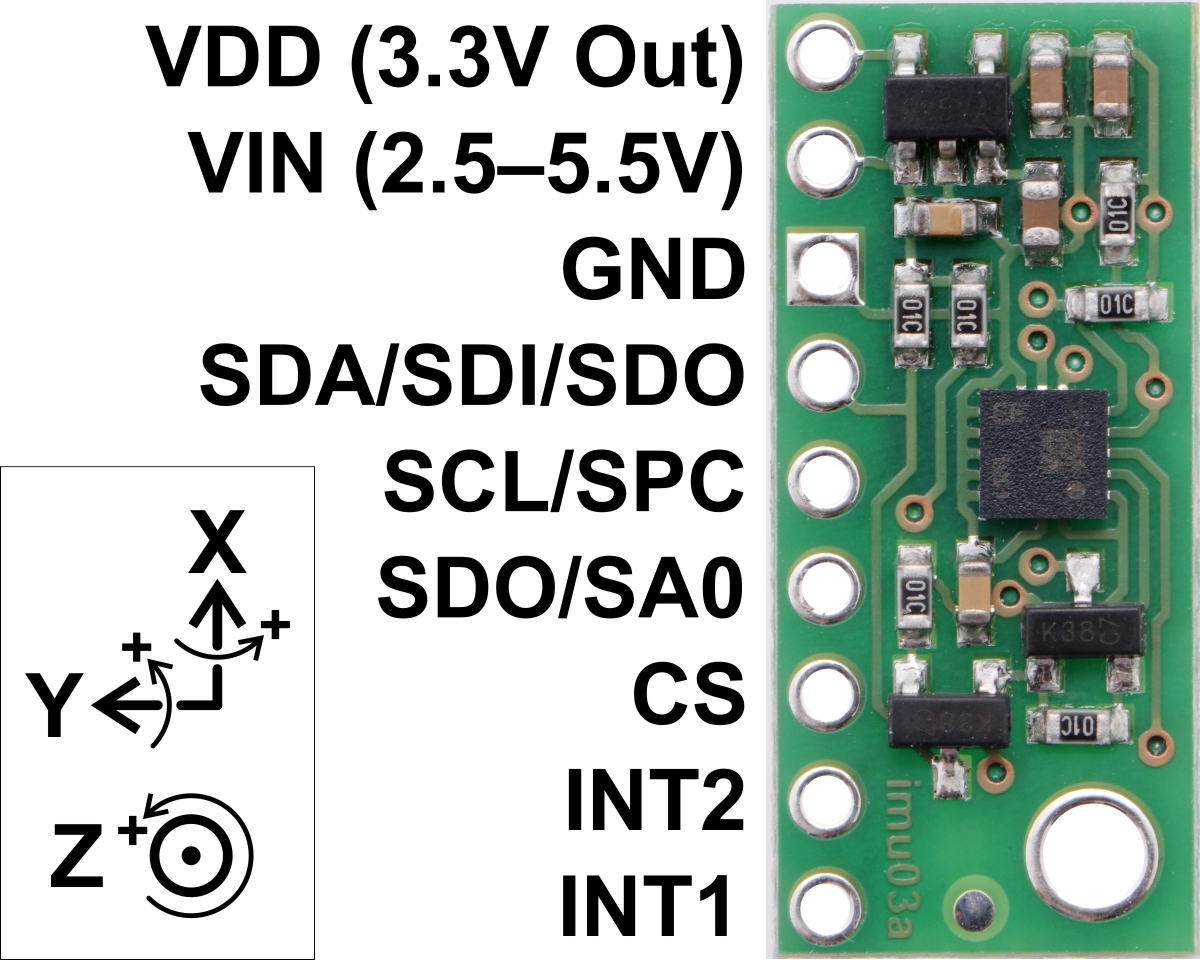
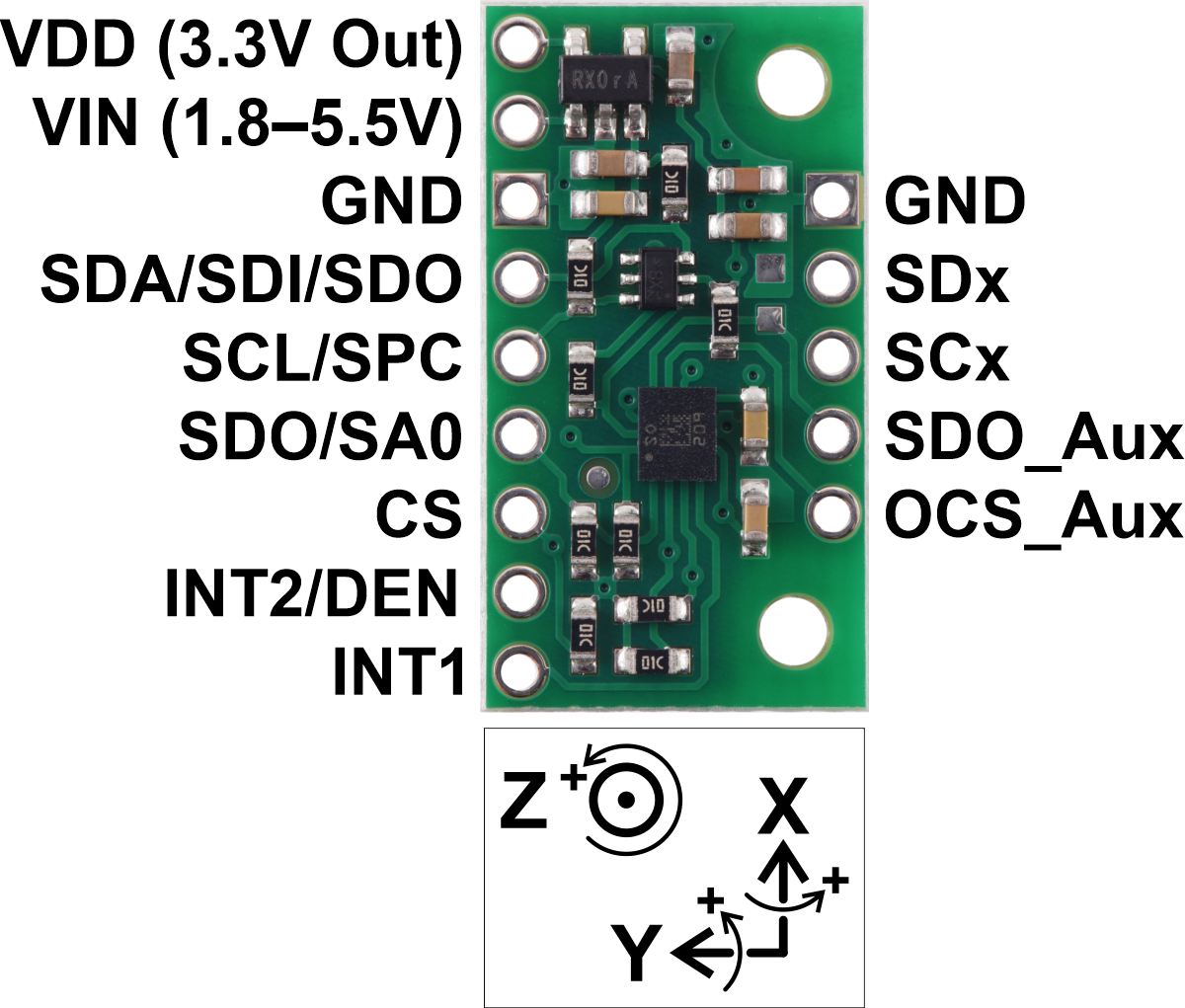
New product: LSM6DSO 3D Accelerometer and Gyro Carrier
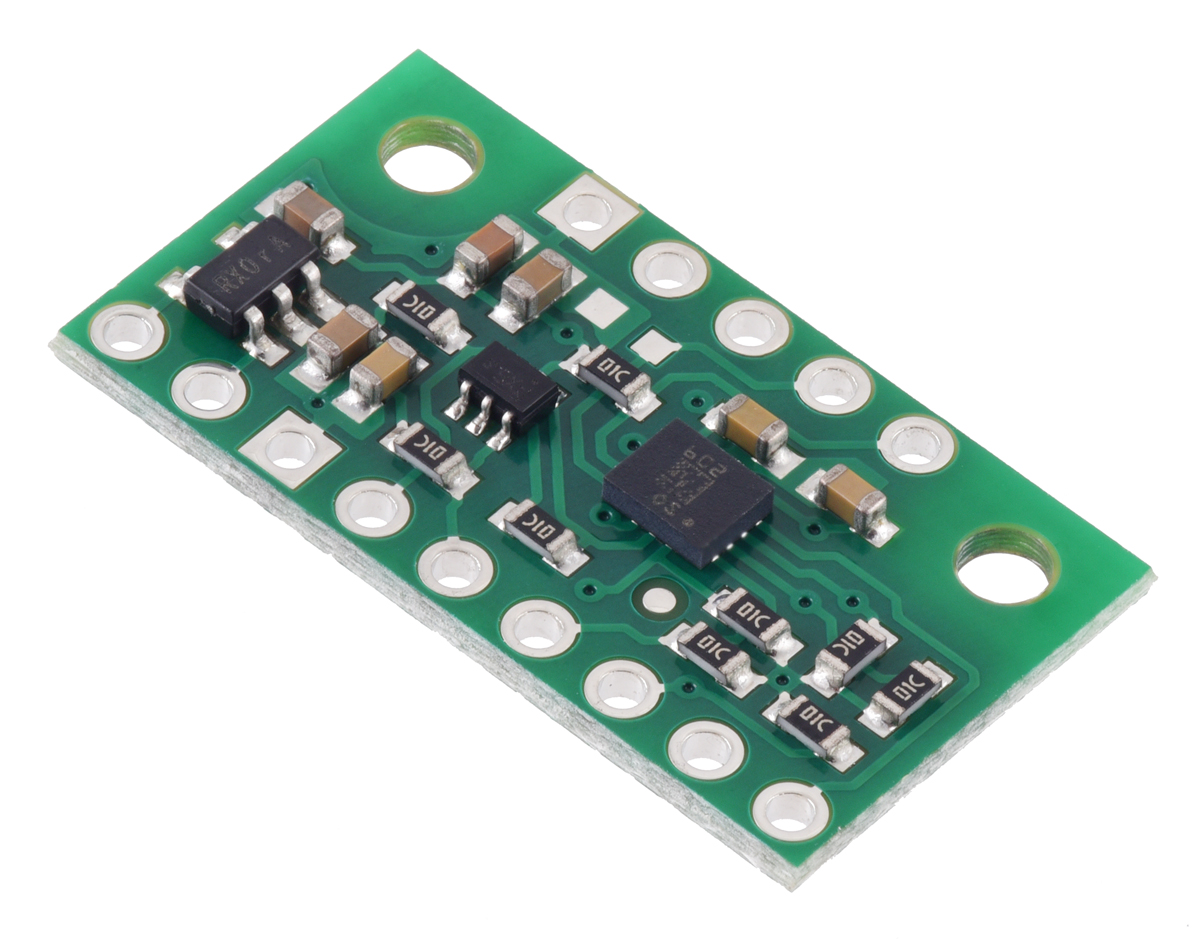 |
We’ve just released a new LSM6DSO 3D Accelerometer and Gyro Carrier! ST’s LSM6DSO is a combination of a 3-axis accelerometer and 3-axis gyroscope into a single chip, offering acceleration and rotation rate readings in the ranges of ±2 g to ±16 g and ±125°/s to ±2000°/s through I²C or SPI. This board is mostly an update of our older LSM6DS33 carrier that had most of the same capabilities, although the LSM6DSO features a number of improvements over its predecessor, like lower noise, a higher maximum output data rate for the gyro, and the option to use MIPI I3C (a communication standard intended as an advanced, but backward-compatible, replacement for I²C).
The LSM6DSO additionally supports operation in specialized modes with a secondary interface, allowing it to act as a master (sensor hub) on a second I²C bus or provide an auxiliary SPI slave interface that is useful for image stabilization applications. We’ve increased the width of the carrier board to 0.5″ to bring out those secondary interface pins and let it plug into a breadboard nicely:
|
|
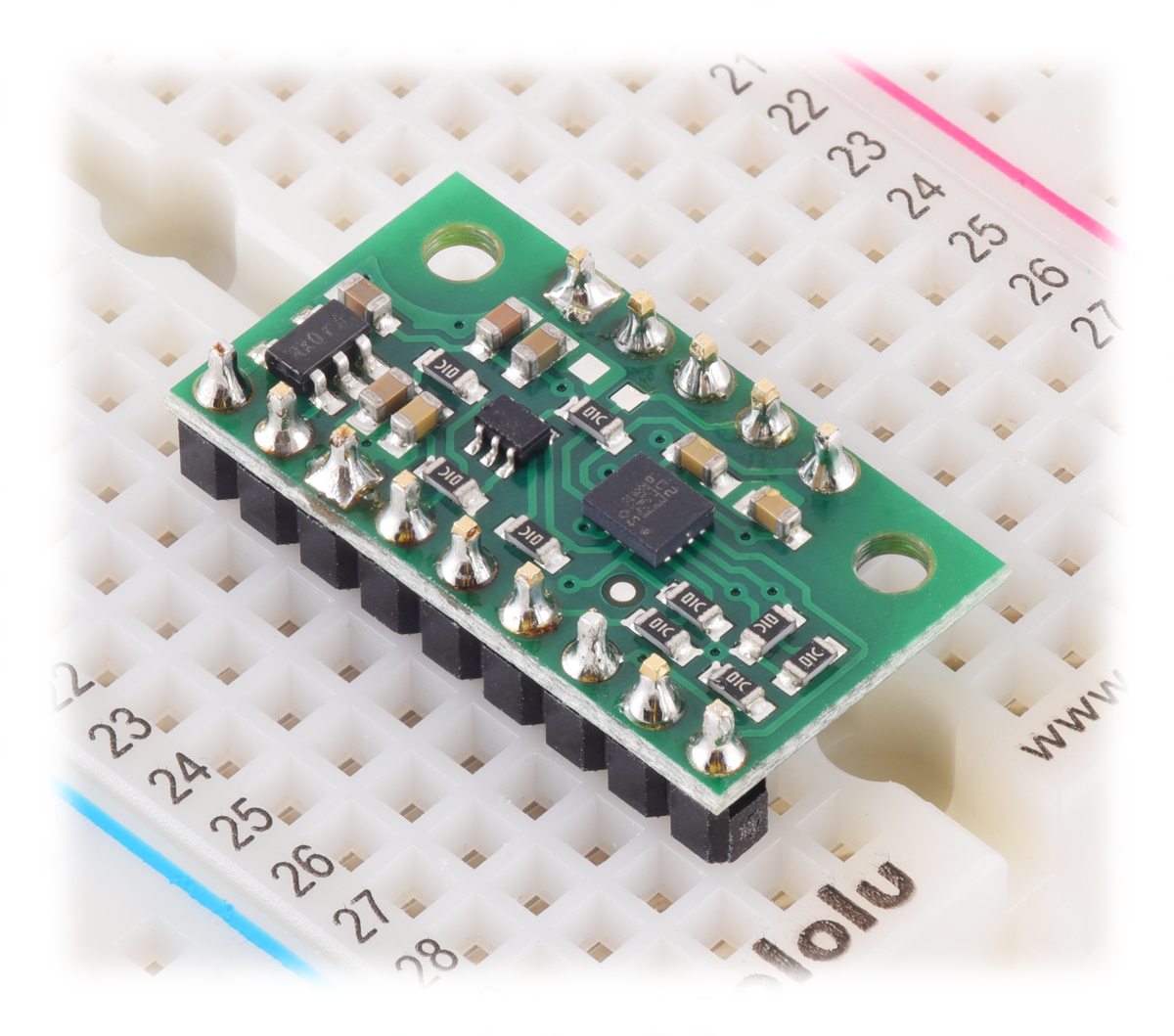 |
LSM6DSO 3D Accelerometer and Gyro Carrier with Voltage Regulator in a breadboard. |
|---|
Other than the extra pins and the different mounting holes, our LSM6DSO board is pretty much a drop-in replacement for the LSM6DS33 board. We’ve updated our LSM6 Arduino library to support the new chip too, so any code that was written for the LSM6DS33 can probably be modified to work with an LSM6DSO without too much trouble.
Related products

New products: Motoron dual high-power motor controllers
 |
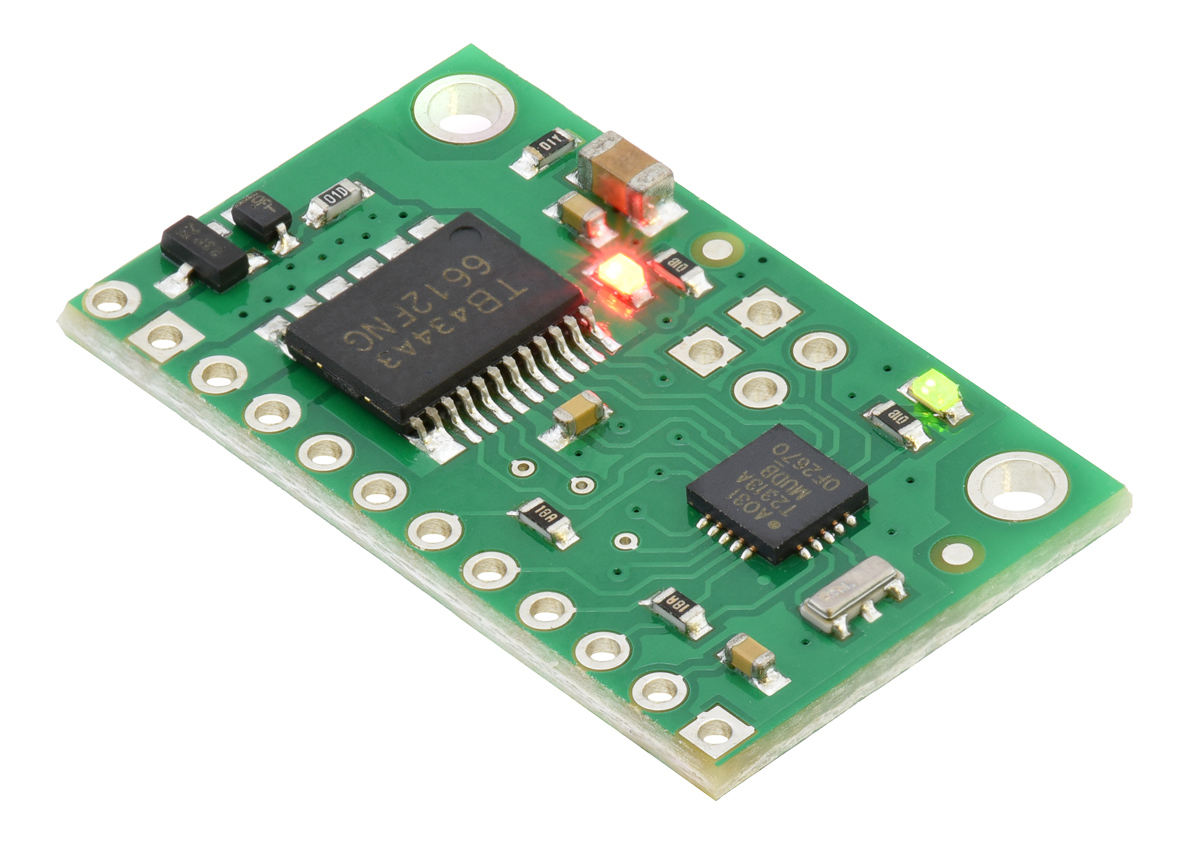
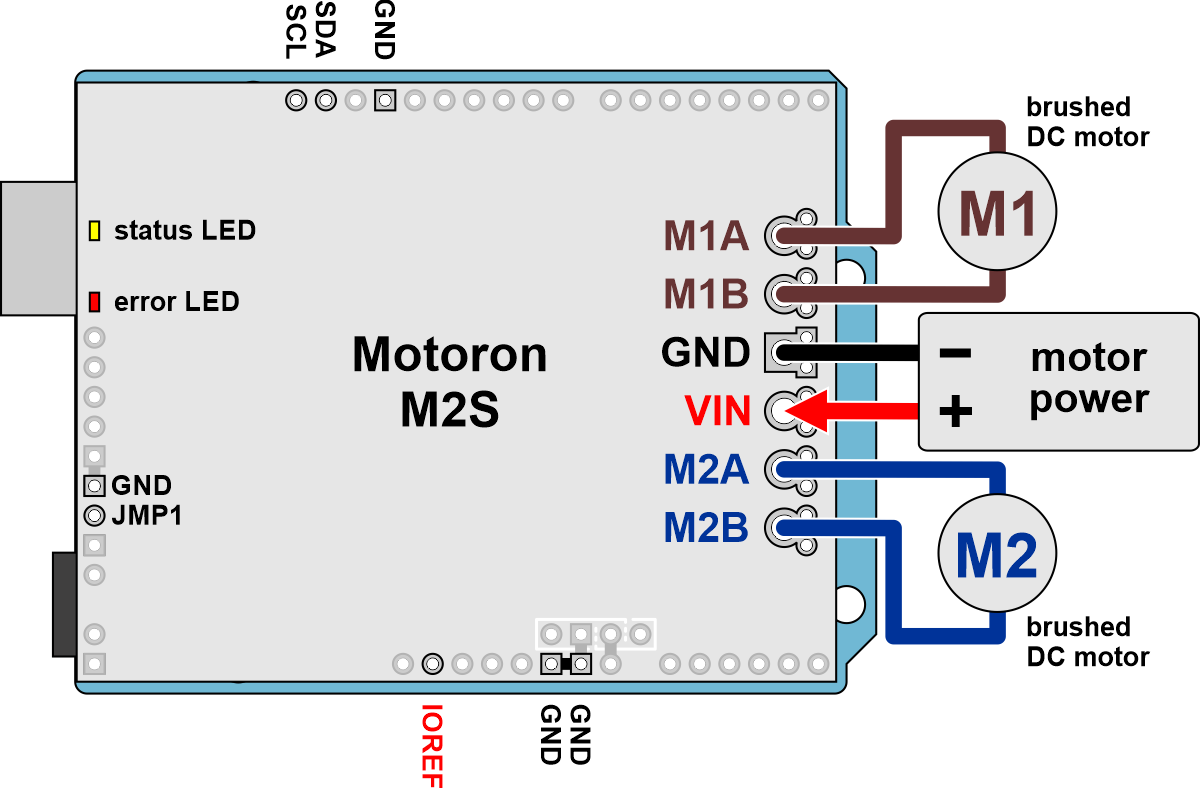
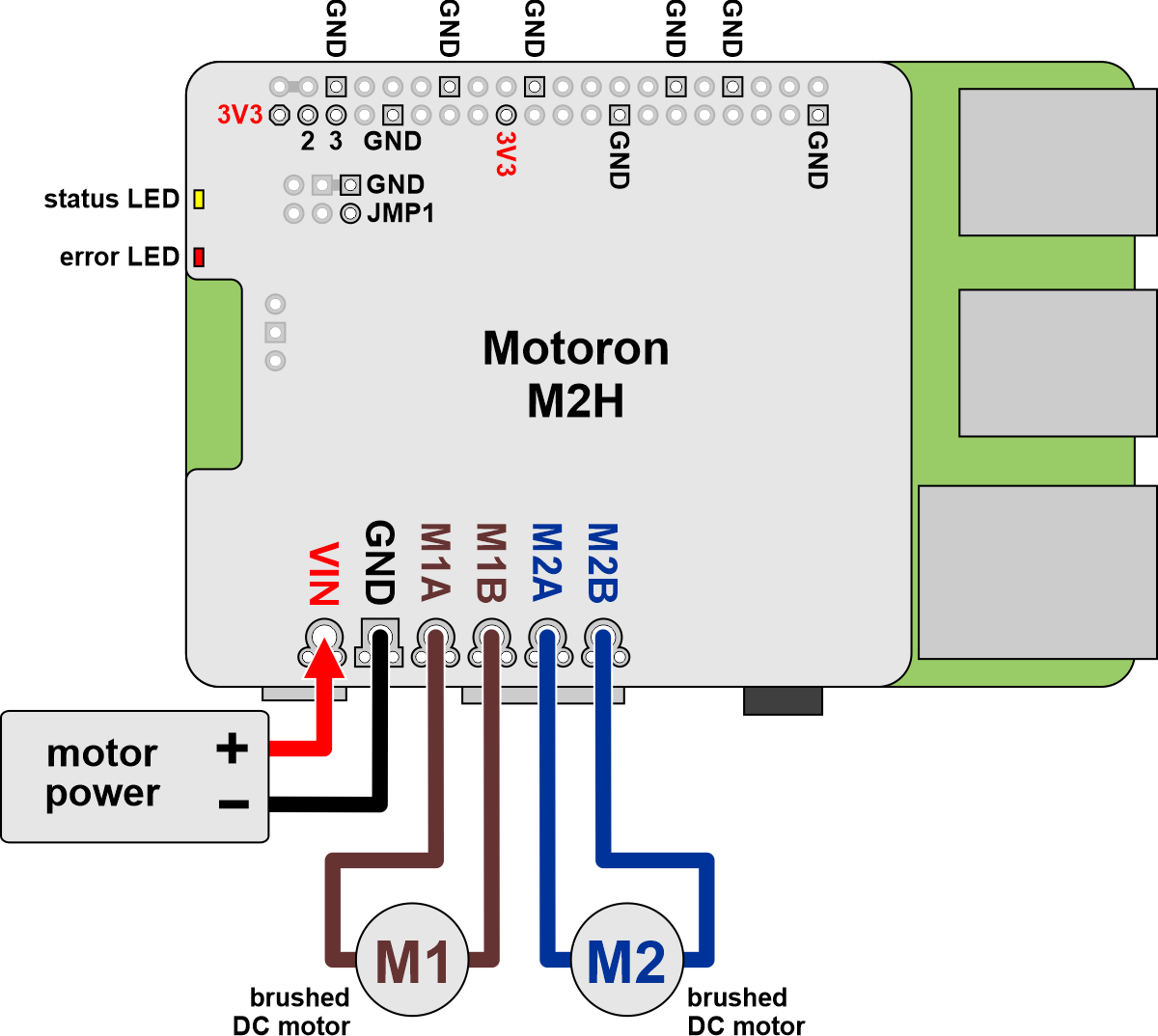
We’ve expanded our Motoron series of motor controllers with some dual high-power motor controllers: the Motoron M2S family for Arduino and Motoron M2H family for Raspberry Pi! These new Motorons have the same I²C interface as the M3S256 and M3H256, and though they only have two channels instead of the three on their smaller counterparts, they can drive much more powerful motors with up to 20 A of current at 30 V or 16 A at 40 V. There are four combinations of voltage and current ranges, available in versions designed to work as Arduino shields and as Raspberry Pi expansions.
|
|
These eight additions bring the Motoron family up to a total of ten members overall:
| Motoron Motor Controllers | |||||
|---|---|---|---|---|---|
M3S256 M3H256 |
M2S24v14 M2H24v14 |
M2S24v16 M2H24v16 |
M2S18v18 M2H18v18 |
M2S18v20 M2H18v20 |
|
| Motor channels: | triple (3) | dual (2) | |||
| Max input voltage: |
48 V | 40 V1 | 30 V1 | ||
| Max nominal battery voltage: |
36 V | 28 V | 18 V | ||
| Max continuous current per channel: |
2 A | 14 A | 16 A | 18 A | 20 A |
| Available versions for Arduino: |
M3S256 | M2S24v14 | M2S24v16 | M2S18v18 | M2S18v20 |
| Available versions for Raspberry Pi: |
M3H256 | M2H24v14 | M2H24v16 | M2H18v18 | M2H18v20 |
| 1 Absolute maximum. | |||||
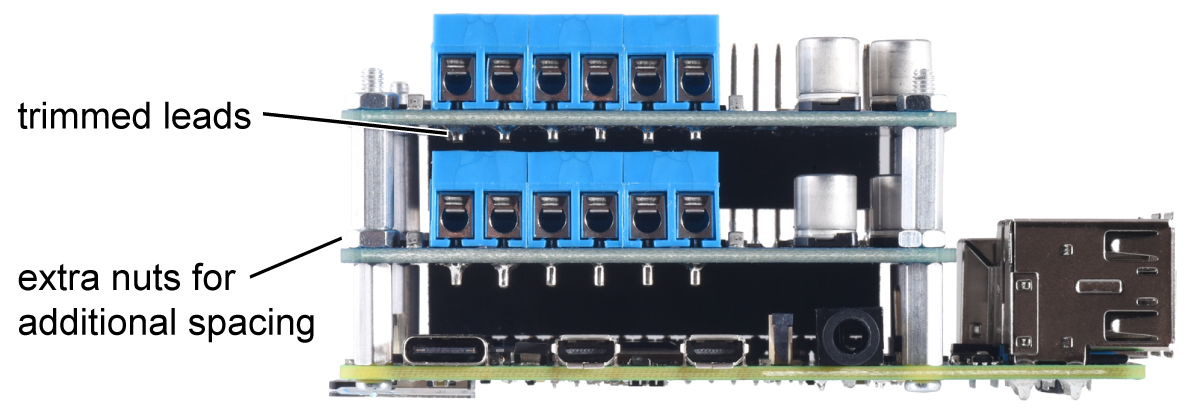
As with the smaller Motorons, the high-power versions can also be stacked and their addresses configured to allow many motors to be controlled with only one I²C bus. For a stack of M2S boards on an Arduino, we recommend soldering thick wires to the kit or board-only version because 5mm terminal blocks are tall enough that they would cause short circuits within the stack. However, the M2H boards can be set up to stack safely by trimming the terminal block leads and adding extra nuts to the standoffs for additional spacing.
|
|
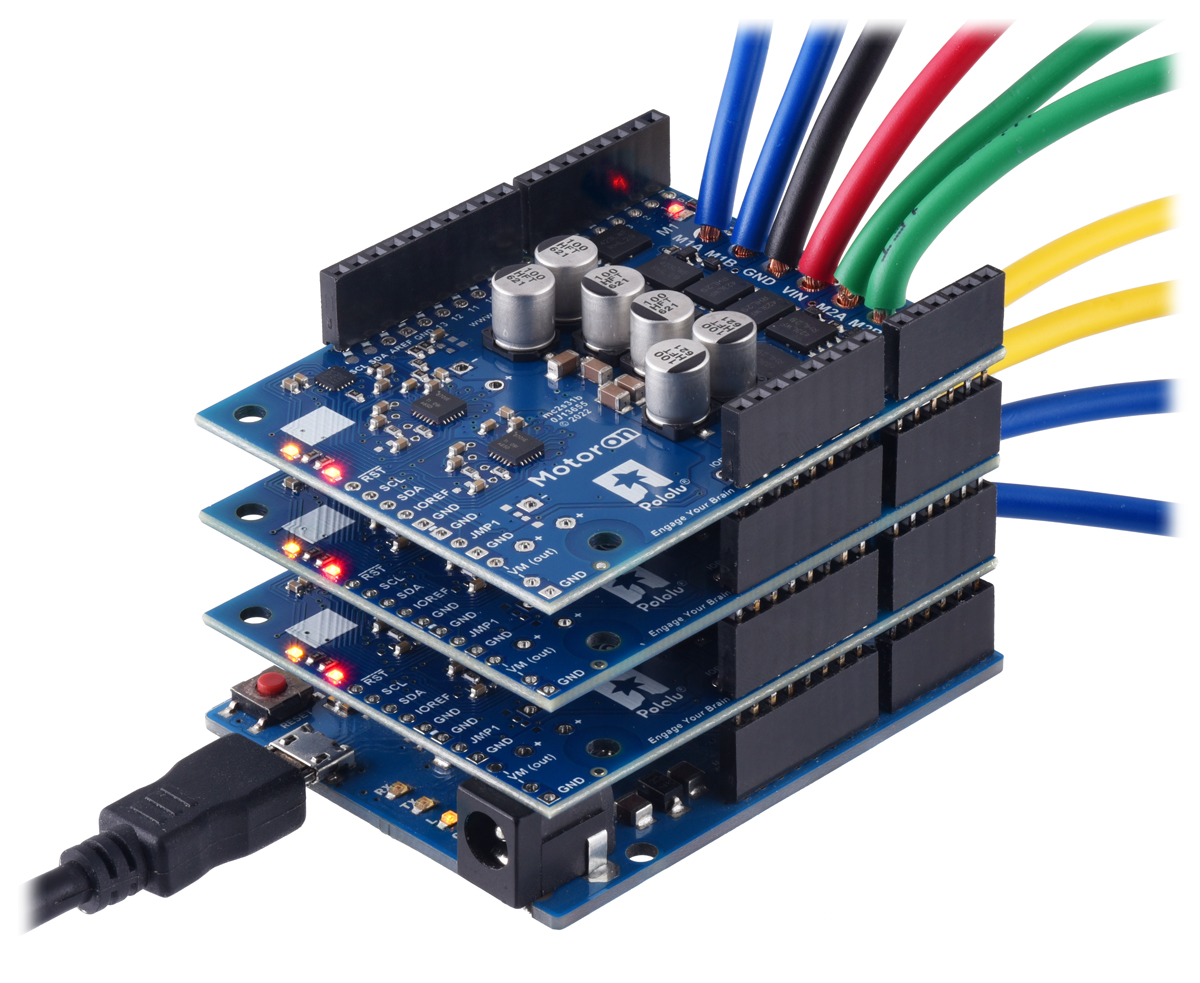
It’s also possible to stack different kinds of Motoron controllers so you can control different kinds of motors:
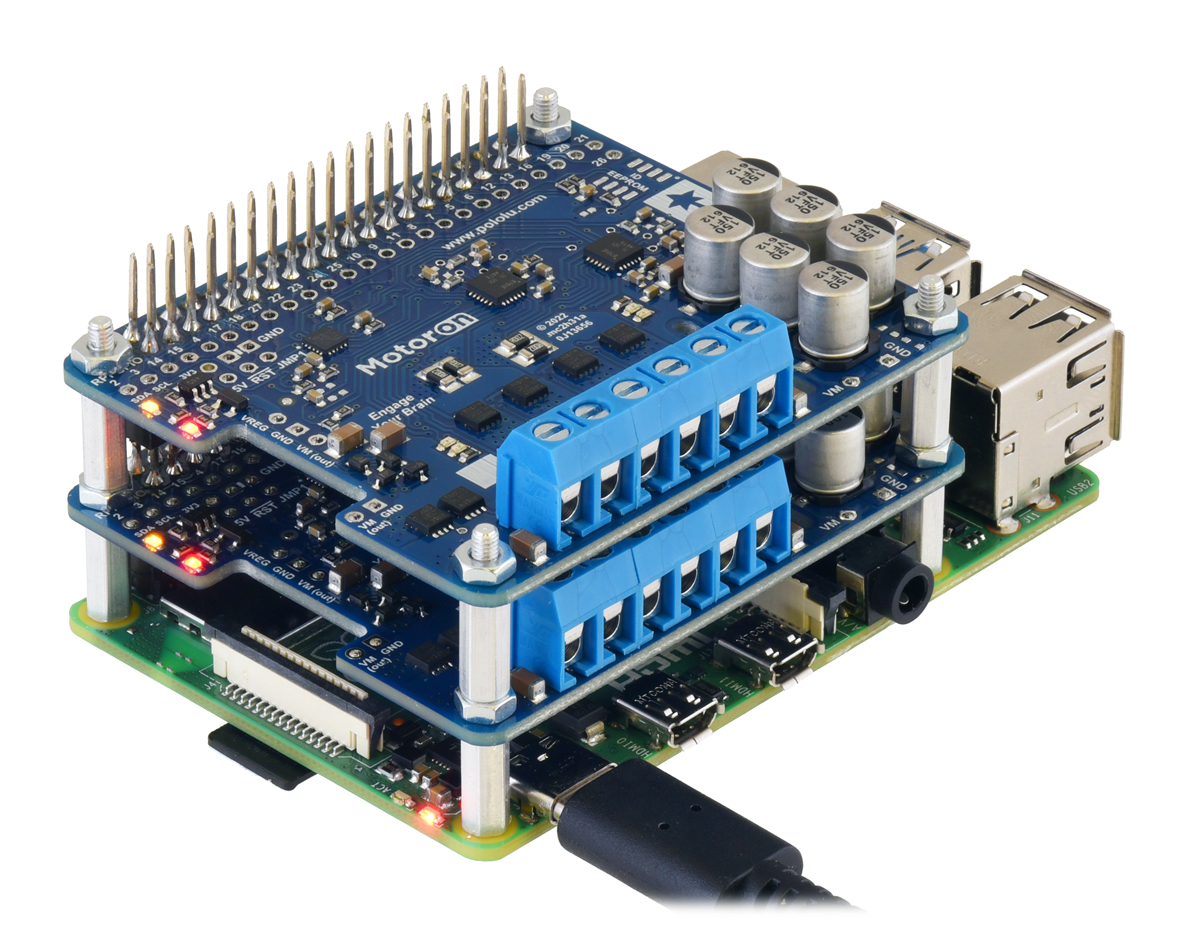
 |
A Motoron M2H and a Motoron M3H256 being controlled by a Raspberry Pi, allowing for independent control of five motors. |
|---|
Unfortunately, the current state of the electronics supply chain is affecting how we’re making and selling these Motorons. In the past, when we released boards in multiple versions that have different MOSFET footprints, it was primarily to get us different power levels. Typically, we would make a less expensive one with smaller, lower-power MOSFETs and a more expensive one with bigger, higher-power MOSFETs. While we’re still doing this kind of thing with the M2S and M2H Motorons (the 24v14 and 18v18 use smaller MOSFETs and the 24v16 and 18v20 use bigger ones), in this case, it’s largely about maximizing parts options.
When we don’t know how many months (or years!) it will take for us to get more of a MOSFET, it’s hard to offer a product line where each model is totally dependent on one specific part. So we’ve chosen to make the different Motoron versions less distinct; the specified performance and prices are not as different between the small- and big-MOSFET versions since we want them to be viewed more interchangeably. Their performance specifications are also a little on the conservative side to give us more room to use different MOSFETs.
Even with those considerations, we still haven’t been able to get the parts to make as many of these new high-power Motorons as we want to. That’s why they are listed with a “Rationed” status in our store, with lower stock and higher pricing than we’d like. But we hope that as parts availability improves, we will eventually be able to ease up on those restrictions.
In fact, that just happened with the smaller M3S256 and M3H256: we received some long-awaited critical components that will let us make a lot more of those, so you should see more in stock soon, and we’ve already removed their Rationed status and lowered their prices!
Related products










New product: Motoron M3H256 Triple Motor Controller for Raspberry Pi
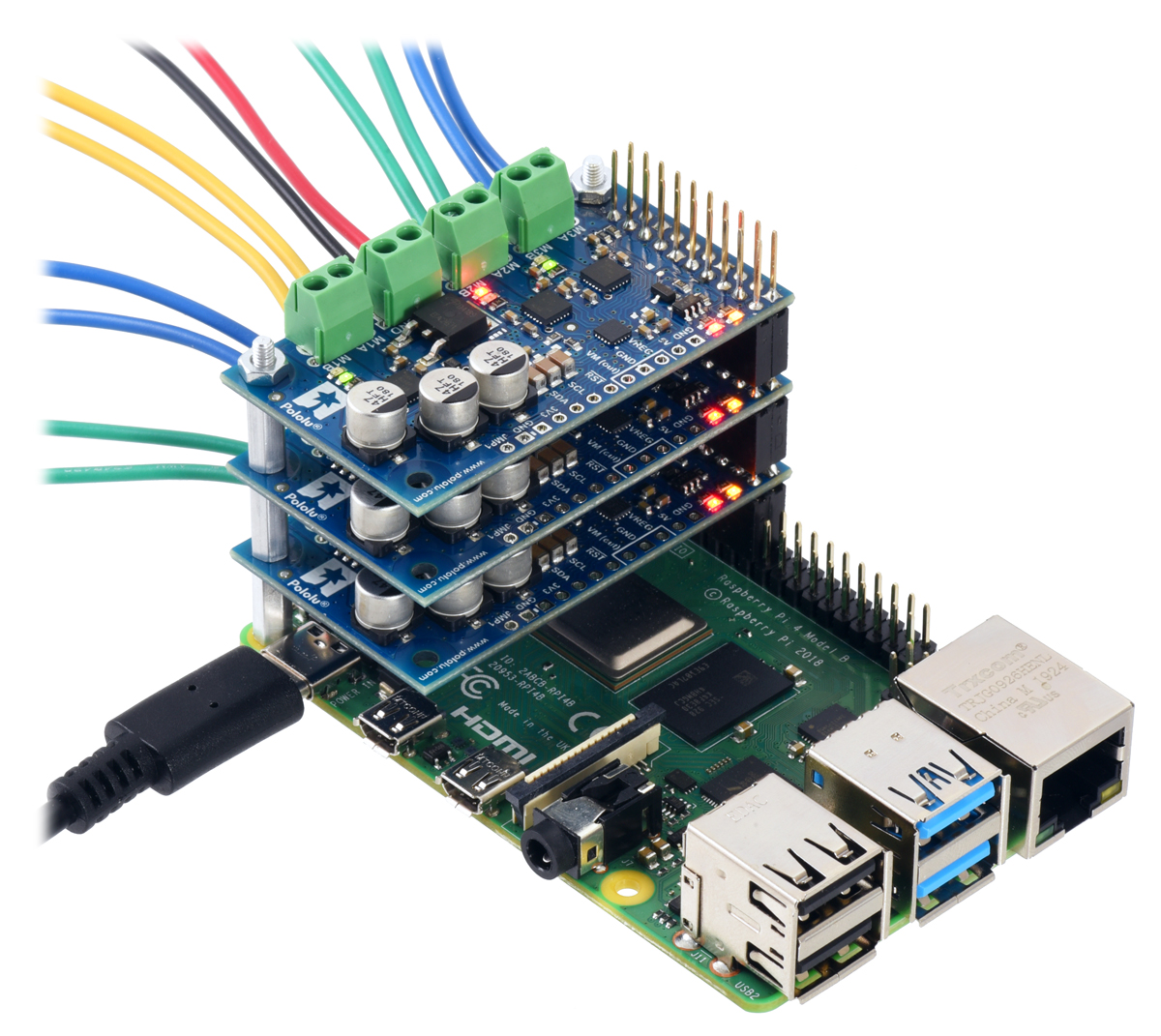 |
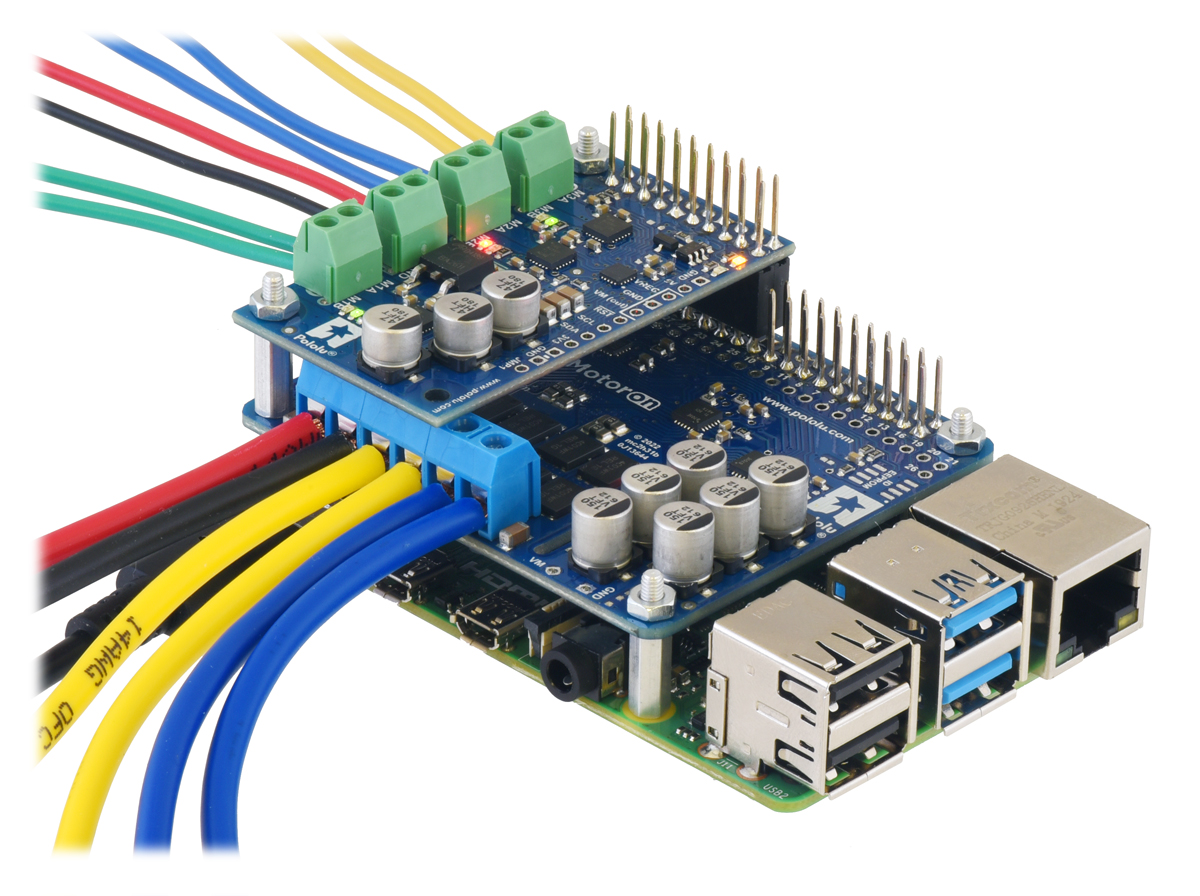
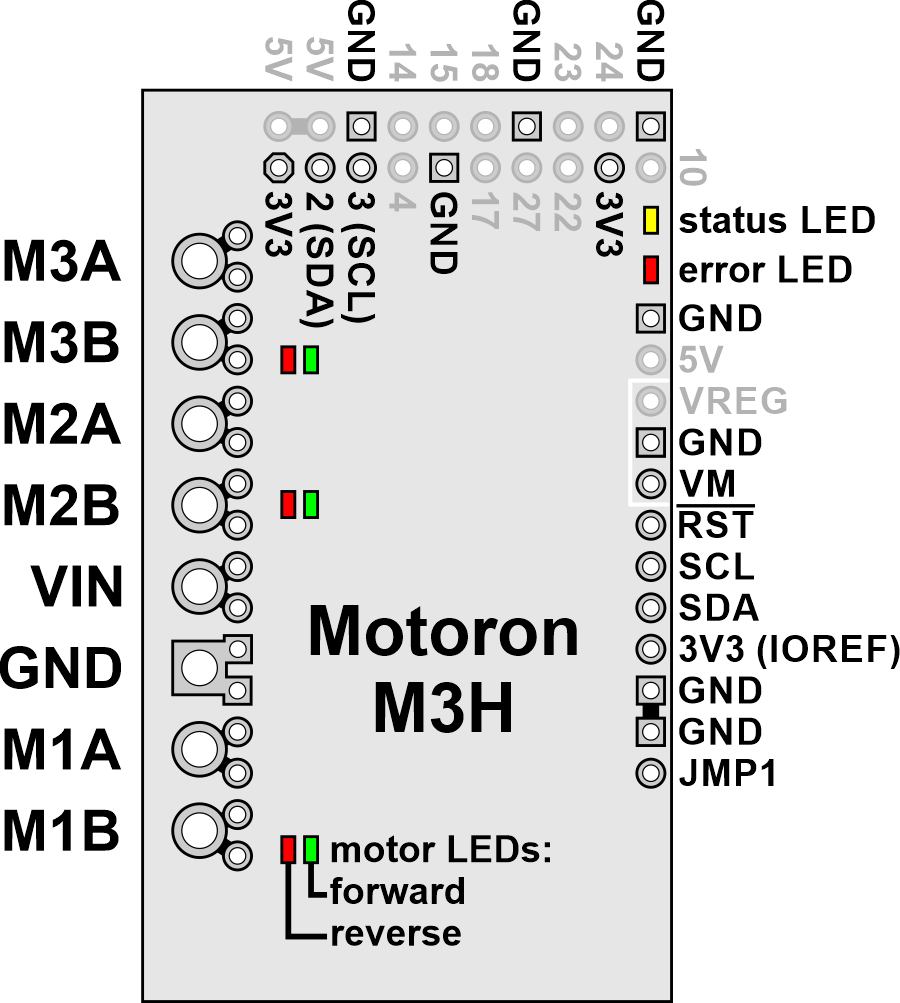
Our Motoron M3H256 Triple Motor Controller for Raspberry Pi is now available! The M3H256 is a stackable I²C motor controller that can drive up to three brushed DC motors bidirectionally at voltages between 4.5 V and 48 V and continuous currents up to 2 A per channel. Unlike its M3S256 sibling, which is designed as a shield for an Arduino, the Motoron M3H256 is intended to stack on top of a Raspberry Pi (Model B+ or newer), similar to a HAT (Hardware Attached on Top). With an I²C address that can be configured uniquely for each board, a stack of Motorons let you control many motors at once without taking up lots of GPIO pins and PWM outputs from the Pi.
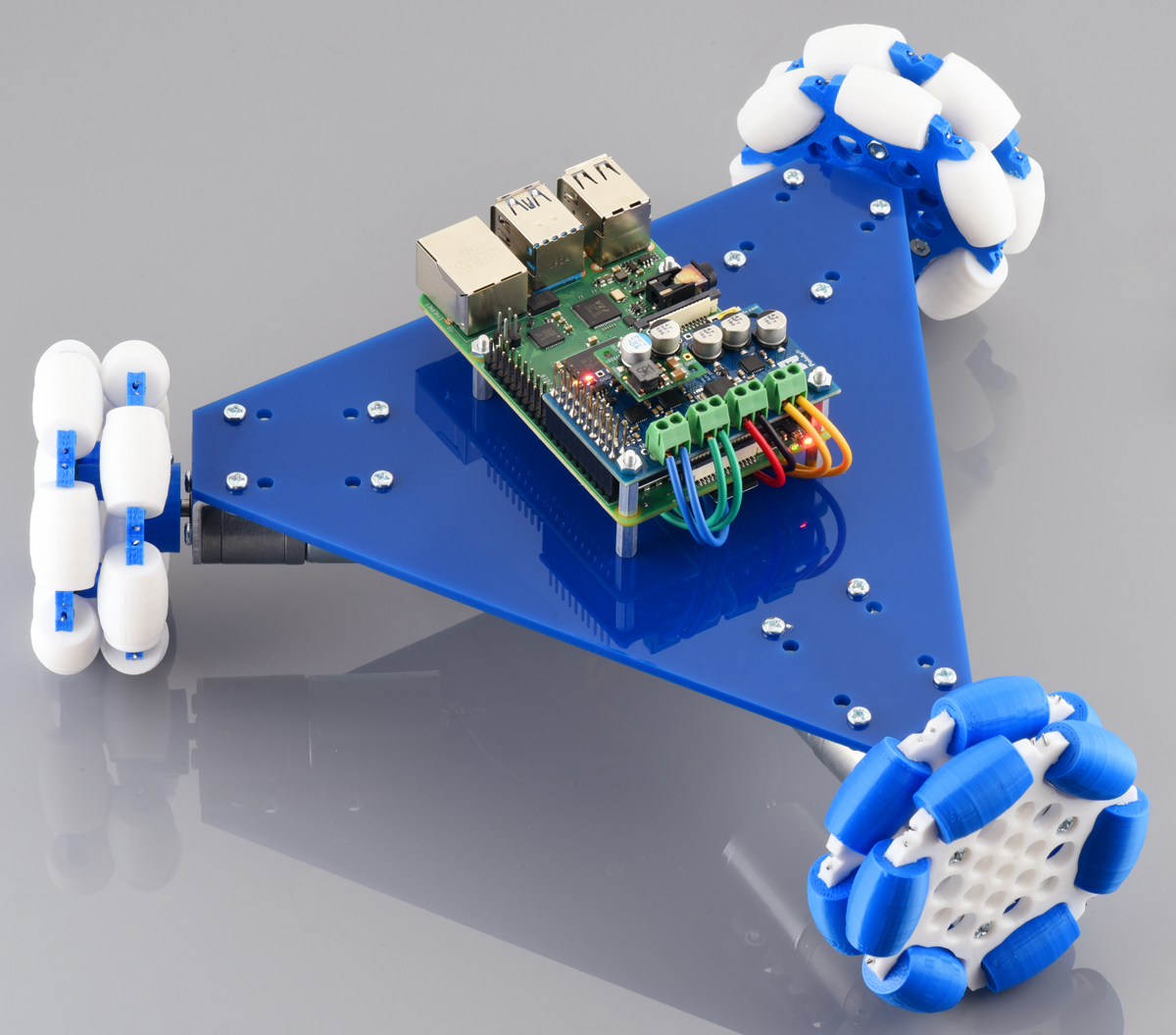 |
A robot with three omni wheels and motors controlled by a Raspberry Pi with a Motoron M3H256 Triple Motor Controller. A D24V22F5 regulator powers the Raspberry Pi. |
|---|
If you decide not to plug it into a Raspberry Pi, the Motoron M3H256 can also be used in a breadboard or another custom setup with your own wiring:
|
|

The Motoron M3H256 is available in three different configurations similar to its Arduino shield counterpart: you can get one fully assembled with stackable headers and terminal blocks already soldered, a kit that lets you pick which of the included connectors to solder in yourself, or the board alone if you already have or don’t need connectors and standoffs.
And to help you get started using the Motoron with a Raspberry Pi, we have a Python library you can use to configure the M3H256 and send it commands:
import motoron mc1 = motoron.MotoronI2C(address=17) mc2 = motoron.MotoronI2C(address=18) # Clear reset flags to allow Motorons to run mc1.clear_reset_flag() mc2.clear_reset_flag() # Set up acceleration limits for Motoron #1 mc1.set_max_acceleration(1, 200) mc1.set_max_acceleration(2, 200) # Set up acceleration and deceleration limits for Motoron #2 mc2.set_max_acceleration(1, 75) mc2.set_max_deceleration(1, 250) mc2.set_max_acceleration(2, 80) mc2.set_max_deceleration(2, 300) mc2.set_max_acceleration(3, 75) mc2.set_max_deceleration(3, 250) # Drive the motors mc1.set_speed(1, -100) mc1.set_speed(2, 100) mc2.set_speed(1, 300) mc2.set_speed(2, 200) mc2.set_speed(3, 50)
We’re sure there are plenty of applications where the convenience and scalability of Motorons will be useful. What kind of projects can you think of that would make good use of one (or several)?
For more information about the Motoron M3H256, see the product pages and the comprehensive user’s guide.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









