Pololu Blog » Posts tagged “new products” »
Posts tagged “new products” (Page 15)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
FEETECH Ultra-High-Torque, High-Voltage Digital Giant Servo FT5335M
 |
We added the FEETECH Ultra-High-Torque, High-Voltage Digital Giant Servo FT5335M to our expanding RC servo selection. This giant-scale digital servo can deliver twice the torque of our strongest standard-size servo, offering up to 550 oz-in at 7.4V or 480 oz-in at 6 V. This torque requires significant power: the FT5335M can draw bursts of current over 9 A at 7.4 V, and unlike typical hobby servos, has an operating voltage range of 6 V to 7.4 V.
|
|

This servo is a lower-cost alternative to the very similar 1235MG from Power HD. The two servos are approximately the same size, though the mounting hole spacing differs between the two, and they have almost identical performance specifications. The output shaft of the 1235MG is supported by two ball bearings while the output shaft of the FT5335M is supported by bushings. The picture below shows both the FT5335M and the 1235MG side-by-side:
 |
Expect more new FEETECH servos in the coming weeks!
Related products


Aluminum standoff for Raspberry Pi
 |
We are now carrying the Aluminum Standoff for Raspberry Pi: 11mm Length, 4mm M2.5 Thread, M-F. The 11 mm body length is just right for mounting expansion PCBs or HATs with standard-size female headers on a Raspberry Pi. The male M2.5 threads extend another 4 mm past the standoff body, and the female M2.5 threads extend at least 6.35 mm into the body. We carry M2.5 nuts and 6 mm M2.5 screws separately.
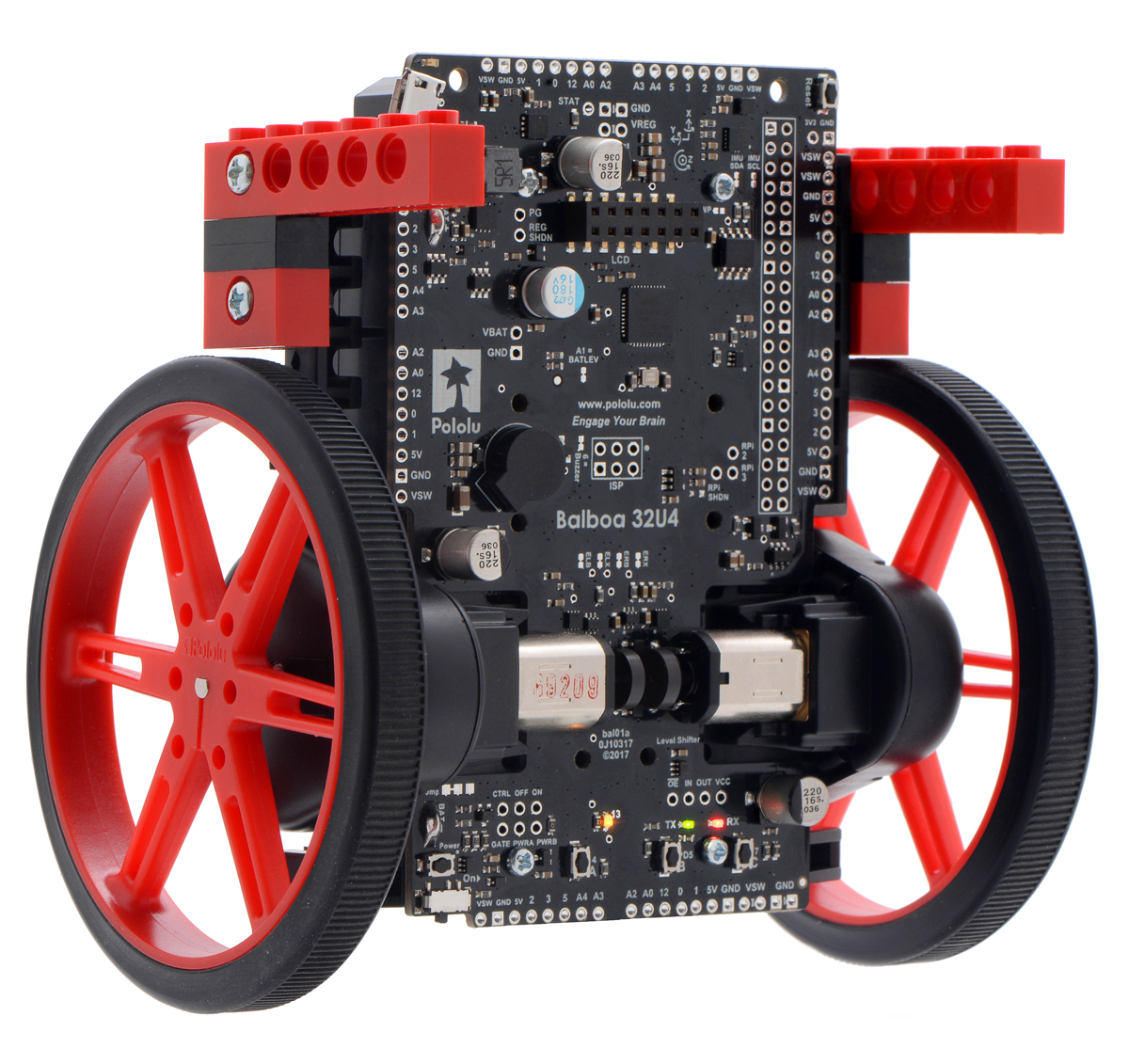
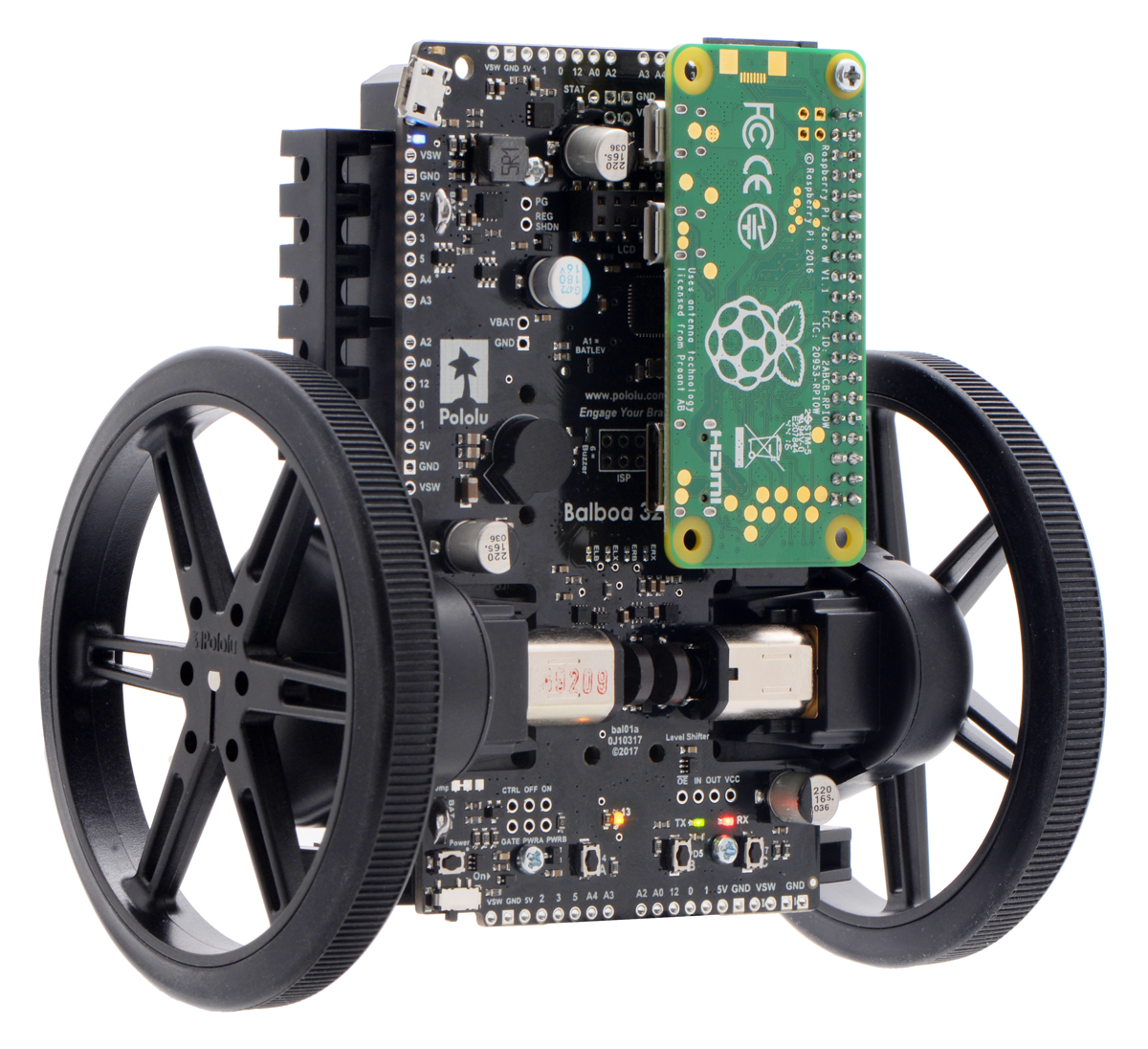
Two of these standoffs are needed to mount a Raspberry Pi on a Balboa 32U4 robot:
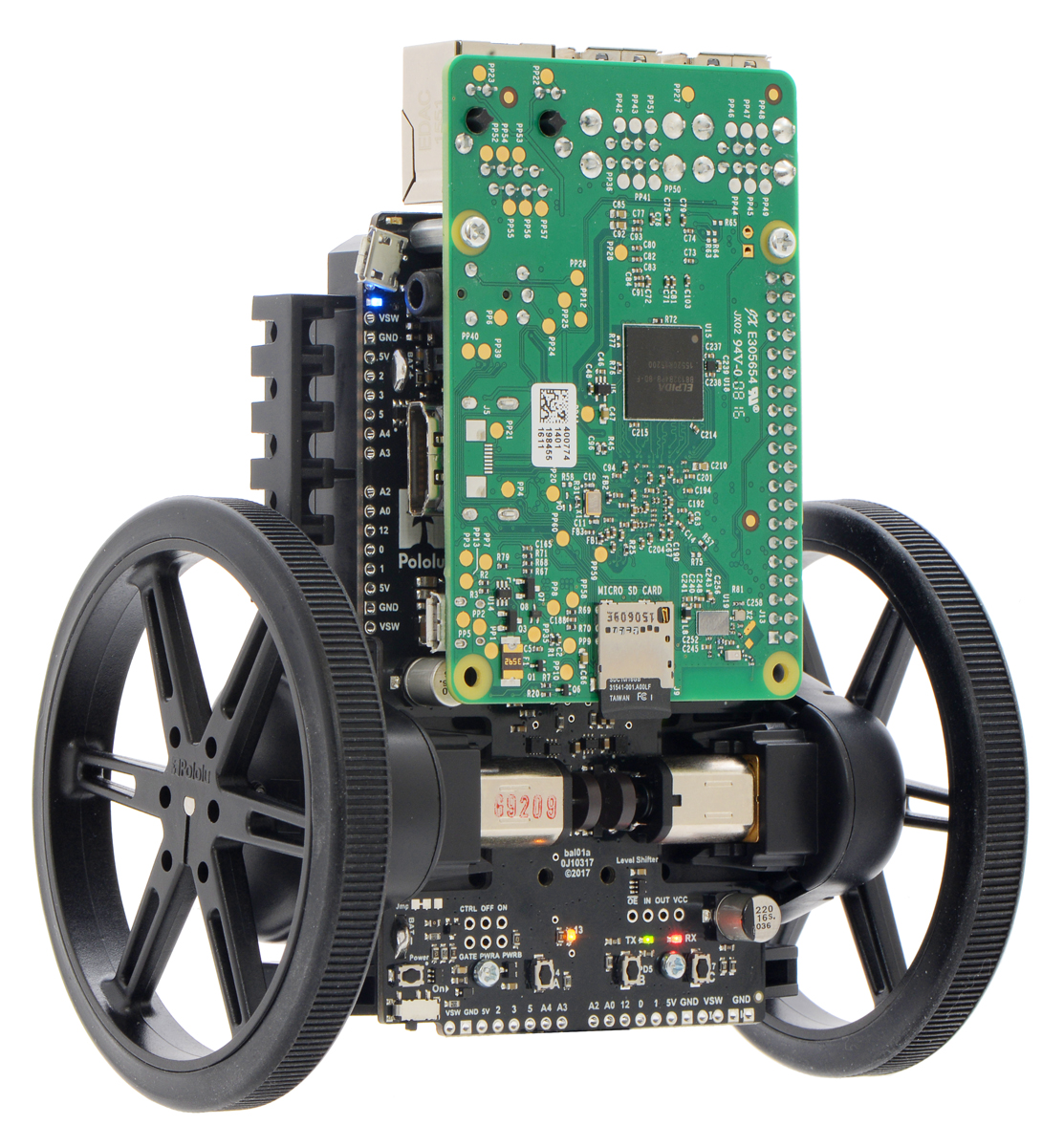 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 3 Model B. |
|---|
We also carry a 11 mm standoff with longer, 6mm threads. (We do not recommend these for the Balboa because the threads hit the robot chassis.)
Related products





New 5V step-up/step-down voltage regulator S9V11F5
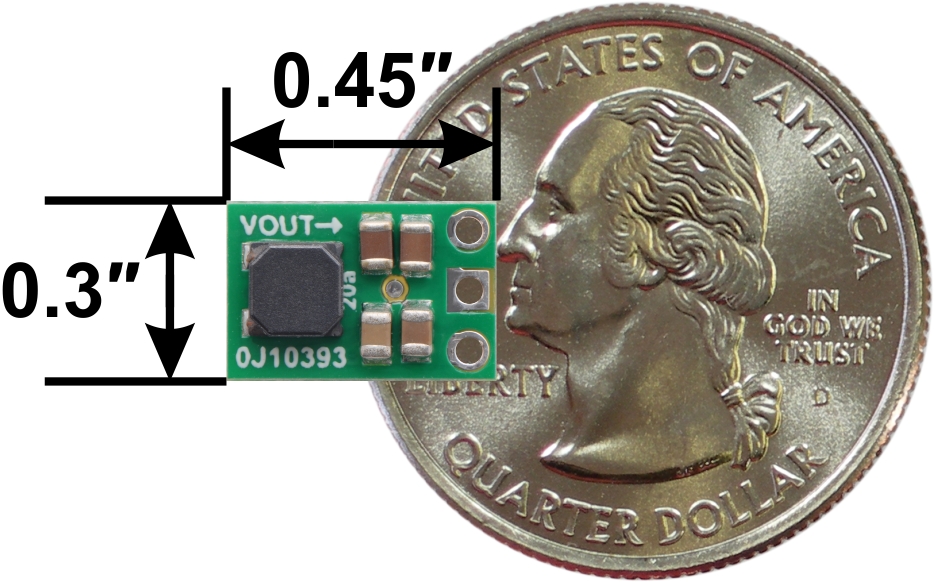 |
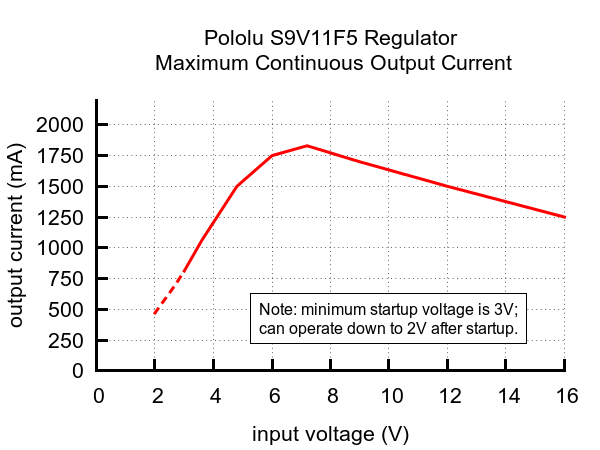
Our newest step-up/step-down voltage regulator, the S9V11F5, takes input voltages between 2 V and 16 V and increases or decreases that voltage as necessary to produce a fixed 5 V output with a typical efficiency of over 90%. (Note that it requires a minimum of 3 V to start up, but it can operate down to 2 V once it is running.) It can temporarily deliver peaks of around 2 A, and the maximum continuous output current depends on the input voltage as shown in the graph below:
 |
The ability to raise or lower the input voltage makes this regulator especially well suited for battery-powered applications where the nominal battery voltage is close 5 V, such as when using four NiMH cells, since the battery voltage transitions from above 5V to below as the battery discharges. The wide input voltage range is also great for applications where you want a lot of flexibility in power supply choice or for systems powered by alternative energy sources like solar or wind, where the output voltage can vary a lot.
With a wider input voltage range and its ability to deliver more current, the S9V11F5 is a higher-performance alternative to our popular S7V7F5 buck-boost regulator, all while being even smaller in size thanks to its double-sided assembly.
For more information on this regulator, visit the S9V11F5 product page, and for other regulator options, you can take a look at our full selection of step-up/step-down regulators, step-up voltage regulators, and step-down voltage regulators.
Related products


New #2 and #4 screw lengths
 |





Free magazines: December, January, February, and March Circuit Cellars
|
|
|
|

Get FREE copies of Circuit Cellar magazine’s December 2016, January 2017, February 2017, and March 2017 issues with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT1216, CIRCUIT0117, CIRCUIT0217, and CIRCUIT031716 to your shopping cart, or click those links. Each magazine will add 6 ounces to your order weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers.
New M3 screw lengths
 |
We added some new M3 screw lengths to our catalog: 6 mm, 10 mm, 12 mm, 14 mm, 16 mm, and 20 mm. (We already had 5 mm, 8 mm, 25 mm screws, and M3 nuts.) Along with the general usefulness of a large selection of hardware, this greater variety of available lengths will help make it easier to mount accessories to your new Balboa 32U4 balancing robot’s M3-compatible mounting points.
|
|

Related products









Balboa is here!
 |
I am excited to announce the release of the Balboa robot! The Balboa is a two-wheeled balancing robot platform that is small enough to tempt you to run it on a desktop, but it’s quick enough that you should probably stick to bigger, softer surfaces. Or at least put a safety net or foam pit around your desk. Here is a short video showing it kicking up into balancing position and driving around:
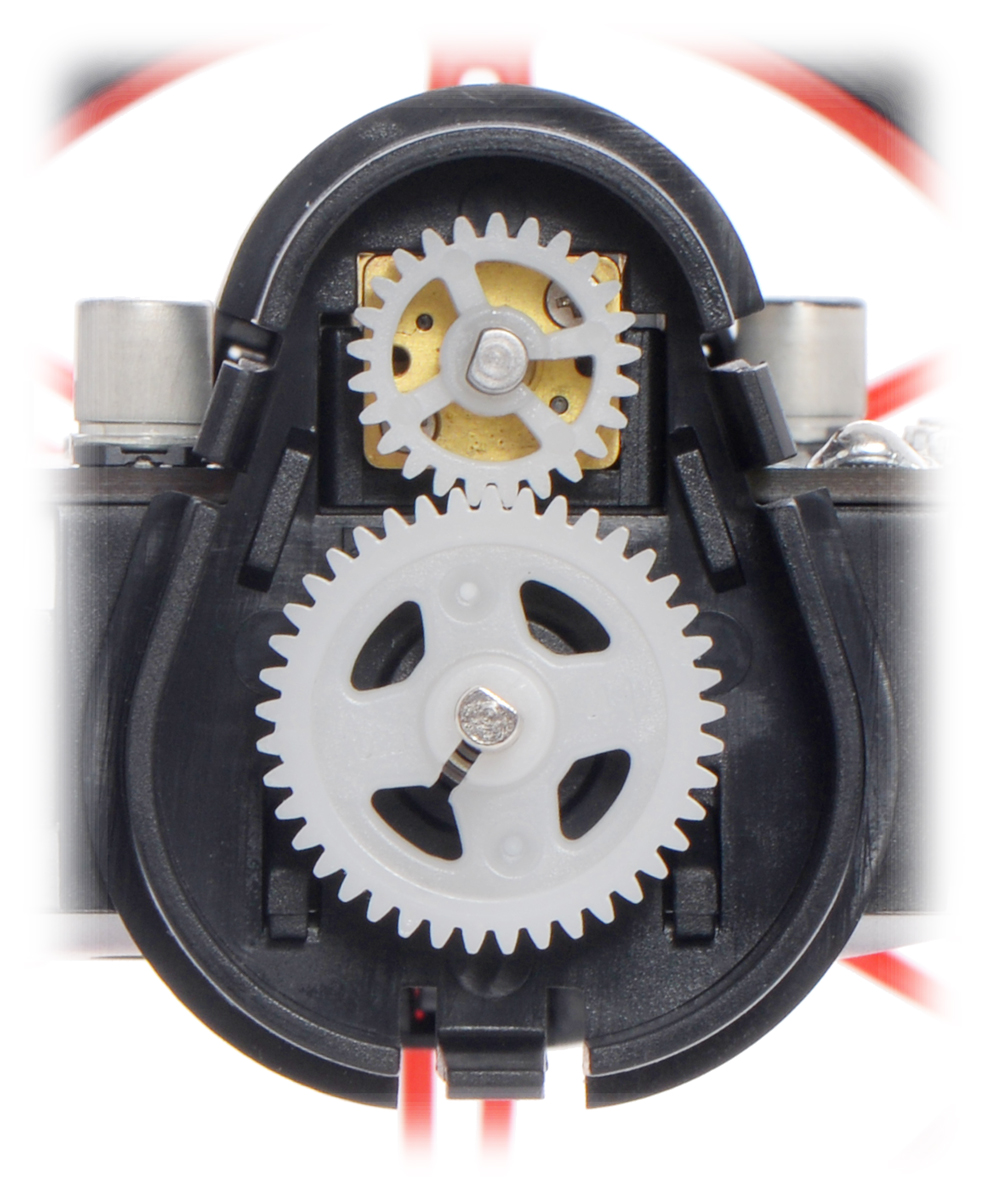 |
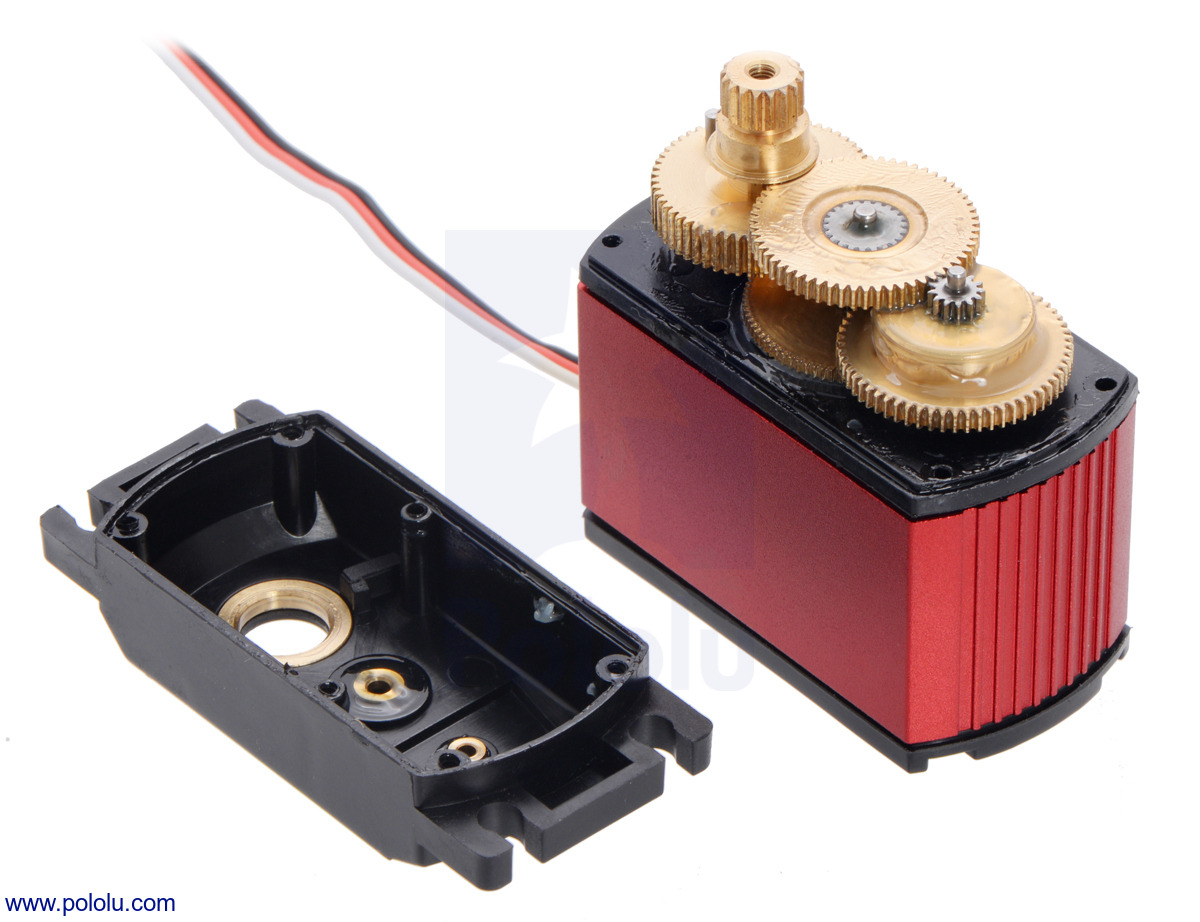
A look inside the external gearbox on the Balboa 32U4 Balancing Robot. |
|---|
One of our main goals in designing our robots is to make them complete and engaging on their own while making them open and expandable enough for all kinds of projects. We also don’t want them all to be the same. Most of the Balboa robots in our pictures have 80 mm wheels, but the chassis can also work with our 90 mm wheels (and to a lesser, barely practical extent, our 70 mm wheels). Because the chassis is made for our micro metal gearmotors, you have a few options for gear ratios as with our Zumo sumo robots, but what’s really exciting about the Balboa design is that there is an extra stage of gear reduction for which you get five different options (all included, and you can easily change the gear ratio from whatever you initially choose). The design also allows the drive wheels to be supported on ball bearings, reducing the stress on the micro metal gearmotor output shafts.
The Balboa chassis has a built-in battery holder for six AA cells, which typically give you several hours of run time, even if you add some extra power-hungry electronics like a Raspberry Pi.
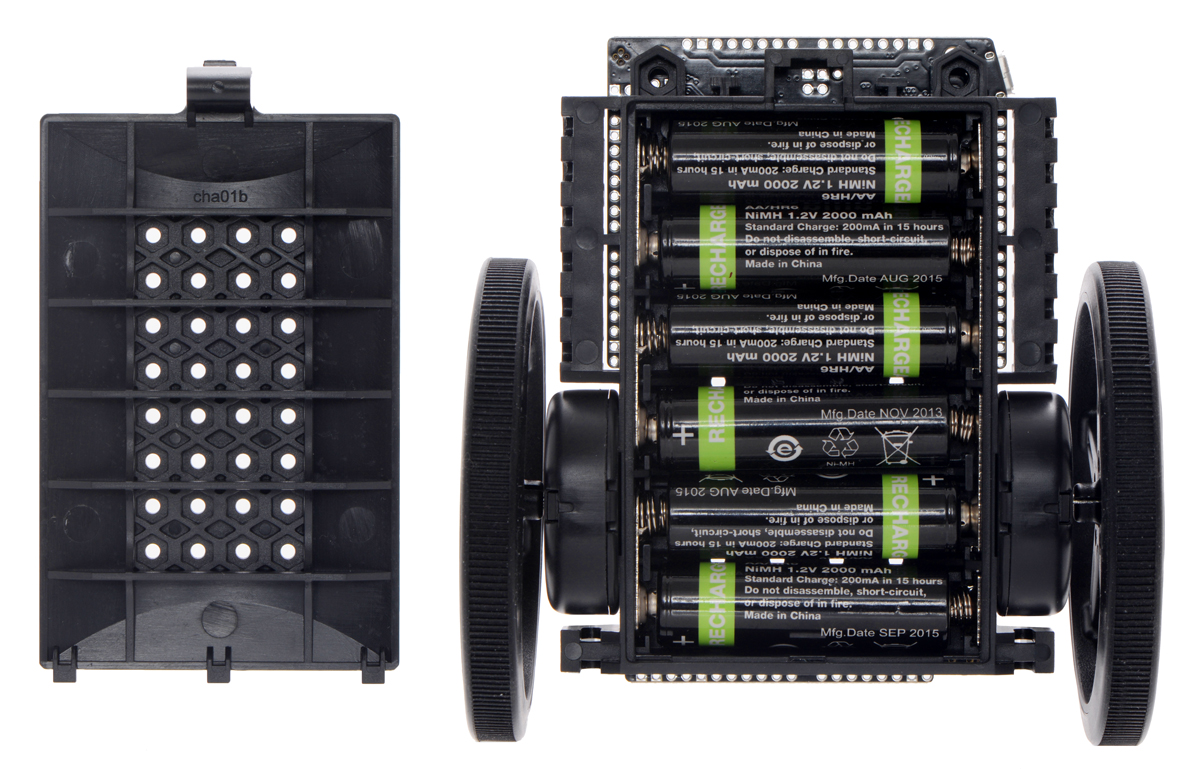 |
Balboa 32U4 Balancing Robot with battery cover removed. |
|---|
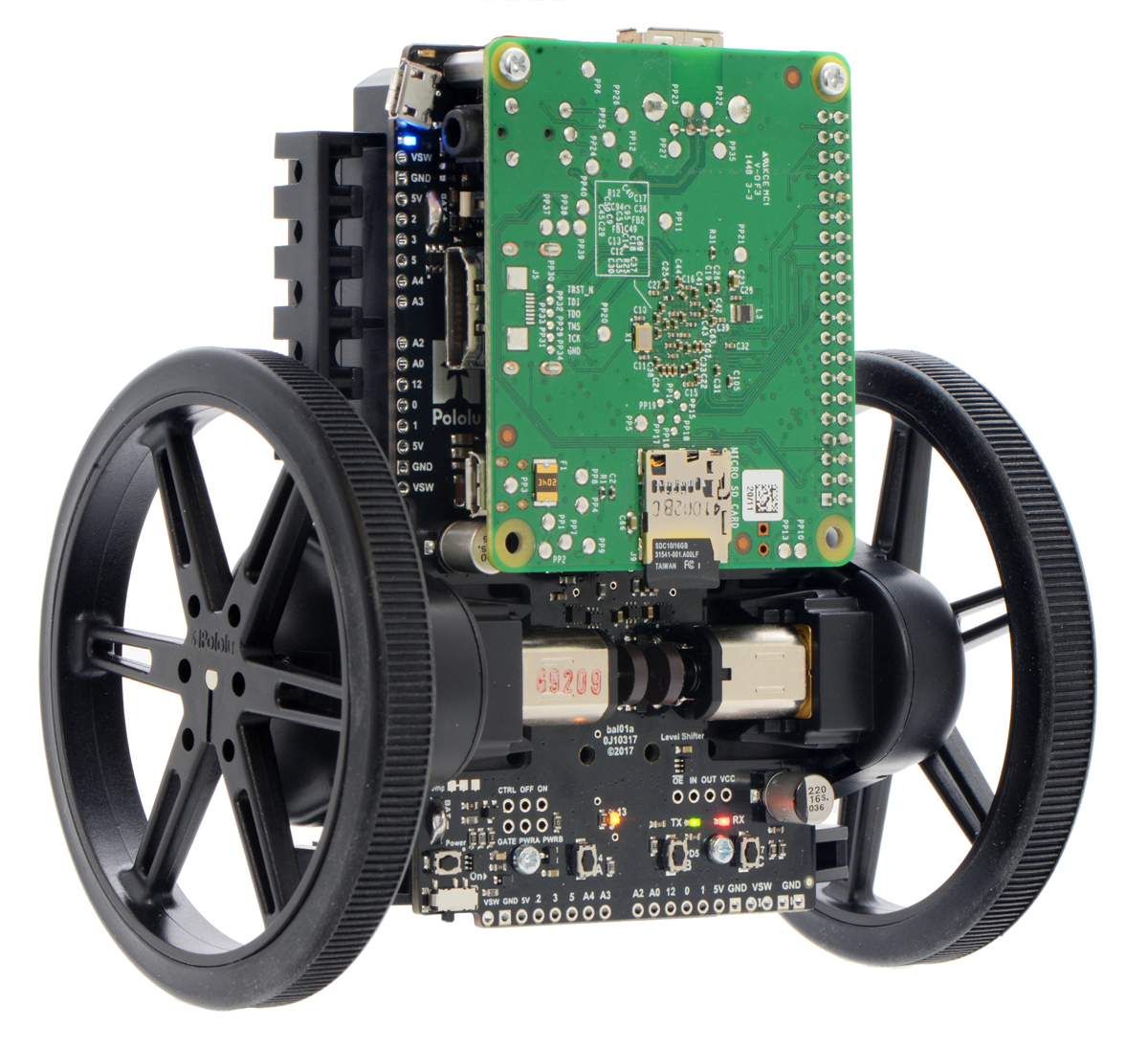
The main microcontroller is an Arduino-compatible ATmega32U4, which is powerful enough to read the on-board IMU sensors and encoders and to control the motors to balance the robot; it’s also great for introductory projects like line following or reading an RC receiver to make a radio-control balancing robot. For advanced projects, the Balboa is ready for you to add a Raspberry Pi computer to perform high-level algorithms while the ATmega32U4 microcontroller takes care of low-level tasks like motor control.
|
|
|
We will be adding more content to the Balboa’s product page and user’s guide, and we will have more blog posts about the Balboa robot. For today, we’ll end with some slow-motion footage of Balboa popping up on its own and then recovering when Paul knocks it around a bit:
Related products
Steel custom laser cutting available
 |
We’ve been offering quick-turn custom laser cutting service ever since “we” were just Candice and Jan operating a tabletop Epilog out of their home. Since then we’ve cut a wide assortment of customer designs including jewelry, engraved control panels, robot chassis, Christmas ornaments, and wedding invitations.
We started out mostly cutting acrylic, gradually moving into cutting a wider variety of plastics and wood. All along we’ve been improving our processes and increasing our capabilities by buying machines with bigger beds, better control systems, and more power. Without announcing it officially, we’ve been cutting metal for customers and ourselves over the past few years. For example, we cut our Basic Sumo Blade for the Zumo Chassis and the SMT stencils for our in-house electronics assembly. We’ve been refining our metal cutting processes and finding the best cut settings to minimize the chance of burring and dross, so most parts come out relatively clean and smooth to the touch.
The process quality has gotten to the level where we are comfortable announcing that metal laser cutting is generally available to customers!
|
|
|
||||||
|
|
|
||||||
|
|
|
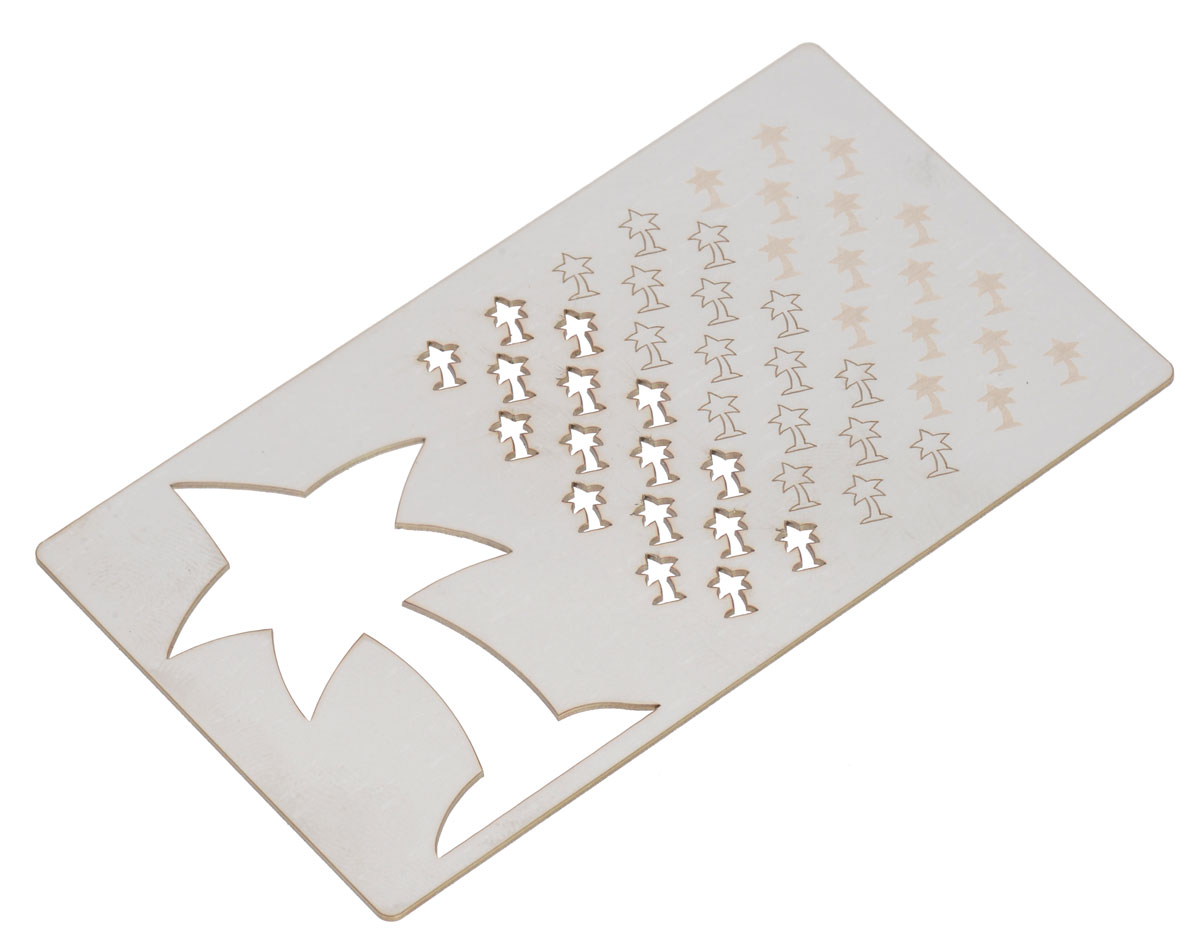
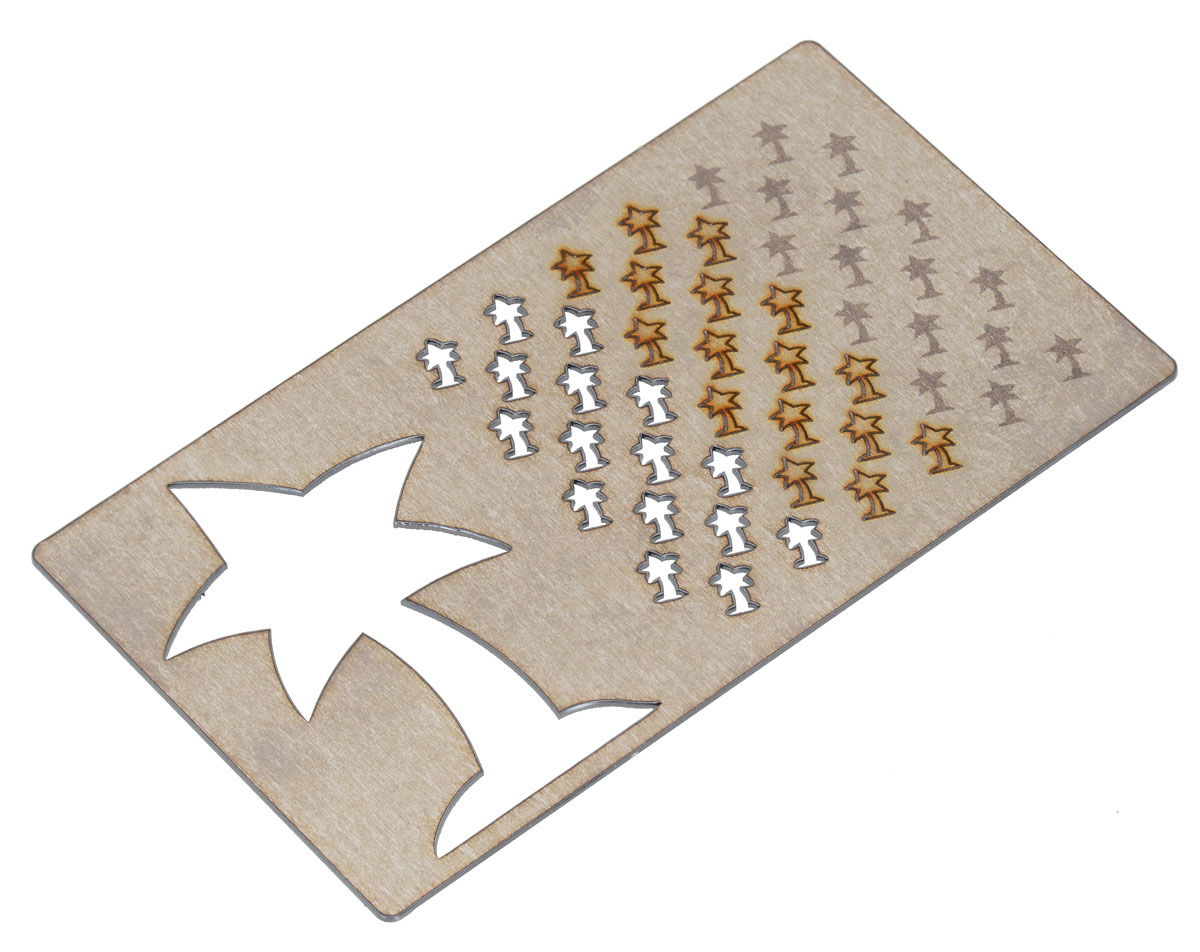
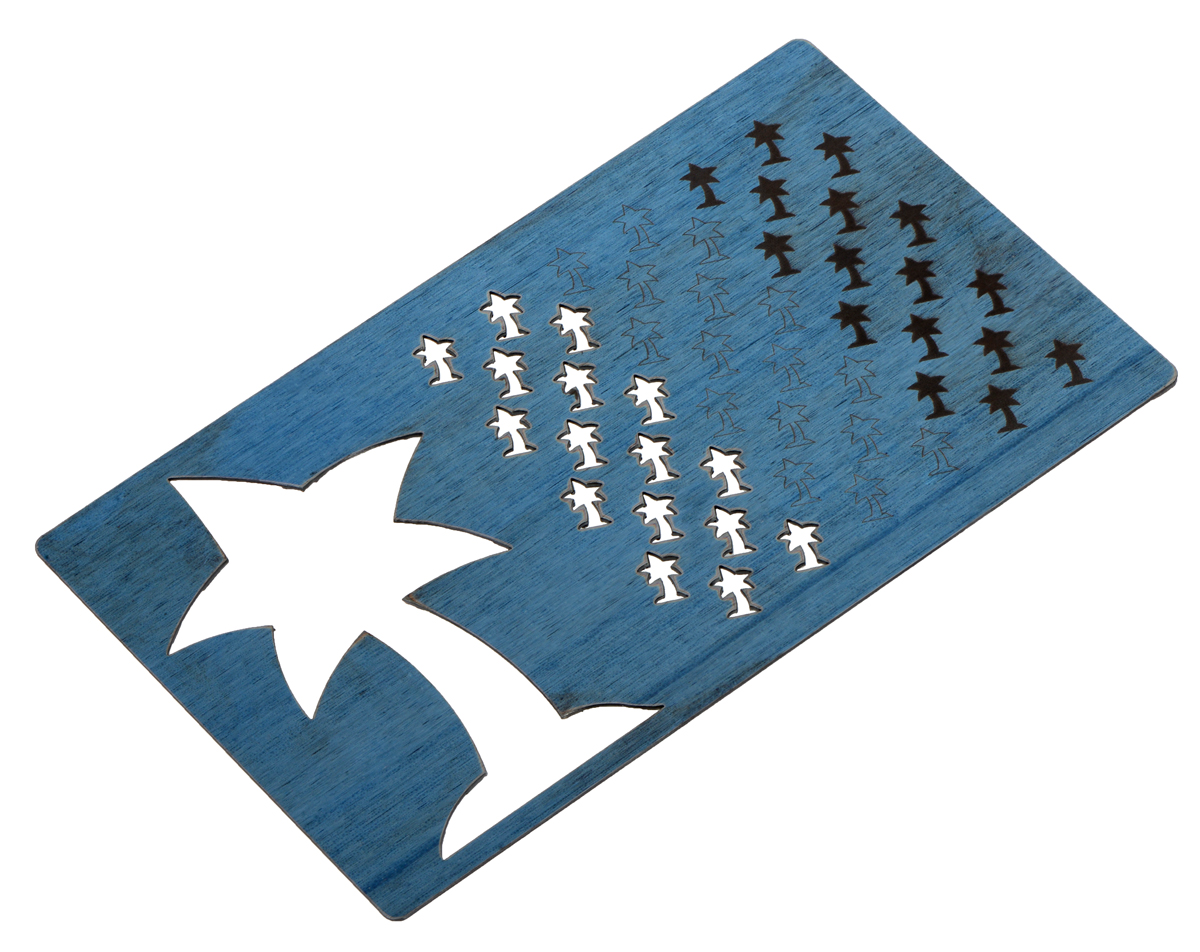
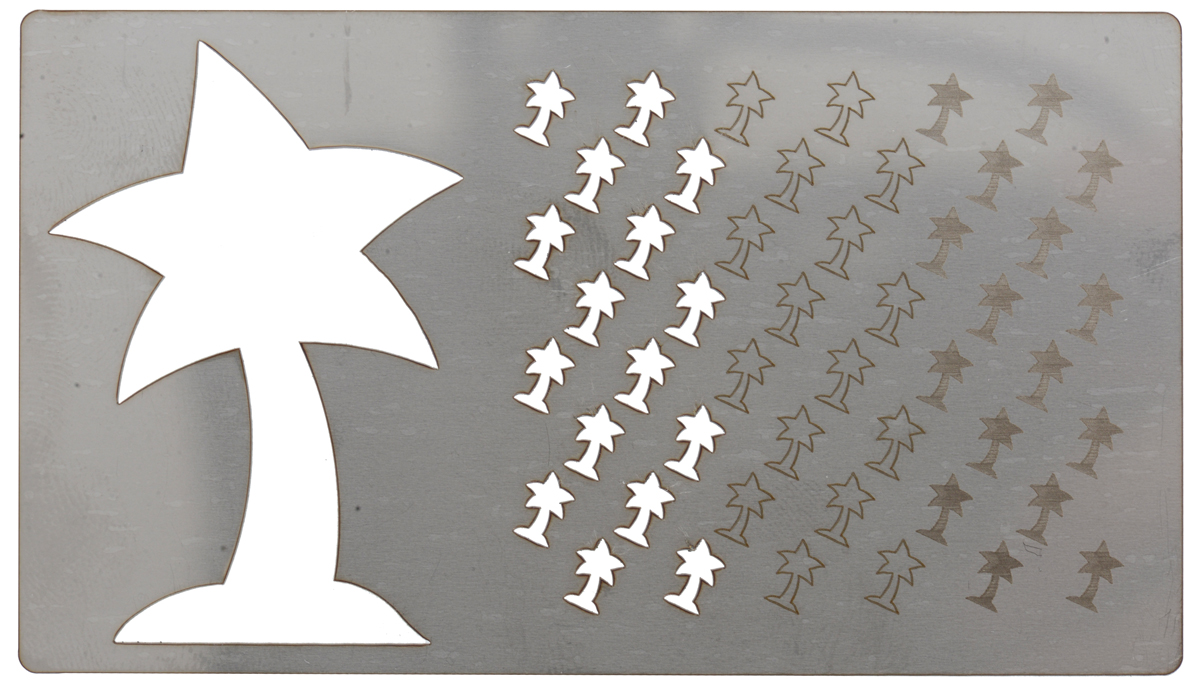
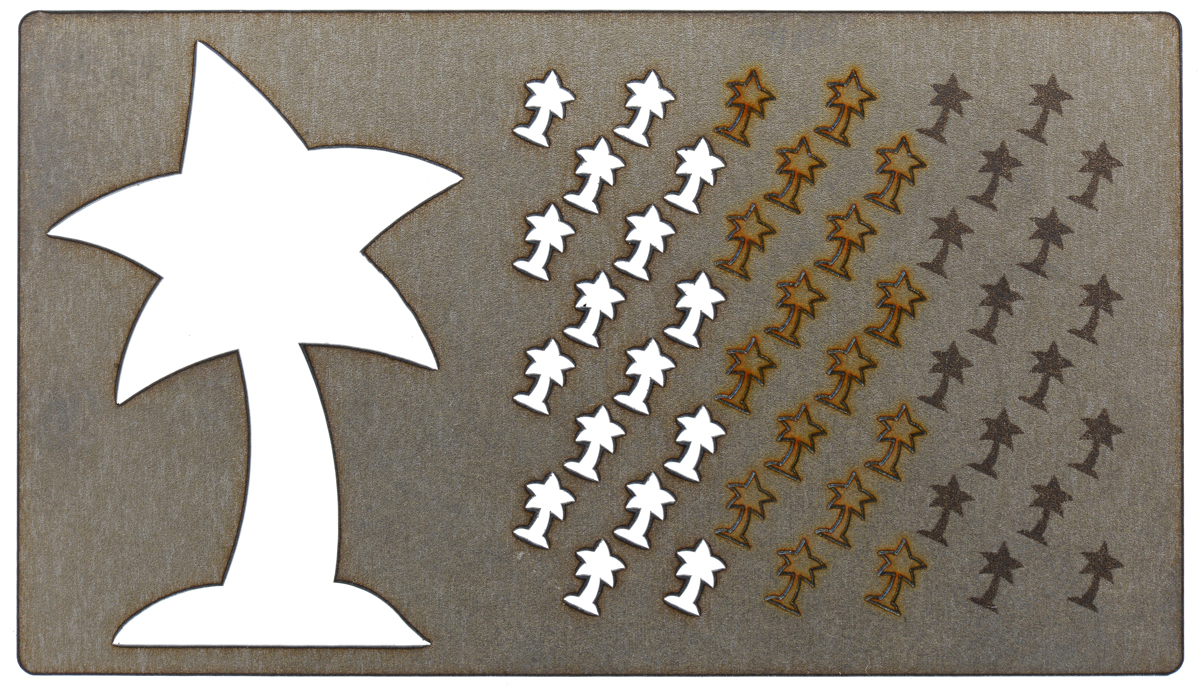

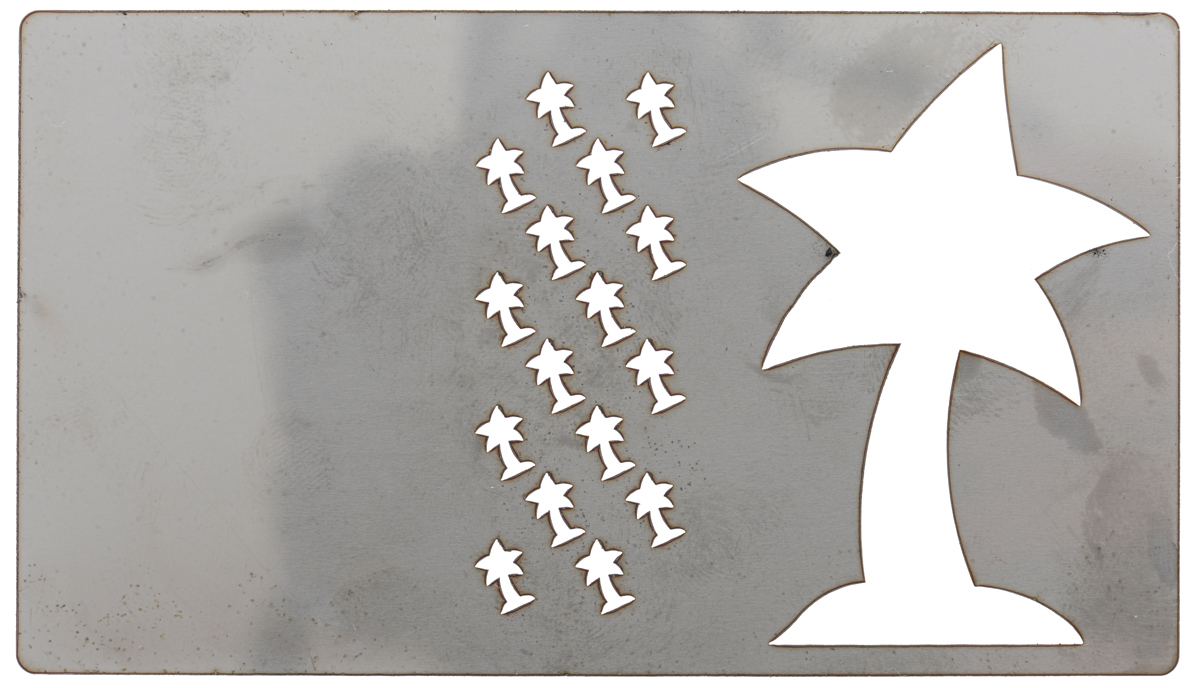
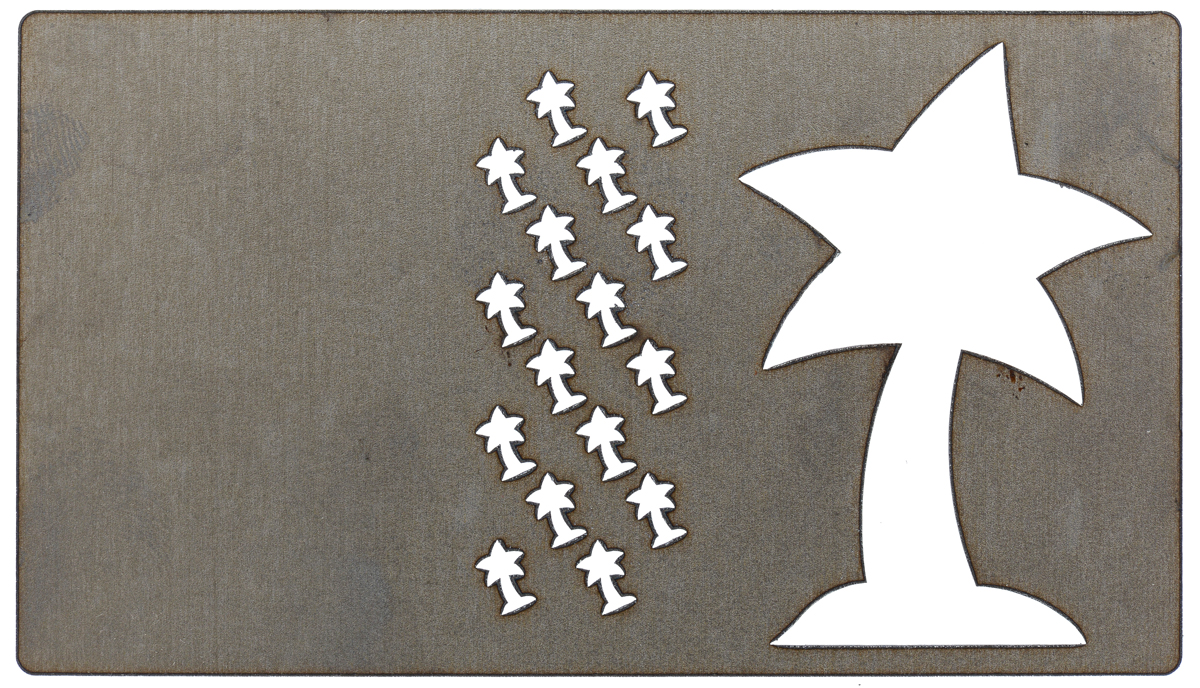
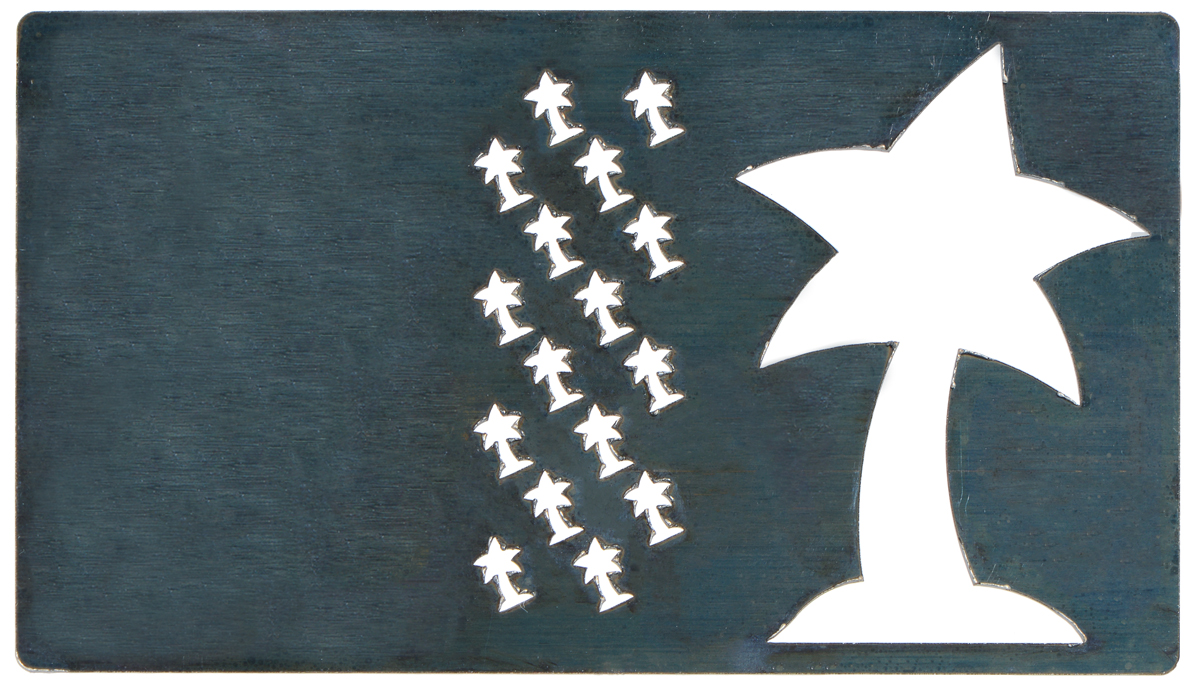
You can see in the pictures above that laser-cut steel parts have a slight discoloration along the laser-cut edges caused by the chemical reaction that takes place when cutting. Depending on the steel type and whether the cuts are through the material, vector-etched line art, or raster-engraved filled-in areas, the discoloration is different (some tend to be brownish while others are a dark gray). We do not guarantee that parts will be free of blemishes; we ship the parts without any post processing, and we currently do not offer additional services such as deburring, tumbling, or bending.
As stocked materials (shown on our quote request page), we carry #304-2B stainless steel in 0.024″, 0.030″, 0.036″, 0.048″, 0.060", and mild steel in 0.030″ and 0.060″. We can arrange to use material you ship to us, but keep in mind that steel is the only metal we can cut. We cannot cut copper, brass, titanium, aluminum, or precious metals.
To get started on having your laser-cut steel parts cut, submit a quote request here.
Related products


New product: Romi 32U4 Control Board
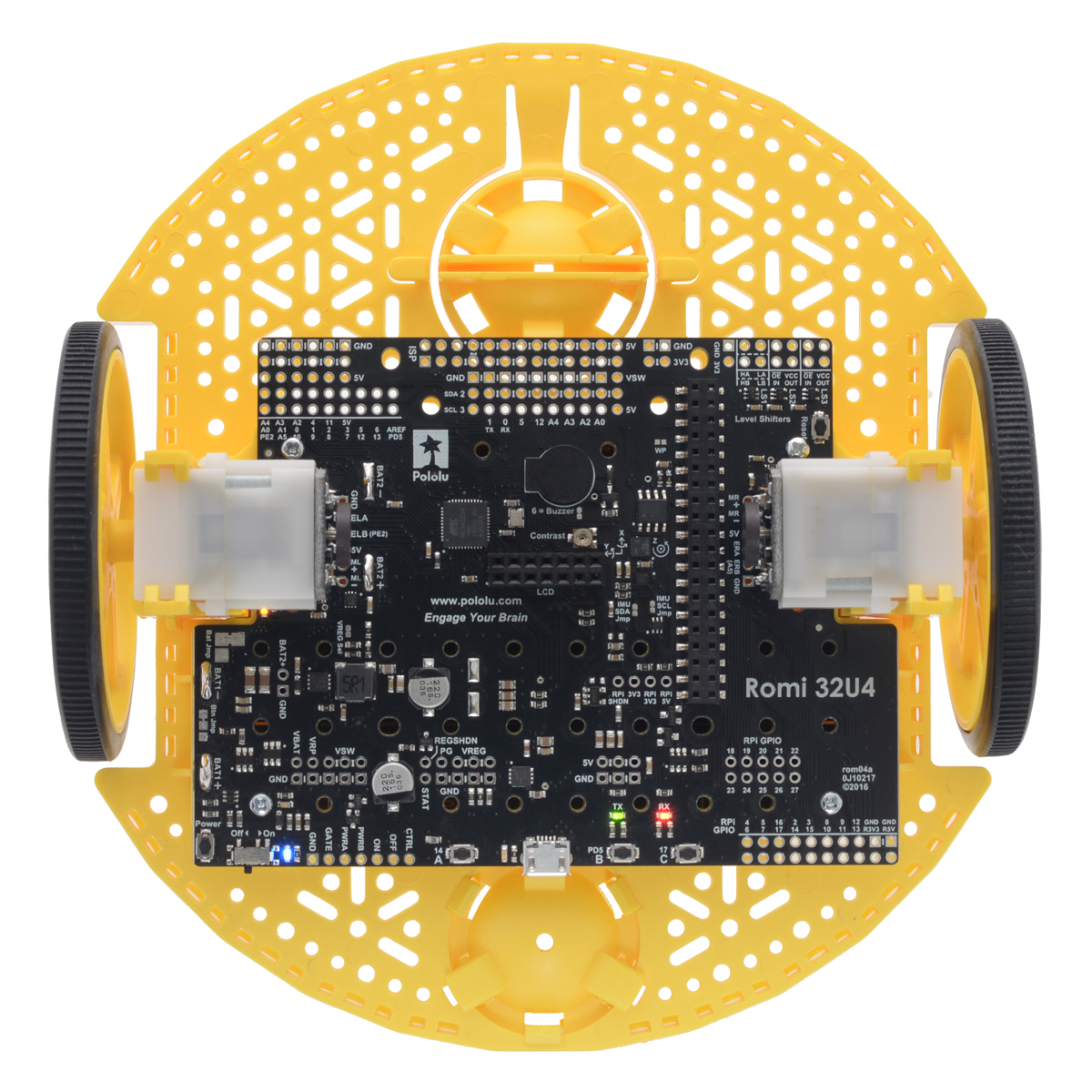 |
What do you need to turn a Romi chassis into a functioning robot? Here are some Romi projects from the community, as well a couple of our example builds:
|
|
|
|
|
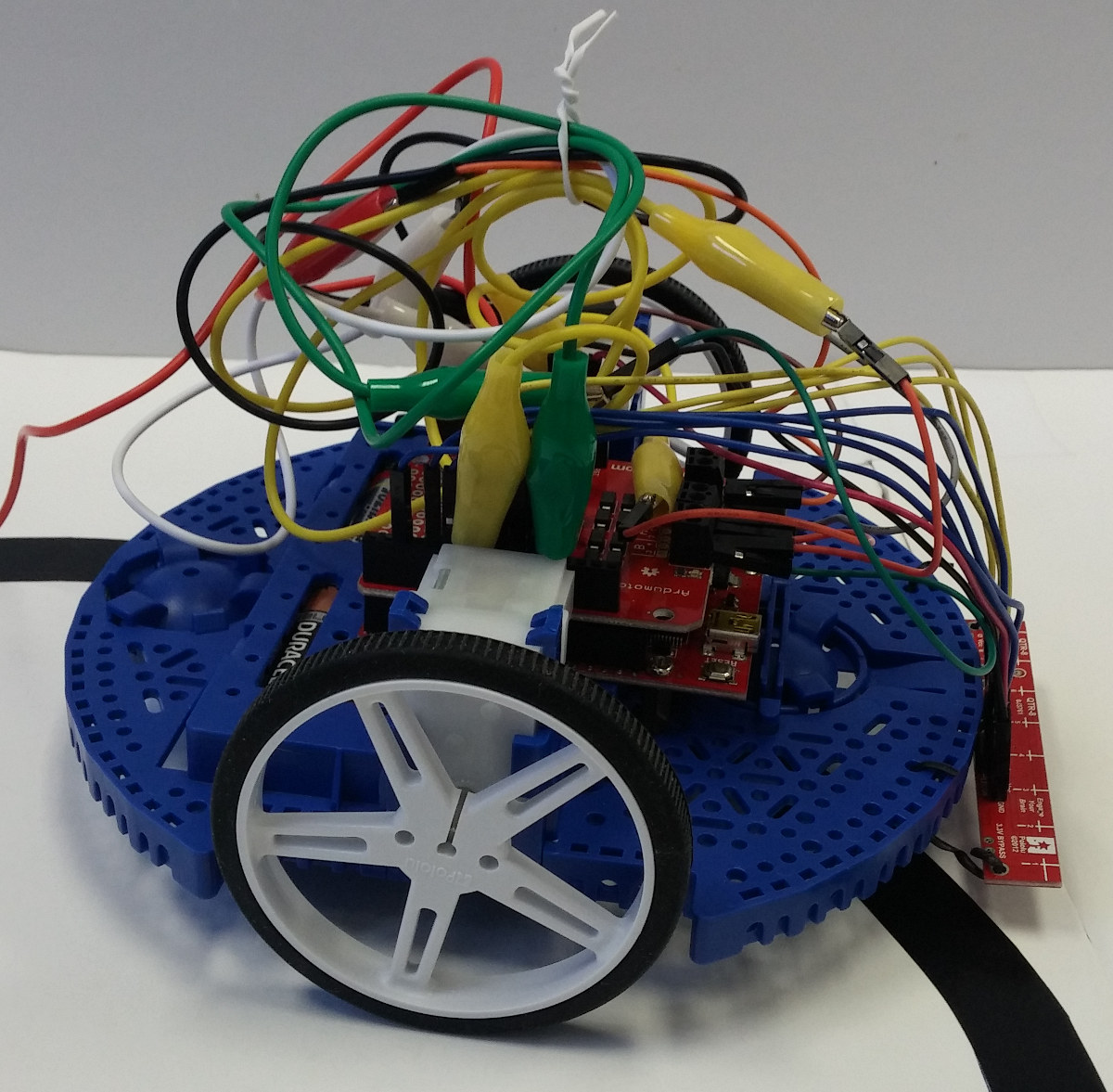

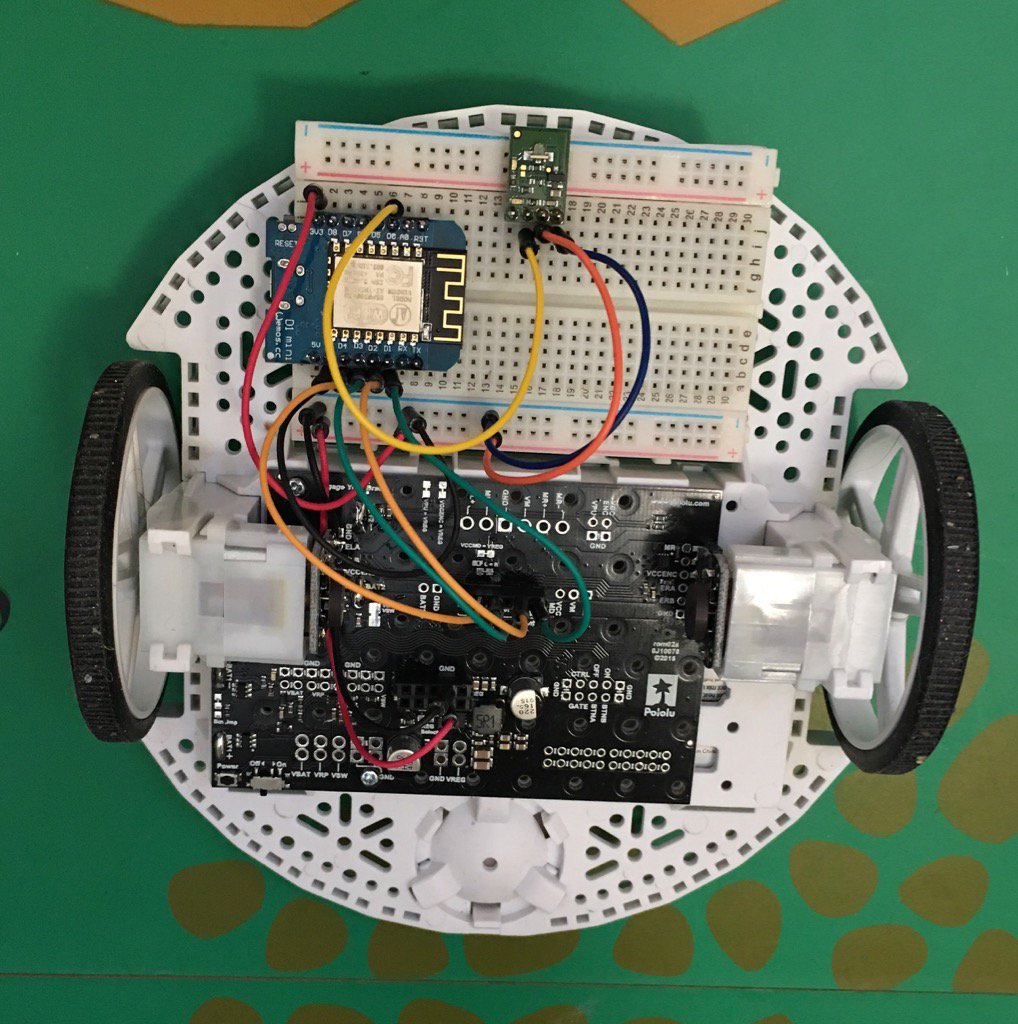
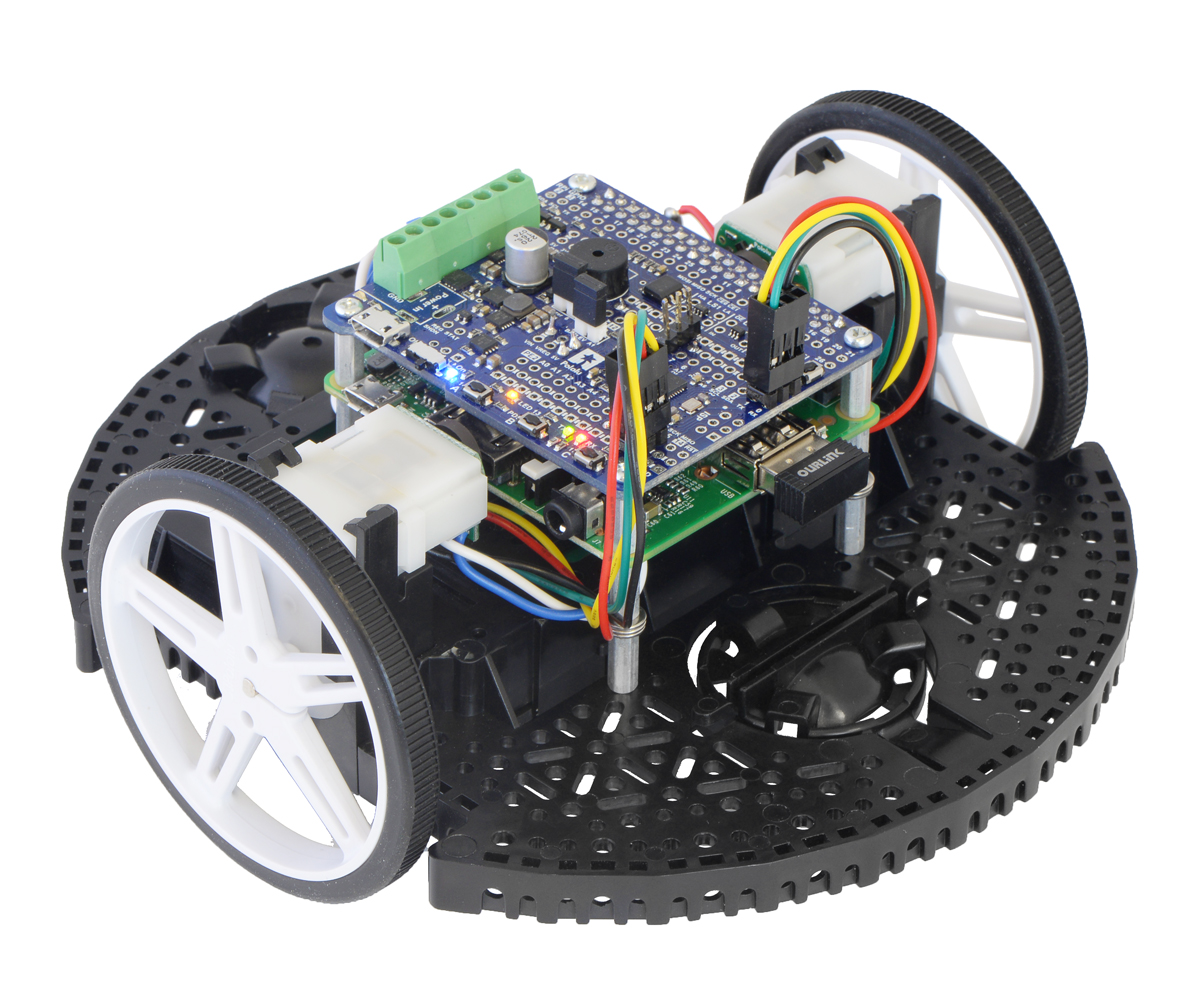

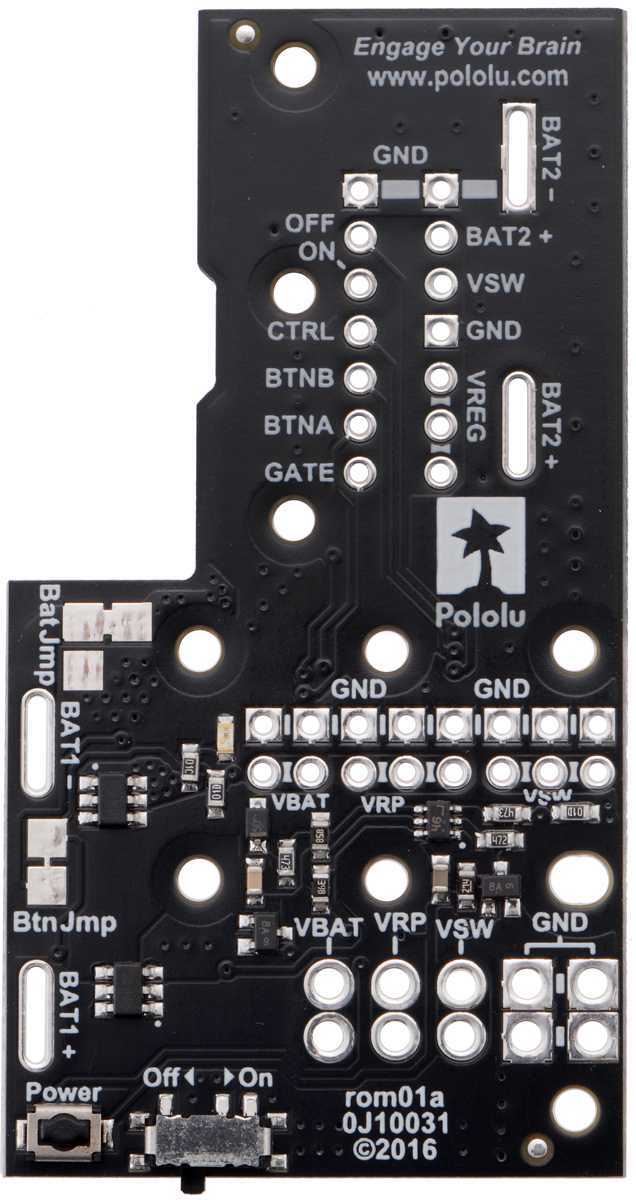
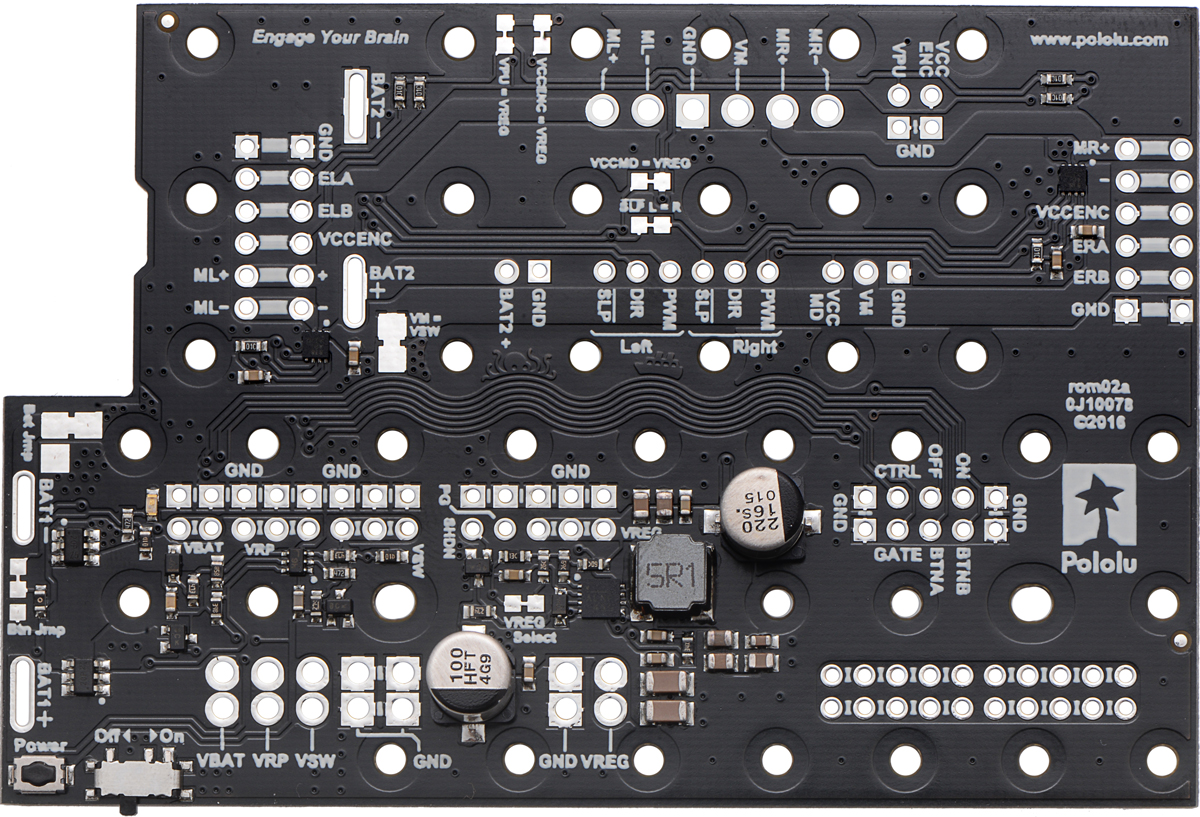
A variety of controllers can be used with the Romi, but until now you have had to figure out lots of wiring to connect everything together. You will always need some wiring to connect your own sensors or other devices, but we have been trying to make it easier to get started, beginning with the Romi power distribution board and motor driver board, which help simplify some of the more difficult parts. Our new Romi 32U4 Control Board is the culmination of this product line: a complete controller solution for the Romi that integrates power, motor control, and an Arduino-compatible microcontroller.
|
|
|
|||
Romi power distribution board, motor driver board, |
|||||
|---|---|---|---|---|---|
Here is how it looks when connected to a Romi Chassis with motors and encoders plugged in, as well as the optional LCD:
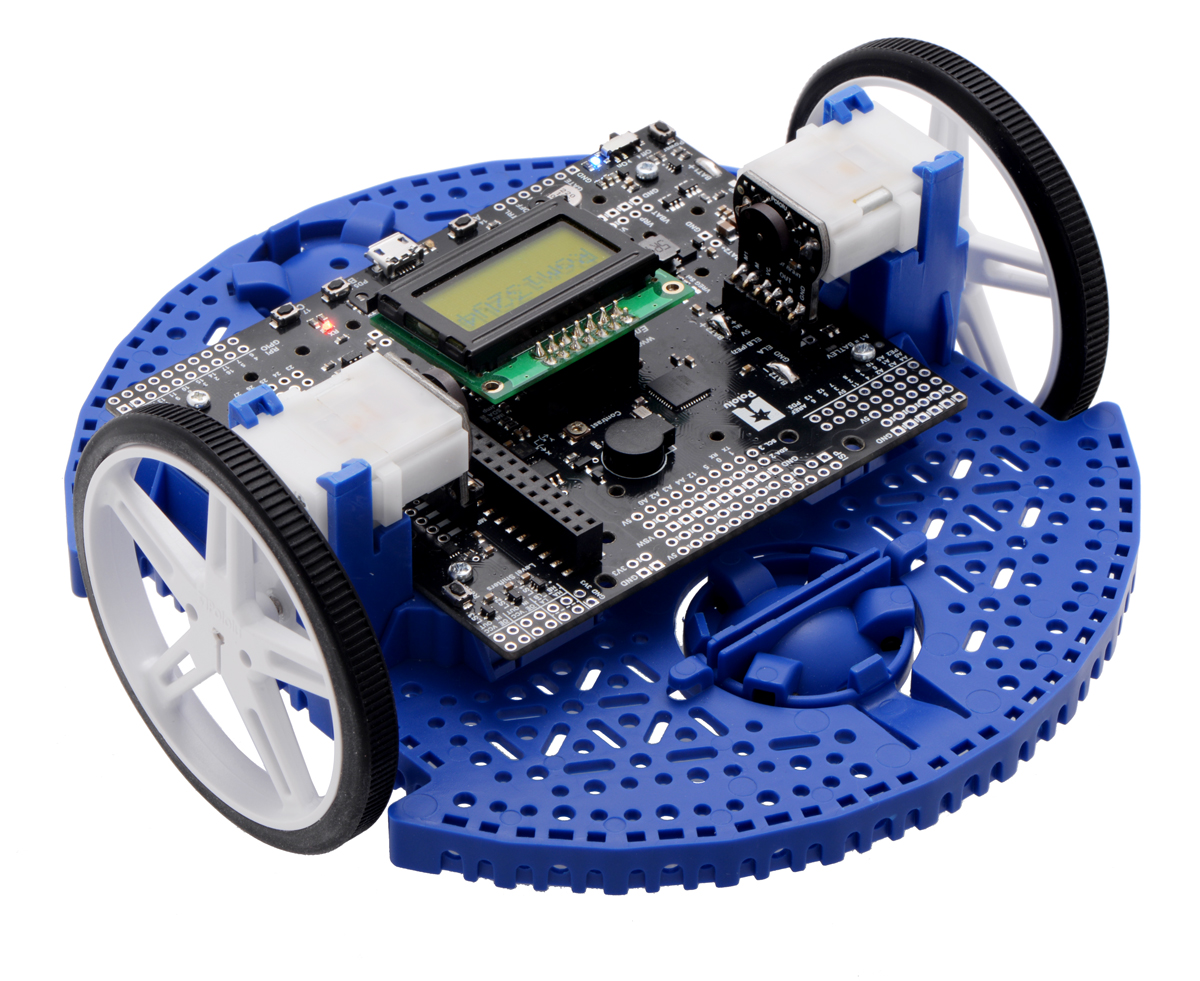 |
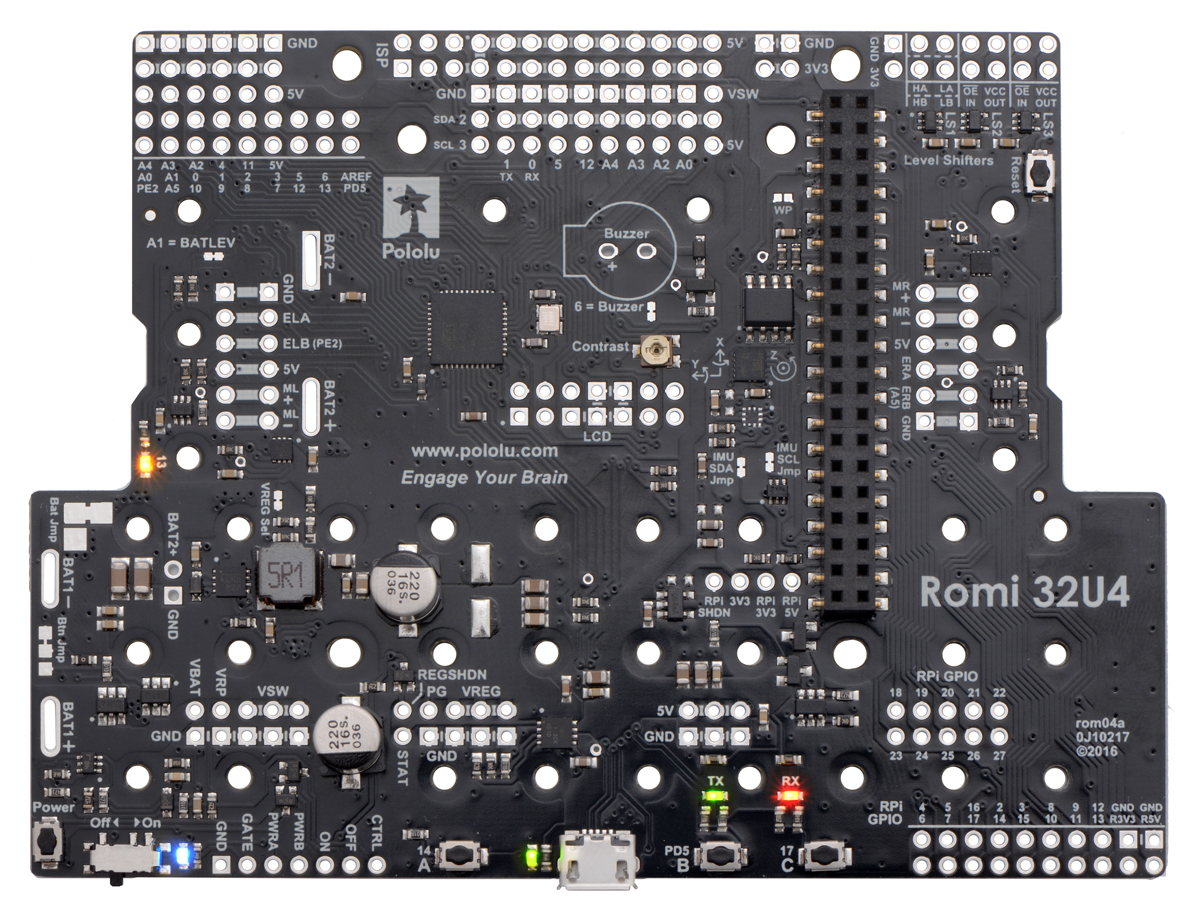
Features of the Romi 32U4 Control Board
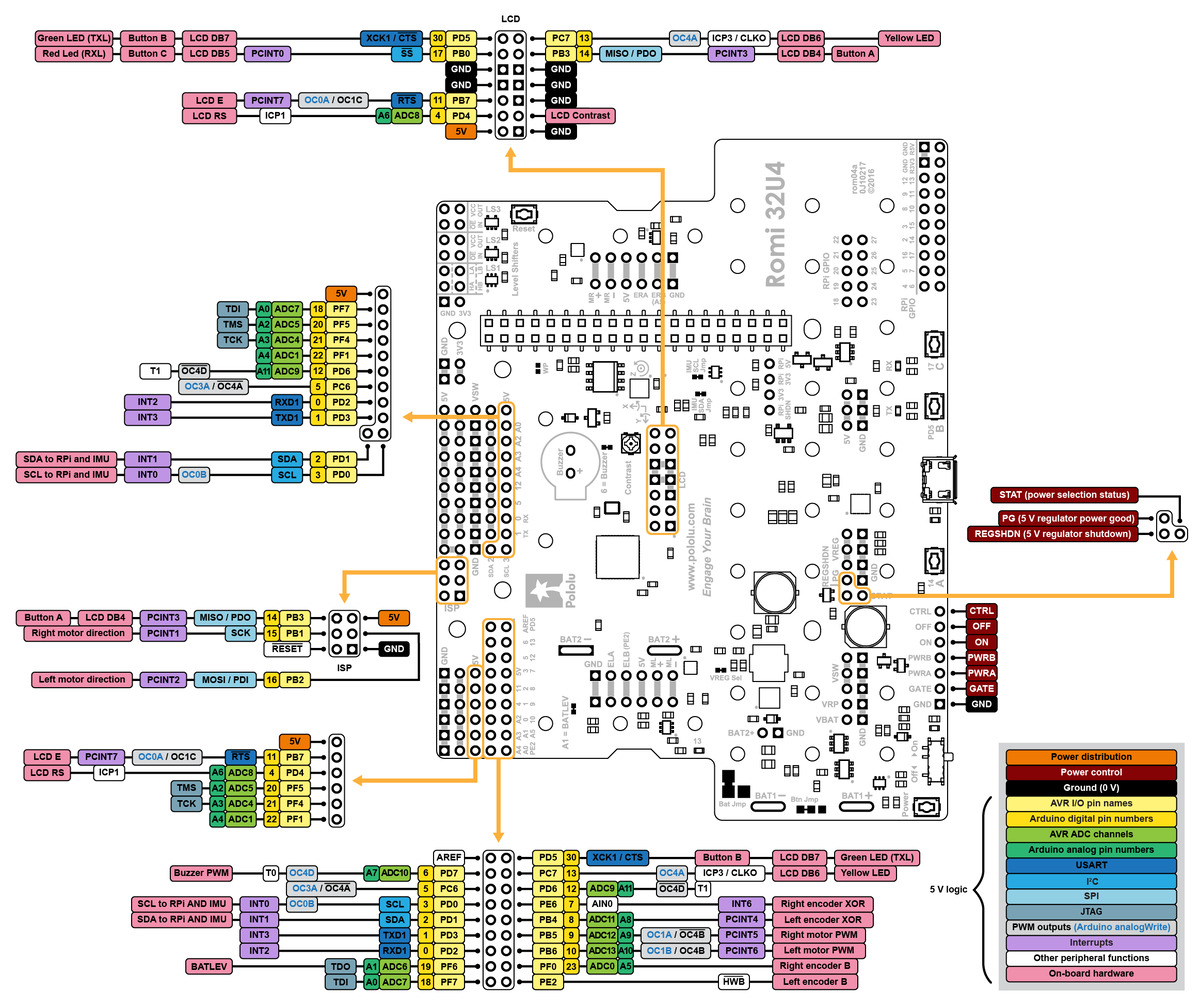 |
Pinout diagram of the Romi 32U4 Control Board (ATmega32U4 pinout, peripherals, and board power control). |
|---|
- Reverse-protected battery power switch circuit
- Powerful 5 V, 2 A switching regulator
- Dual 1.8 A DRV8838 motor drivers
- ATmega32U4 microcontroller with Arduino-compatible USB bootloader
- 16 free general-purpose I/O ports including 10 analog inputs
- LCD connector
- Buzzer
- Three user buttons
- Five indicator LEDs (2 for power, 3 user-controllable)
- Battery voltage monitoring
- Quadrature encoder inputs
- Four general-purpose level shifters
- 3-axis I²C accelerometer
- 3-axis I²C gyroscope
- Raspberry Pi connector with I²C interface and HAT EEPROM
Raspberry Pi interface
Microcontrollers like the ATmega32U4 are great for fast, timing-sensitive operations such as reading sensors or driving servos, but their computing power is very limited compared to devices like the Raspberry Pi. That is why we built a Raspberry Pi interface into this board: to give you the option to expand your robot beyond what is possible with a microcontroller. This could be useful for anything from advanced applications like computer vision or room mapping to simply letting your robot share status updates on Twitter. Here is a Romi assembled with a Raspberry Pi:
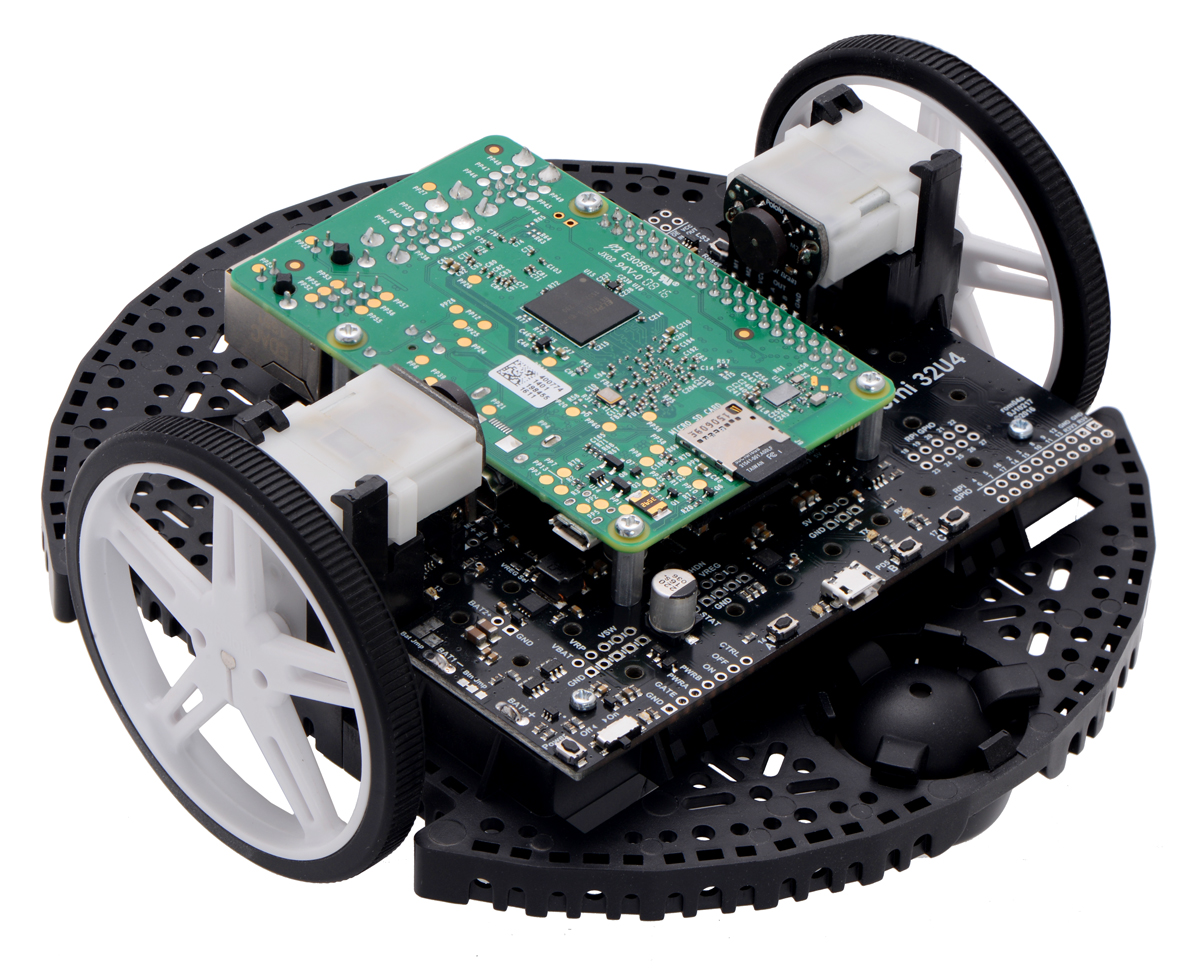 |
When connected, the control board supplies power to the Raspberry Pi and connects to it as an I²C slave device. We include the ID EEPROM required by the HAT specification, though we have not found it particularly useful, so we ship it blank and unlocked for you to experiment with.
Our Arduino library gives example code for I²C connectivity, and you can check out our Raspberry Pi tutorial for the A-Star 32U4 Robot Controller, which we will be updating for the Romi 32U4 Control board.
For more information about the Romi 32U4 Control Board or to order, please see its product page.
Related products



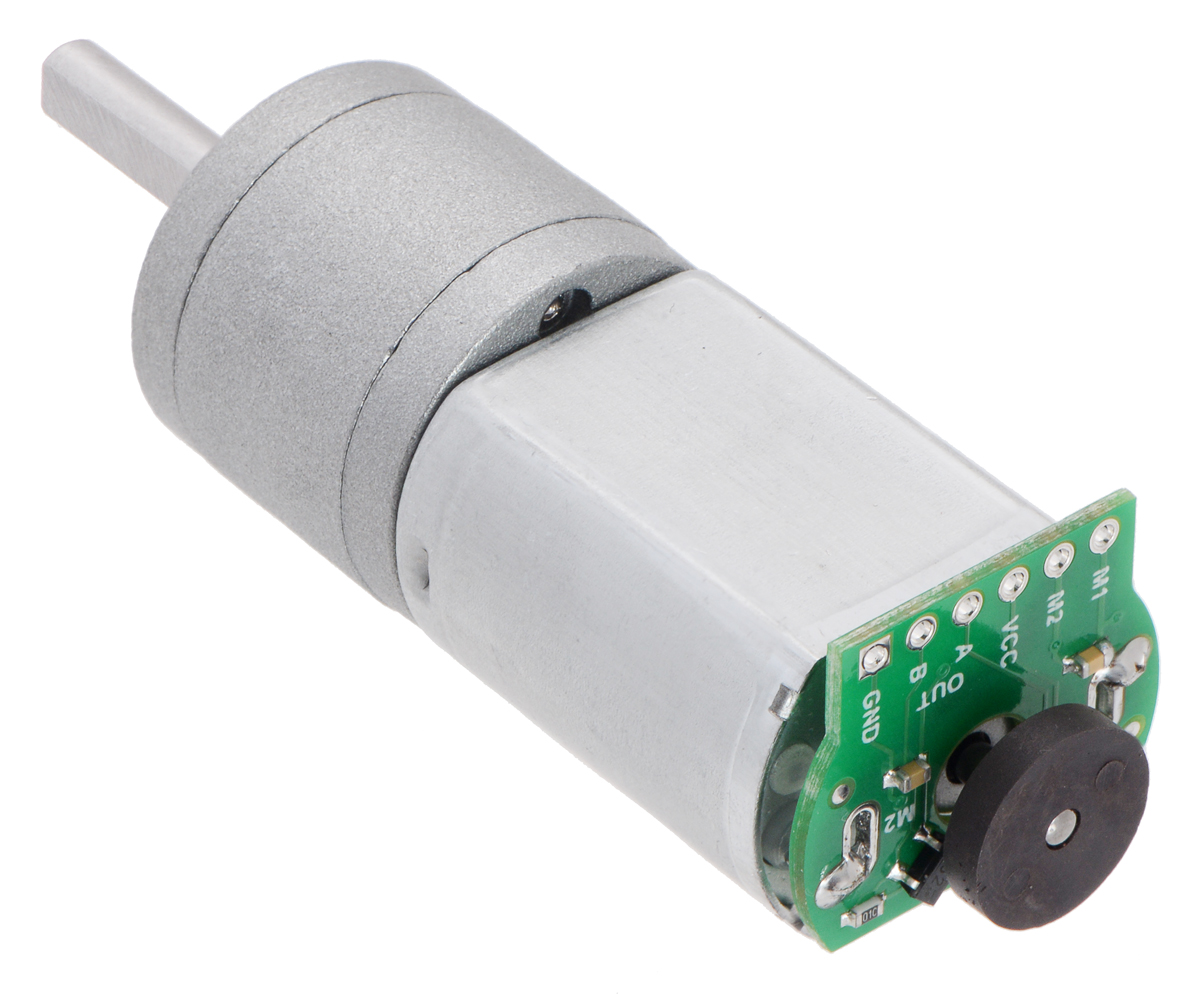
New 20D mm metal gearmotors
Our vast assortment of metal gearmotors has gotten even bigger! With over 100 micro metal gearmotor options and nearly 100 25D mm metal gearmotor versions to choose from, the next step seemed clear: expand our offering of 20D mm metal gearmotors, which fit nicely between the smaller micro metal gearmotors and larger 25D mm metal gearmotors. We have replaced our initial four 20D mm options with twelve entirely new gear ratios that feature more efficient gearboxes and much longer output shafts.
|
|
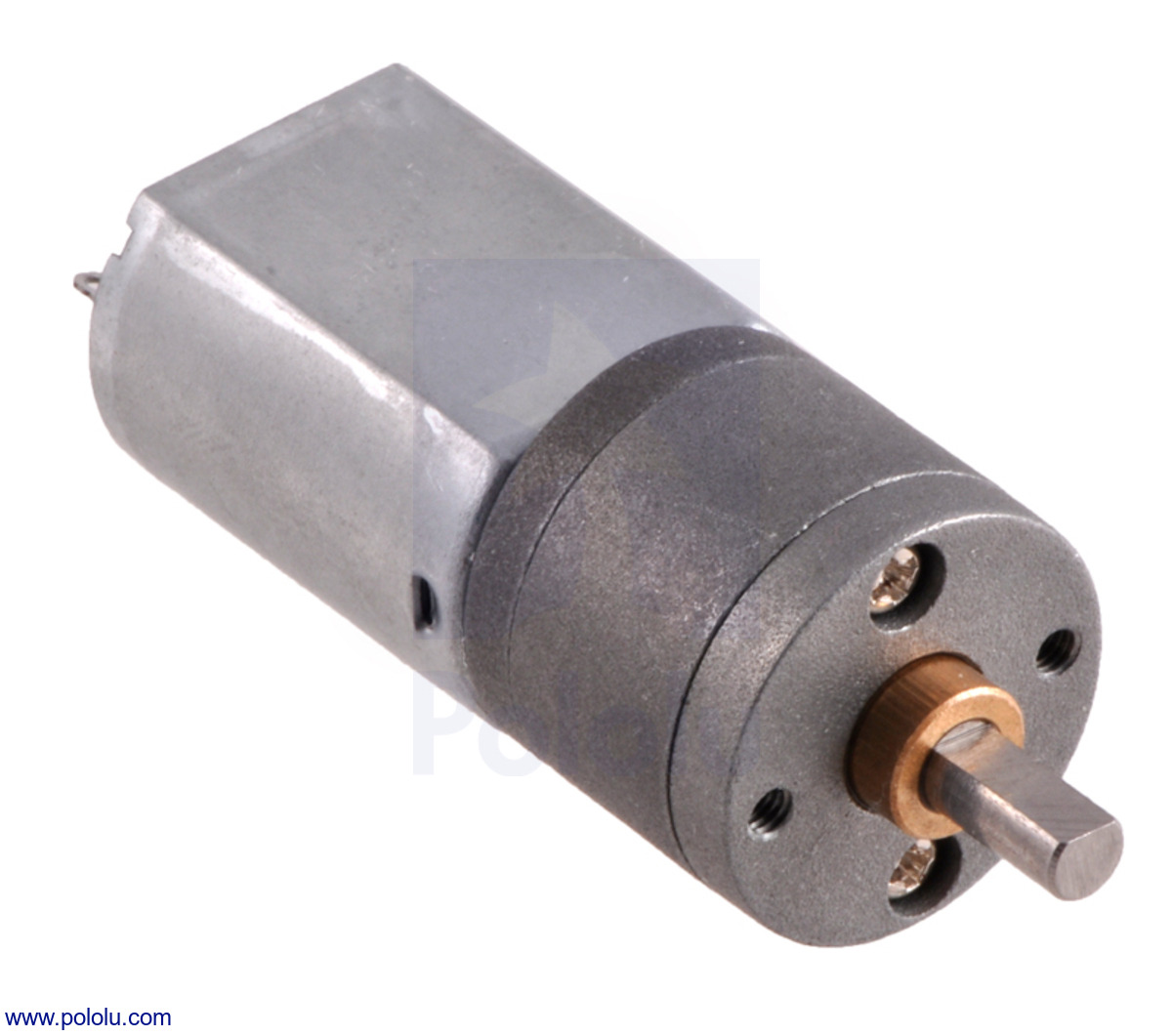
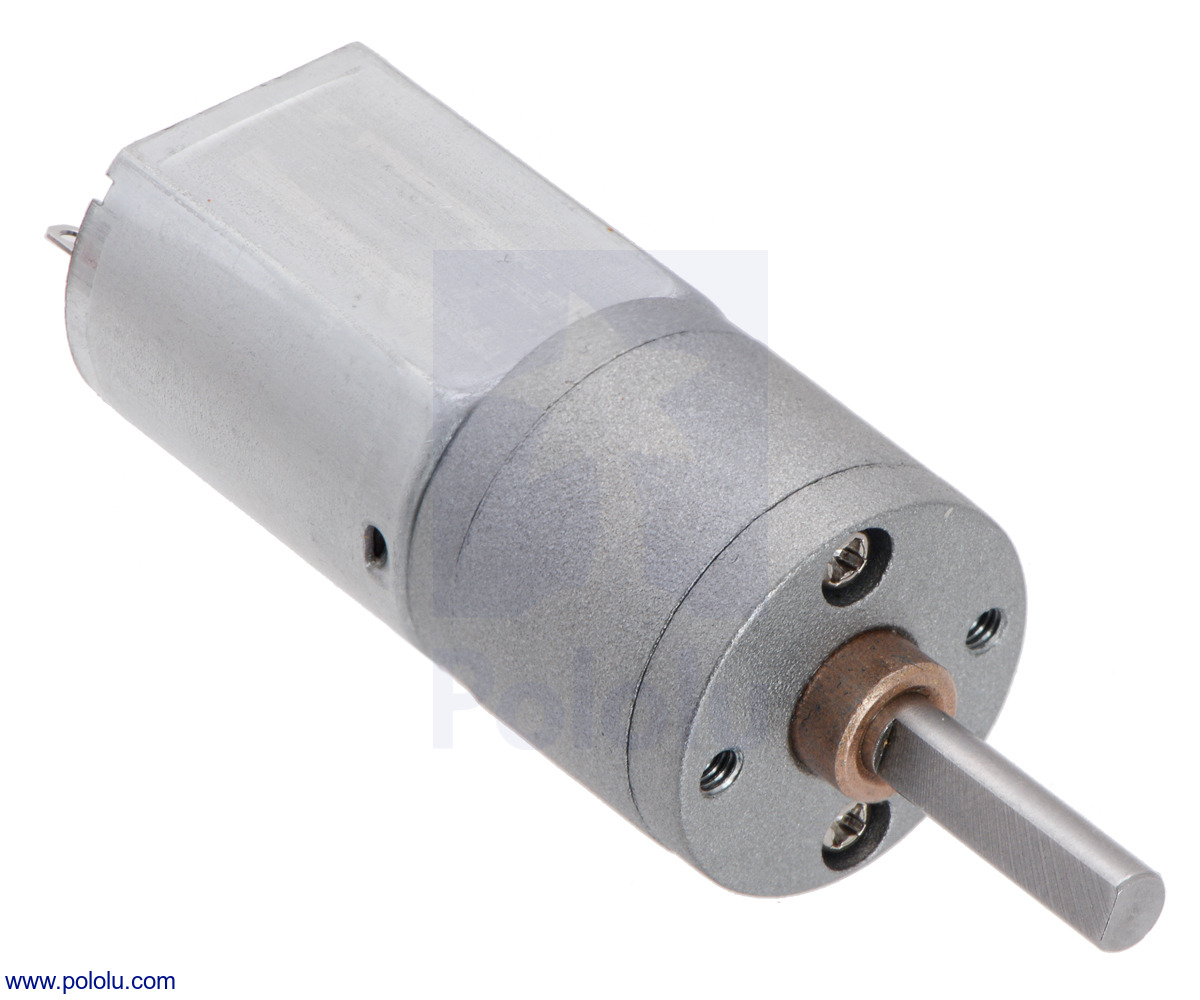
The motor portion is unchanged, and we now also offer versions with an extended motor shaft that rotates at the same speed as the input to the gearbox and can be used to add an encoder, such as our new magnetic encoder for 20D mm metal gearmotors, for closed-loop speed or position control.
|
|

The table below shows our current offering of 20D mm metal gearmotors:
| Rated Voltage |
Stall Current @ Rated Voltage |
No-Load Speed @ Rated Voltage |
Approximate Stall Torque @ Rated Voltage |
 Single-Shaft (Gearbox Only) |
 Dual-Shaft (Gearbox & Motor) |
|---|---|---|---|---|---|
| 6 V | 3.2 A | 560 RPM | 30 oz-in | 25:1 6V | 25:1 6V dual-shaft |
| 450 RPM | 35 oz-in | 31:1 6V | 31:1 6V dual-shaft | ||
| 225 RPM | 60 oz-in | 63:1 6V | 63:1 6V dual-shaft | ||
| 180 RPM | 75 oz-in | 78:1 6V | 78:1 6V dual-shaft | ||
| 140 RPM | 90 oz-in | 100:1 6V | 100:1 6V dual-shaft | ||
| 110 RPM | 100 oz-in | 125:1 6V | 125:1 6V dual-shaft | ||
| 90 RPM | 115 oz-in | 156:1 6V | 156:1 6V dual-shaft | ||
| 70 RPM | 125 oz-in | 195:1 6V | 195:1 6V dual-shaft | ||
| 55 RPM | 140 oz-in | 250:1 6V | 250:1 6V dual-shaft | ||
| 45 RPM | 150 oz-in | 313:1 6V | 313:1 6V dual-shaft | ||
| 35 RPM | 160 oz-in | 391:1 6V | 391:1 6V dual-shaft | ||
| 29 RPM | 170 oz-in | 488:1 6V | 488:1 6V dual-shaft | ||
We also have 12V versions on the way, so stay tuned for more information!



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









