Pololu Blog » User Profile: Ben » Posts by Ben »
Posts by Ben (Page 5)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
(A little more than) twelve days of Christmas sale

If you missed our Black Friday sale or realize you didn’t quite get everything you wanted, don’t fret: we have all active Pololu-brand and PCX products on sale for 12% off, and we are offering 15% off twelve broad categories of our products. The sale runs through Friday, December 21, but be careful to order early for delivery before Christmas. Save on your Christmas shopping, or stock up now on robot parts for the new year. Check out the sale page for all the discounts and coupon codes. Merry Christmas!
Last call for Cyber Monday savings!

Things are slowing down in our warehouse as our biggest sale of the year winds down, and to all those who have ordered, thank you! There’s still time for you to get in on today’s deals if you haven’t already, but don’t wait too much longer: the deals end at midnight Pacific time.
Cyber Monday at Adafruit

Our friends at Adafruit are also having a Cyber Monday sale, with 20% off on their CircuitPython product line and 15% off sitewide. See their blog post for more details!
Our Black Friday/Cyber Monday sale is going strong, and happy Thanksgiving from Romi Turkey

Our biggest sale of the year is underway, and manufacturing and shipping are working hard to make your robot parts and ship them out. You’ve done a fantastic job challenging them so far, but they’ve still managed to keep up with our same-day shipping guarantee, even though we have suspended that during the sale. Let’s keep up the pressure and challenge them even more as the sale goes on!
There will be no doorbusters this weekend, just great deals on lots of products all weekend long. Doorbusters will return Monday morning, the last day of the sale.
Now, for something else fun: in the spirit of Thanksgiving, we dressed a Romi robot up as a Turkey. Enjoy!
Our huge Black Friday/Cyber Monday sale is almost here!

Greetings and Happy Thanksgiving from Pololu! Our biggest sale of the year is almost here, and like last year, we are offering different deals and doorbusters every day, starting tomorrow and running through Cyber Monday. Most sale products will be available with free US shipping, which should make it easy for you to place multiple orders throughout the sale to get in on the different deals. All of the sale details along with Wednesday’s specials are up on the sale page now, and don’t forget that the Wednesday doorbusters start at 6 AM Pacific Time!
Be sure to check the sale page daily for new deals, and you can also sign up for our mailing list to receive sale updates and exclusive offers.
New RoboClaw and MCP motor controllers from Basicmicro
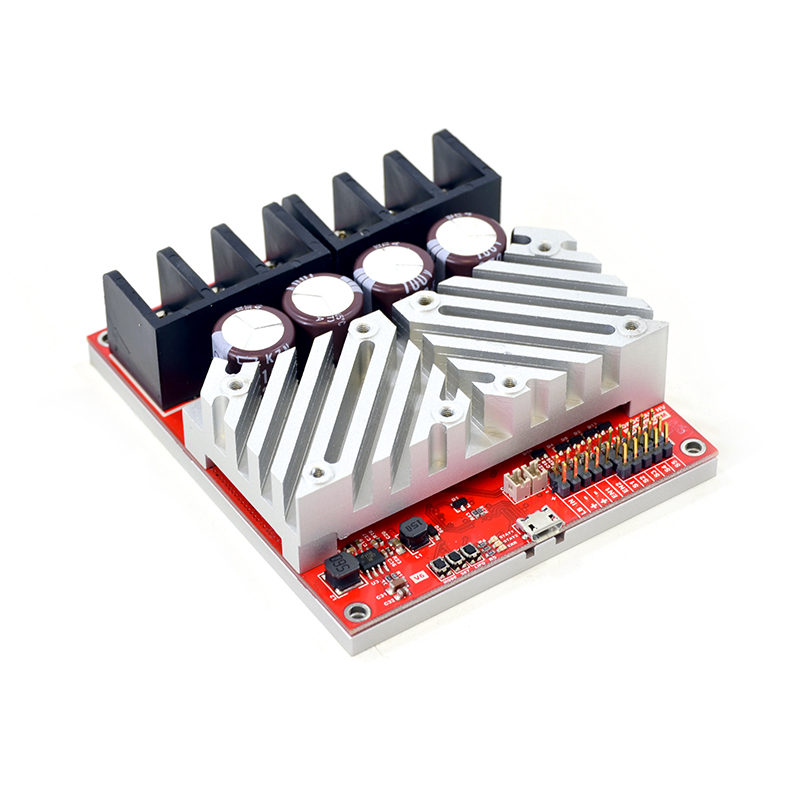 |
RoboClaw 2×60AHV, 60VDC Motor Controller. |
|---|
We are excited to offer eight new powerful motor controllers from Basicmicro (formerly Ion Motion Control):
- RoboClaw 2x60AHV, 60VDC
- RoboClaw 2x160A, 60VDC
- MCP233 Dual 30A, 34VDC
- MCP236 Dual 30A, 60VDC
- MCP263 Dual 60A, 34VDC
- MCP266 Dual 60A, 60VDC
- MCP2163 Dual 160A, 34VDC
- MCP2166 Dual 160A, 60VDC
The two new RoboClaws bring our total selection of those to nine versions. Unlike the other RoboClaws, which have a maximum operating voltage of 34 V, these new RoboClaws and some of the new MCP controllers can work up to 60 V and deliver a continuous 60 A or 120 A per channel, making them the most powerful motor controllers we carry by far.
|
|
|



The six MCP products are from Basicmicro’s rugged new line of MCP Advanced Motor Controllers, which are optionally programmable via a built-in scripting language and support a variety of interfaces, including USB serial, TTL serial, RS-232 serial, CAN bus, RC hobby servo pulses, and analog voltages. Here is a summary of the key features of the MCP:
- Simple bidirectional control of two brushed DC motors
- 10–34 V or 10–60 V operating supply range, depending on controller model
- 30 A to 160 A maximum continuous current output, depending on controller model
- Channel bridging allows control of a single motor with double the current capability
- Automatic current limiting reduces duty cycle when temperature exceeds 85° C
- Six communication or control options:
- USB serial interface (virtual COM port)
- 3.3 V logic-level (TTL) serial interface for direct connection to microcontrollers or other embedded controllers
- RS-232 serial interface
- CAN bus interface supporting CANopen protocol as master or slave device
- Hobby radio control (RC) pulse width interface for direct connection to an RC receiver or RC servo controller
- Analog voltage (0 V to 5 V) interface for direct connection to potentiometers and analog joysticks
- Automatic control switching with user-defined priority settings
- I²C interface accessible by user script
- Up to 20 user-defined input pins for control, feedback, or scripting, depending on controller model
- All inputs are 15 V tolerant for interfacing to industrial devices such as PLCs
- Up to 8 user-defined open-drain output pins (40 V max) for driving auxiliary loads, depending on controller model
- Multiple feedback options for PID closed-loop control:
- Speed or position control with quadrature encoders, up to 21 million encoder pulses per second
- Position control with analog encoders or potentiometers
- (Open-loop control with no feedback also available)
- Programmable with built-in user scripting language
- Screw terminals for quick connect/disconnect
- Configurable via USB connection and PC software
- Regenerative braking
- Tolerates high-speed direction changes
- 5 V BEC can power external logic
- Battery monitoring and under-voltage cutoff protects batteries from over-discharging
- Fully enclosed for protection
- Conduction plate for cooling on bottom of enclosure
Related products








Polo-BOO! Halloween Sale

Looking to make an awesome Halloween costume or impressive yard display? Well, we want to help, so we’re having a sale through Wednesday, October 24 on hundreds of items you can use to make things that will impress or terrify your friends and neighbors! Visit the sale page for more information, and if you are in need of some inspiration, check out our Halloween-tagged blog posts for some sample projects.
By the way, we’d love to see more about the amazing things you all are building with our products, so please don’t hesitate to share them with us!
New-ish product roundup: 24 more QTR arrays, MP6500 carriers with soldered headers, and a pressure sensor
We’ve been hard at work over the past week putting up lots of new (but perhaps familiar-seeming) products. Here’s a quick recap:
24 new QTR reflectance sensor arrays
Our rapidly growing selection of new QTR sensors now includes high-density (HD) versions with 3, 6, and 9 channels, and medium-density (MD) versions with 2, 3, and 5 channels.
|
|
|
|||
|
|
|





Each of these is available with two sensor options—traditional QTR and high-performance, low-current QTRX—and with analog or digital (RC) outputs, making 24 new products in all. Check out the QTR reflectance sensor category to see our full selection, which now stands at 68 varieties, and don’t forget to use our QTR introductory promotion to get 50% off any of these new sensors! (Limited to the first 100 customers who use coupon code QTRINTRO, limit 3 per item per customer.)

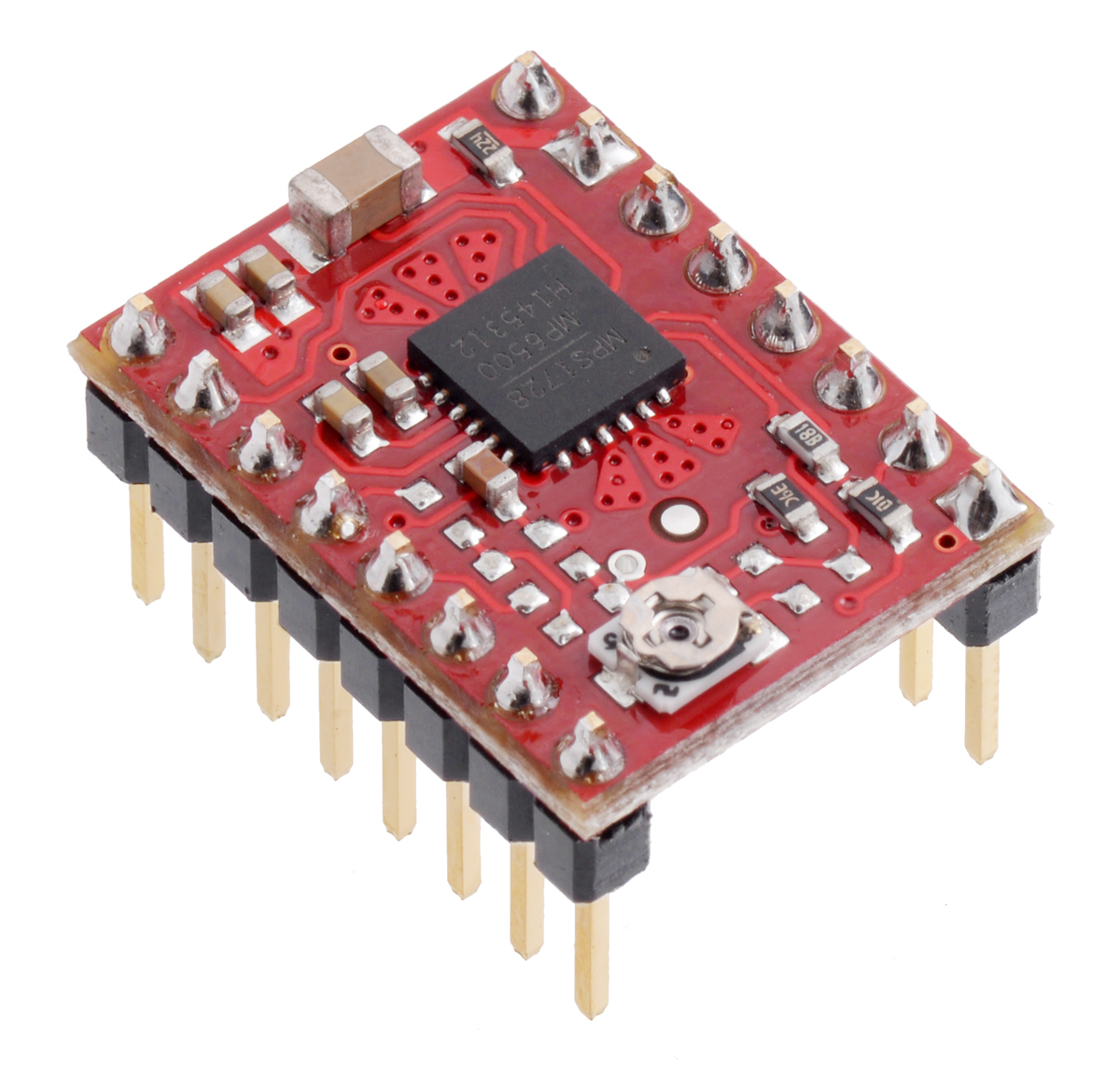
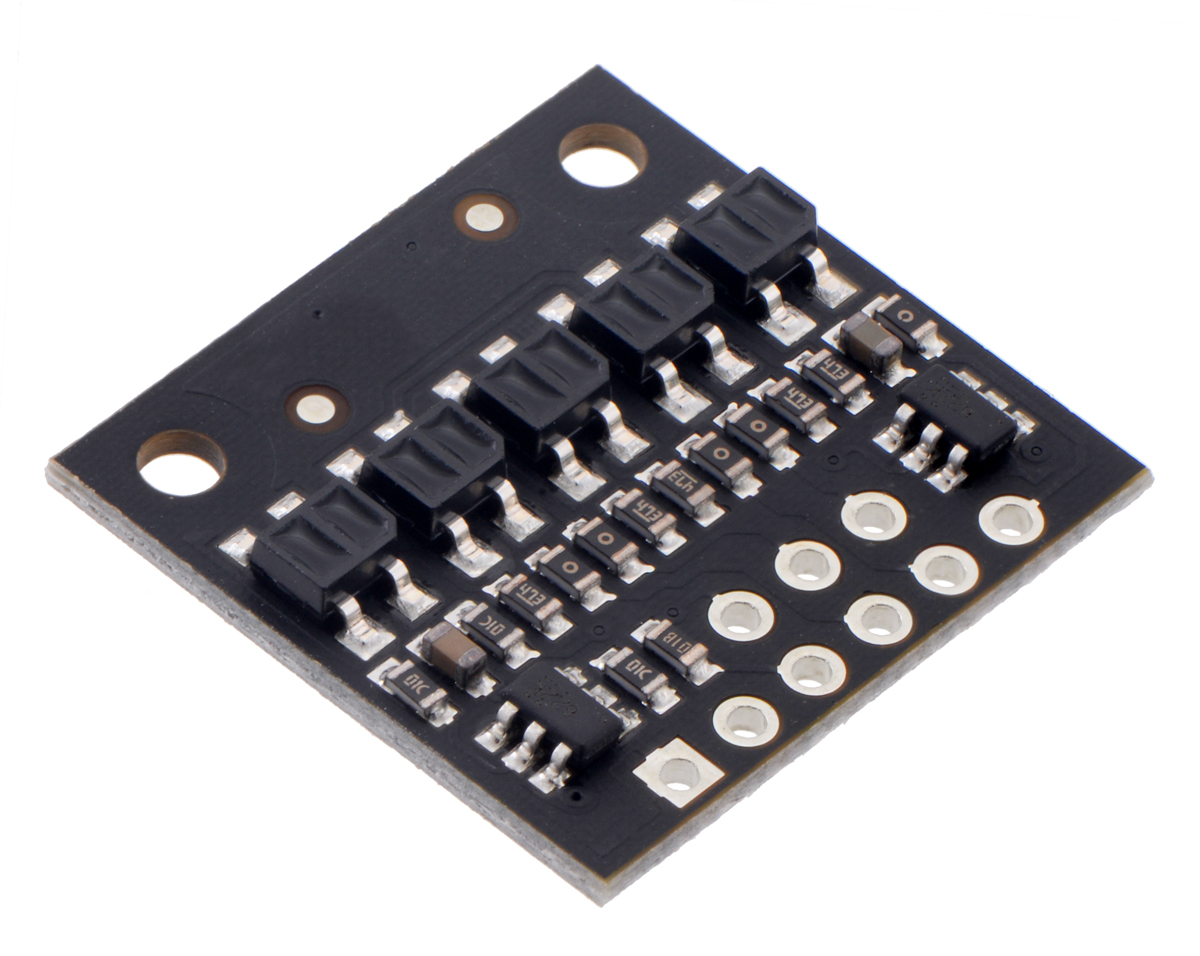
MP6500 stepper motor driver carriers with soldered header pins
 |
 |
We have received a number of requests to make the MP6500 stepper motor driver carriers we released earlier this year available with the header pins already soldered, so here they are! These carriers are available in two versions, one with the current limit set by a potentiometer, and one that allows for dynamic current limit control through a pair of digital inputs, and both are now available with soldered header pins:
- MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control (Header Pins Soldered)
- MP6500 Stepper Motor Driver Carrier, Digital Current Control (Header Pins Soldered)
For a more detailed introduction to these drivers, see our original MP6500 carrier product announcement.
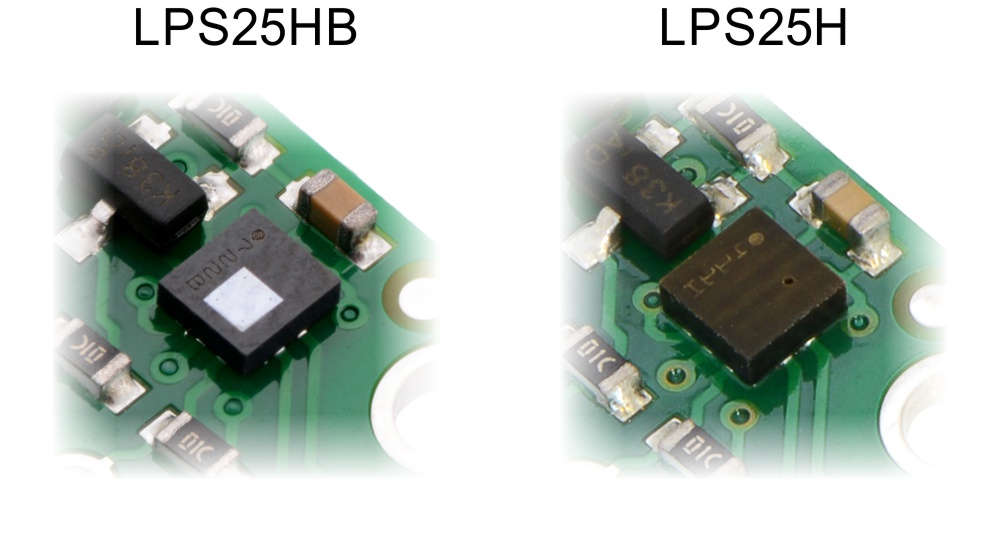
LPS25HB pressure/altitude sensor carrier
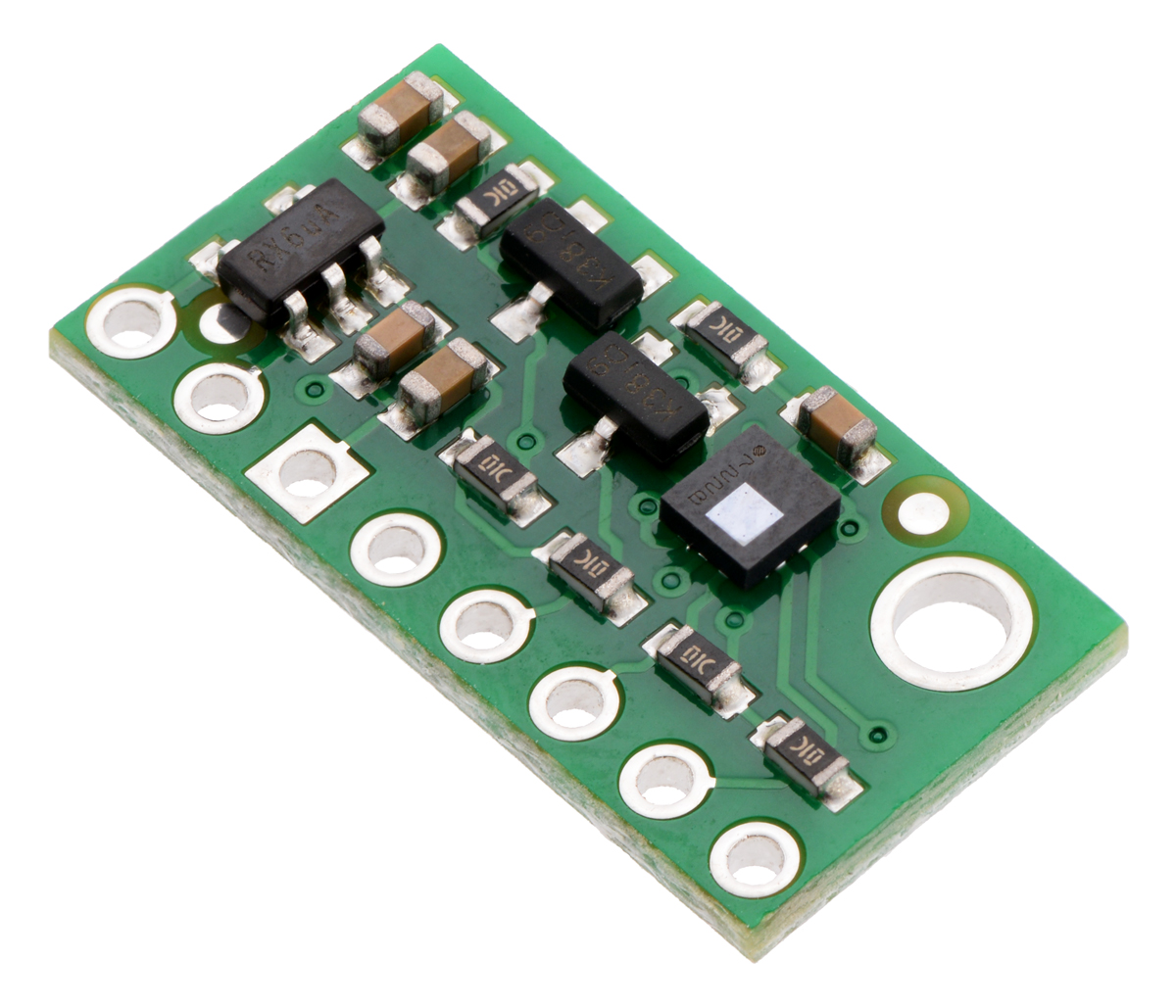
This is a minor update to our existing LPS25H pressure sensor carrier, which is now on clearance. The new version uses the same PCB as the original, hence the “©2014” on the silkscreen. and replaces the LPS25H with the newer LPS25HB, a drop-in replacement with the same register map and performance. Most people shouldn’t notice any difference using the new version compared to the old one, though ST says in their LPS25H upgrade guide (200k pdf) that the LPS25HB has better moisture resistance and reliability. That said, please keep in mind that we have not characterized the moisture resistance of the rest of the carrier, and moisture is generally something we recommend you keep away from all of our electronics.
Visually, the LPS25HB is easy to distinguish from the LPS25H as the former has a shiny silver square patch on the package while the latter has a more noticeable hole:
 |
We have already started making our AltIMU-10 v4 and AltIMU-10 v5 IMUs with the LPS25HB, and we did so without using new product numbers or updating the pictures or descriptions because this change should not affect those products in any meaningful way (we have a new product number for the updated basic carrier since the specific sensor on there is pretty much the whole point of the product).
On a related note, we still have a lot of the even older LPS331AP pressure sensors/digital barometers left, so we have put the LPS331AP carriers on even more clearancy clearance!
Related products








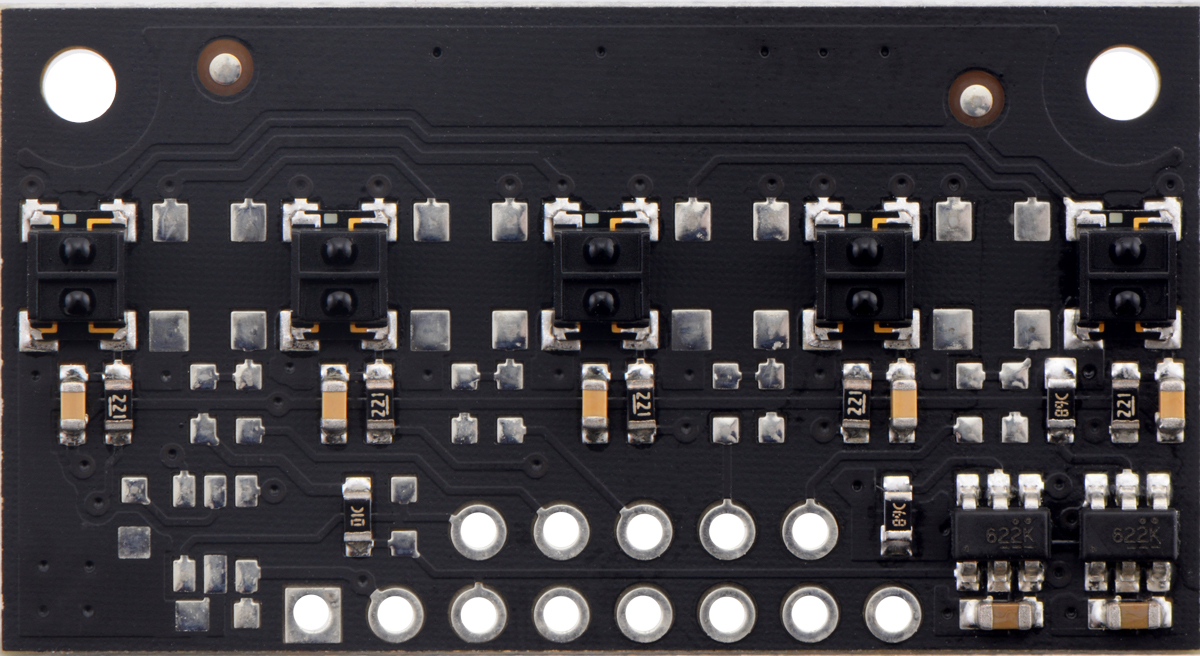
New products: 5-channel QTR HD reflectance sensor arrays
 |
QTRX-HD-05RC Reflectance Sensor Array, front and back views. |
|---|
We now have five-sensor versions of our new high-density QTR reflectance sensor arrays. Like the versions already released, these new modules are available in analog and RC configurations and with two different sensor types, so this post covers four new products:
 |
QTR-HD-05A Reflectance Sensor Array. |
|---|
- QTR-HD-05RC Reflectance Sensor Array
- QTR-HD-05A Reflectance Sensor Array
- QTRX-HD-05RC Reflectance Sensor Array
- QTRX-HD-05A Reflectance Sensor Array
(Medium-density versions with 3 sensors on an 8 mm pitch will be available soon.)
We expect these to be the smallest arrays that still offer independent control of the odd and even emitters, which gives you extra options for detecting light reflected at various angles. For more information on our new QTR sensor family, you can see some of our previous blog post about the versions we have already released:
- New products: 1- and 31-channel QTR HD reflectance sensor arrays
- New products: more new QTR HD sensor arrays by student engineering interns
- New products: QTR HD sensor arrays by student engineering interns
- New product: high-density QTR reflectance sensor arrays
Don’t forget to get in on our QTR introductory promotion! Be one of the first 100 customers to use coupon code QTRINTRO and get any of these new sensors at half price! (Limit 3 per item per customer.)
Related products




Labor Day weekend sale

We are having a Labor Day sale all weekend long with site-wide discounts of up to 25%! Check out the sale page for more information. Please note that we will be closed Monday, so orders placed after 2 PM Pacific Time today (Friday, August 31) will be shipped on Tuesday, September 4.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










