Pololu Blog » User Profile: Brandon » Posts by Brandon »
Posts by Brandon (Page 2)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Brandon's mini sumo robot: Black Mamba
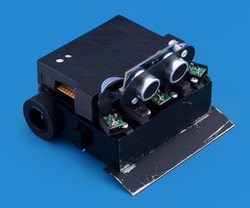
Before I started designing my entry into this year’s LVBots mini sumo competition, I watched several videos of other competitions. I noticed a majority of the victories came from engaging the opponent from the side or back; a pattern I also noticed during the last LVBots mini sumo competition. For that competition, I made a robot that used a blade and sensors on the front and back of the robot (basically making the robot have two fronts and no back). However, my strategy in that competition was to roam the ring and search for the opponent, which I suspect increased the chances of the opponent engaging from a suboptimal angle. This time, I wanted to try having my robot spin in place looking for the opponent and striking once it was found. This ultimately resulted in my newest mini sumo robot, Black Mamba. For those unfamiliar, a black mamba is a snake with a reputation for being highly aggressive and is one of the longest and fastest-moving snakes in the world. A black mamba’s venom is highly toxic, and it is capable of striking at considerable range, occasionally delivering a series of bites in rapid succession. Black Mamba is also Kobe Bryant’s self-appointed nickname (yes, I am a Lakers fan). Continued…
Raspberry Pi Solar Tracker
Jay Doscher posted on his blog at Polyideas.com about his 2-axis solar tracker designed to provide the optimal amount of power output with a portable setup. In the build, Jay uses a Raspberry Pi A+ topped with our Dual MC33926 Motor Driver for Raspberry Pi to control the motion of the system, which is accomplished using a Concentric 4″ linear actuator with feedback. In lieu of a GPS unit, the tracker uses hard-coded longitude and latitude coordinates with Pysolar, an open-source Python library, to calculate the sun’s predicted position. The system keeps the solar panel pointed at the calculated position with the help of a Razor IMU from SparkFun. The video above is time lapse footage of a mechanical test of the system that shows the unit tracking the sun (although it is indoors).
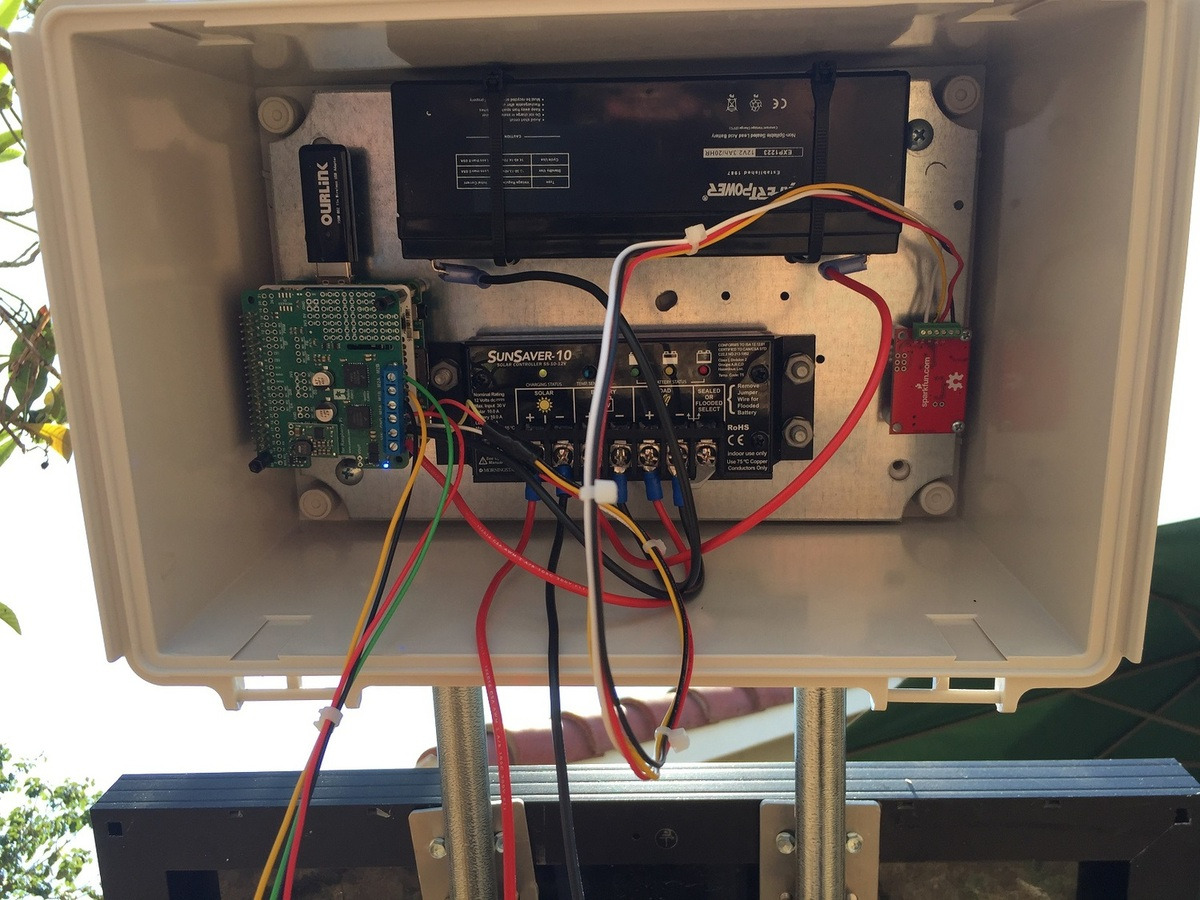 |
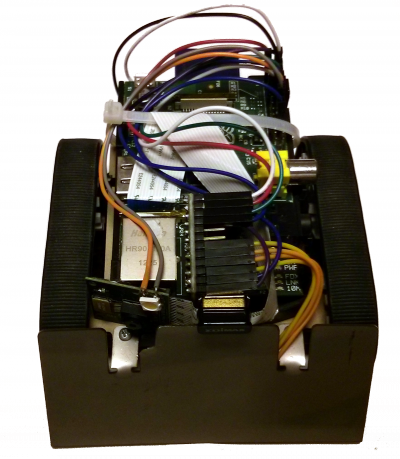
In the picture above, you can see the Raspberry Pi and dual MC33926 driver board on the left and the IMU on the right. The Dual MC33926 Driver for Raspberry Pi fits on top of the Raspberry Pi mainboard, eliminating a lot of wiring and making it easy to use while also leaving the setup looking clean and organized. Additionally, the Dual MC33926 Driver for Raspberry Pi provides a set of three through-holes where an appropriate voltage regulator can be conveniently connected, allowing the motor supply to also power the Raspberry Pi. You can see one of our D24V10F5 switching step-down regulators mounted on top of the dual MC33926 driver board to serve this purpose in the picture above as well.
 |
This project was also a 2015 Hackaday Prize entry and made it to the quarterfinals!
For more information about this project, see Jay’s blog post, which has additional photos and details including a parts list and links to his code.
Related products




Robot contest in Mexico to be held at 14th National Congress of Mechatronics
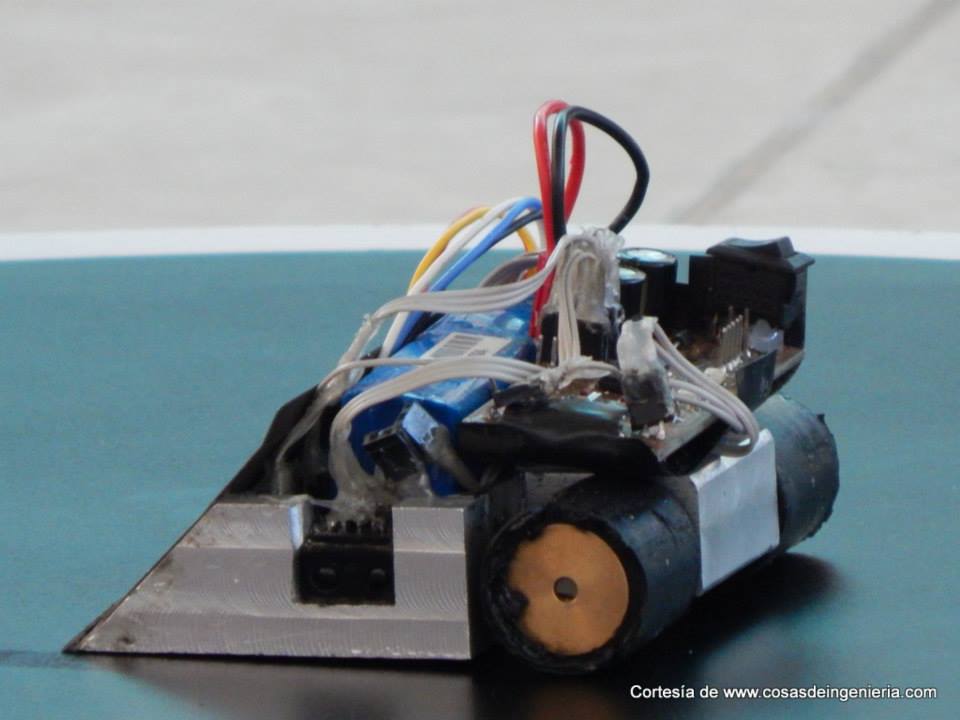 |
A contact at Mexican distributor Cosas de Ingeniería wrote to let us know about a contest he is helping organize in Juriquilla, Querétaro, Mexico. The Mexican Mechatronics Asociation (Asociación Mexicana de Mecatronica A.C.) will be hosting the 14th National Congress of Mechatronics (14º Congreso Nacional de Mecatrónica) 2nd Robotics Competition on October 15th through 17th this year. The three-day event will host several robotic competitions:
- Autonomous Vehicle Competition (based on the Sparkfun Autonomous Vehicle Competition)
- Insect Robot Race (insectoid robots try to be the first to travel 2 m over obstacles and uneven surfaces)
- Mini-Sumo Competition (autonomous robots, similar to the one pictured above and our Zumo robots, fight to stay in a designated area)
- Line Following Competition (autonomous robots follow a line-marked course as quickly as they can)
To keep up with the latest news about this competition, see the RoboticaAMM Facebook page, which also has dozens of pictures from the last competition.
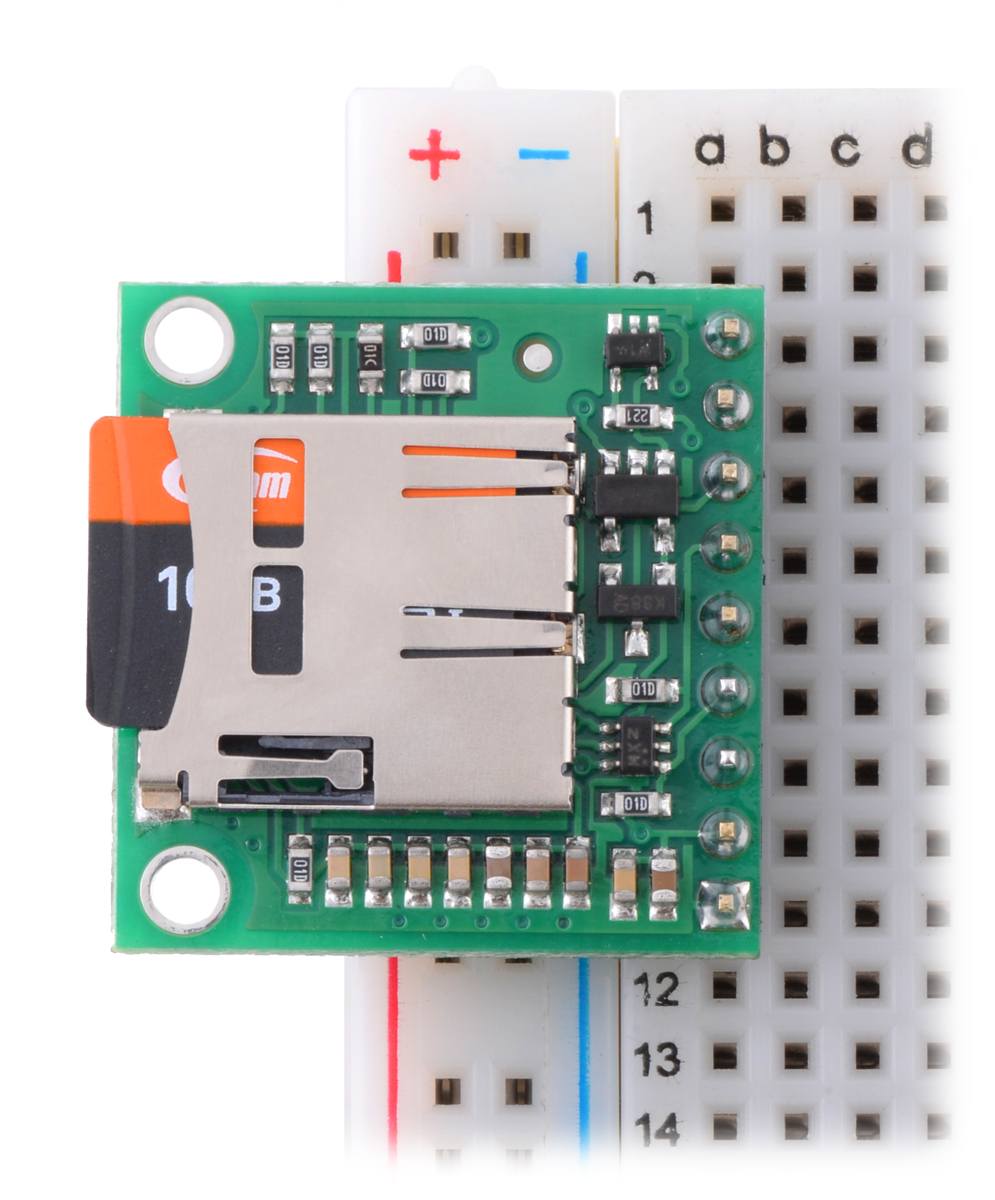
New product: Breakout Board for microSD Card with 3.3V Regulator and Level Shifters
 |
In September of last year, we started carrying our Breakout Board for microSD Card, which was the first board that I ever designed and routed here at Pololu. It is a simple breakout board that gives direct access to each contact available on a microSD card socket. However, since microSD cards operate at 3.3 V, it can be tricky interfacing them with a 5 V system. To address this, we made a new version with an integrated 3.3 V regulator and level shifters. Even with the extra components (and mounting holes, which the mechanical engineers at here Pololu are always pushing for), the board is still compact, measuring only 0.94″ × 0.9″, and it breaks out all of the contacts from a microSD card socket necessary to interface with the card through its SPI bus mode interface to a single 1×9 row of 0.1″-spaced pins. This allows easy use with breadboards, perfboards, or 0.1″ connectors.
 |
You might recognize the circuit from our A-Star 32U4 Prime controllers, which use essentially the same level shifters to interface a microSD card with an Arduino-compatible ATmeg32U4 microcontroller running at 5 V.
For more information about this breakout board, see its product page.
Related products




Brandon's line following robot: The Chariot

For the recent LVBots line following competition, my first instinct was to try to come up with some unique alternative design for a robot that would be competitive with the traditional differential drive robots. However, I knew the winning robot from the last LVBots line following competition (Mostly Red Racer) would be returning, and it had an impressive time to beat. I also remembered spending so much time designing and assembling the hardware for my last line following robot, that I ended up not having enough time to tune the PID coefficients and get the performance I was hoping for. After brainstorming a few ideas, I ended up deciding to keep it simple and make sure I had enough time to get a robot I was happy with, which I ultimately named “The Chariot” because of its shape. The Chariot ended up winning second place in the competition, which I was very happy with. Instead of focusing this blog post on how you can make your own version of The Chariot, I will try to explain my thought process throughout the design and build process, In other words, my hope is that after reading through this post, it will be clear why I chose the parts that I did. Continued…
New products: Stepper motors with lead screws, traveling nut, and mounting bracket for NEMA 23 stepper motors
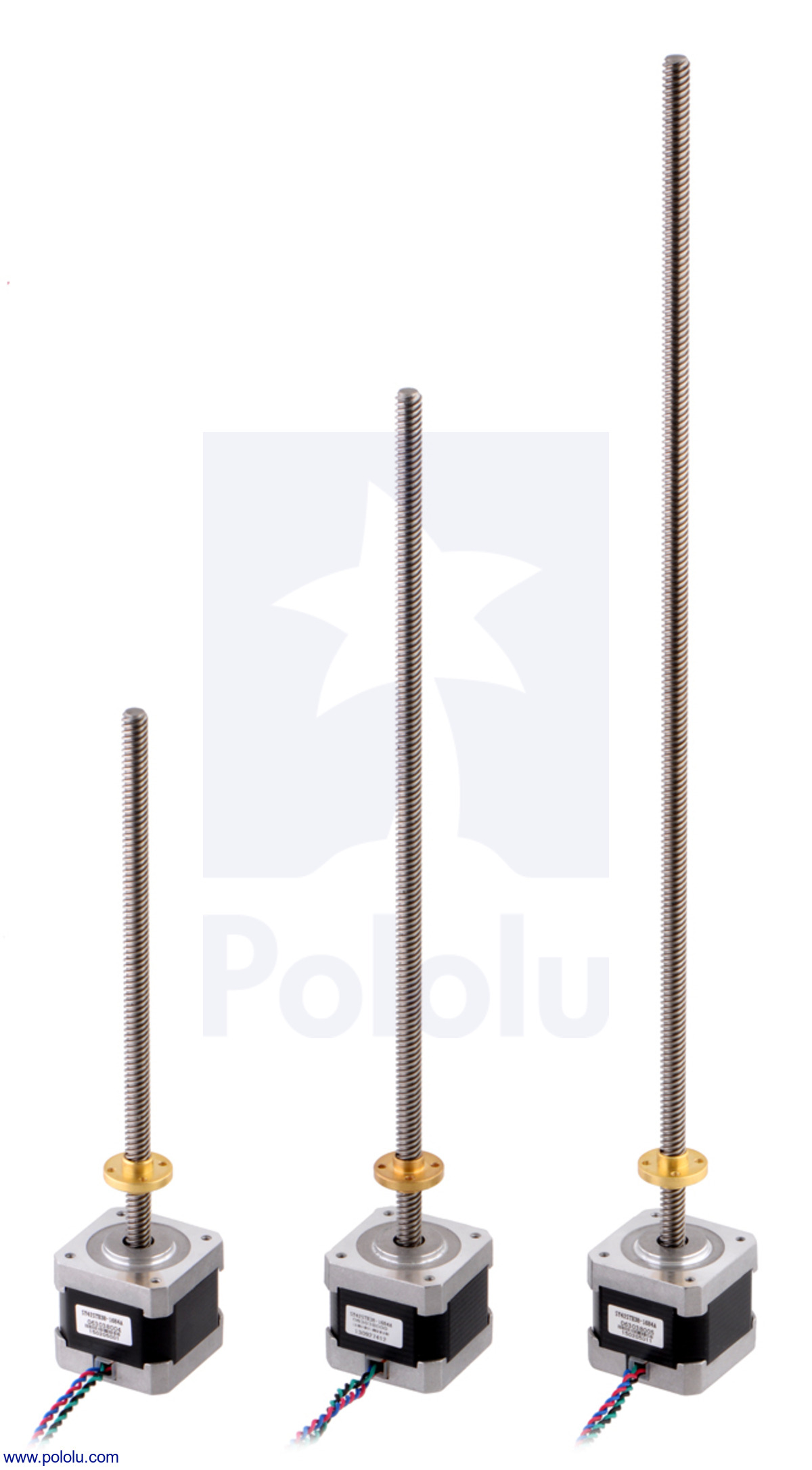 |
NEMA 17-size stepper motors with 18, 28, and 38cm lead screws. |
|---|
Since we started carrying the stepper motor with 28cm lead screw, we have routinely received requests for shorter and longer versions of it, so we are happy to announce that we are now carrying two additional versions: one with an 18 cm lead screw and one with a 38 cm lead screw. All three of the stepper motors with lead screw use the same NEMA 17-size stepper motor, which is also available without a lead screw.
|
|


All of the stepper motors with lead screw come with a traveling nut, also known as a carriage nut. This copper alloy nut features a mounting flange with four holes threaded for M3 screws to make it easy to integrate into your project. From time to time, we also get requests to make the traveling nut available for purchase separately, so we did! If you are interested in picking up some spare traveling nuts, more information can be found on the traveling nut’s product page.
|
|

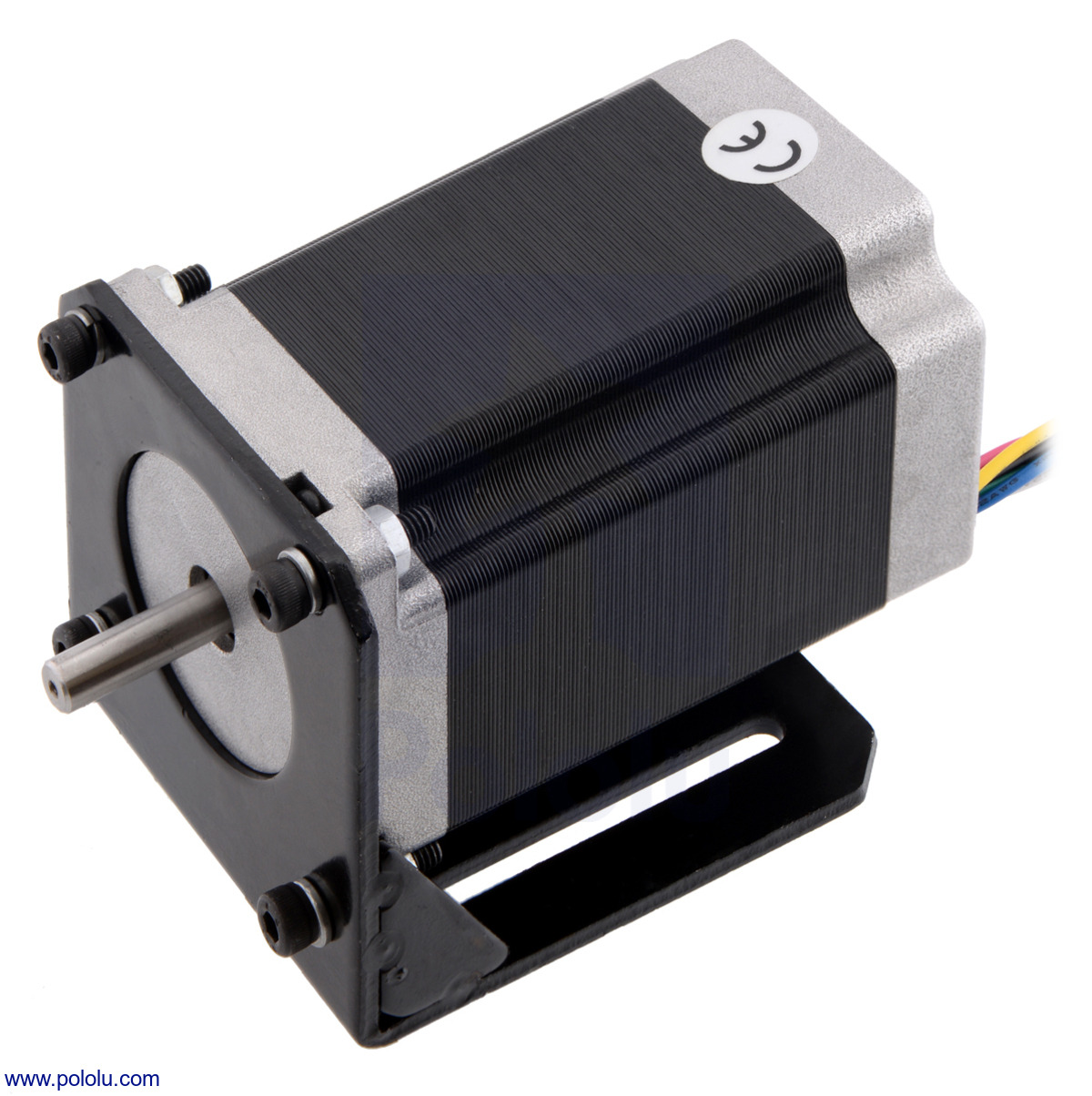
We also have a new NEMA 23 stepper motor bracket as pictured above. Around eight months ago, we started carrying our stamped aluminum mounting bracket for NEMA-17 size stepper motors, and since then, we added a stamped aluminum NEMA 14 stepper motor bracket to our selection. We looked into getting similar aluminum bracket for NEMA 23-size stepper motors but ultimately decided to go with a more rigid 3mm-thick steel mounting bracket for NEMA 23 stepper motors. On this bracket, two steel supports are welded in the corner along the bend of the bracket to provide extra reinforcement.
Related products




Automated ball path contraption for the holiday season
Bruno Schneider posted the above video on our forum that showcases an automated ball path machine he made for last year’s advent season with his brother and father. The contraption uses a 24-channel Mini Maestro and is displayed in the window of his mother’s sewing shop. The machine is fun and impressive by itself, but the video (with accompanying sound effects) makes the project even more entertaining.
If you make or have made any festive projects using the Maestro or any of our other products, we would love to see them! You can post them in the comments below or in the Share Your Projects section of our forum, which is also a great place to browse for inspiration or ideas for a new project.
Related products




ToyCollect: A robot that collects toys from hard-to-reach places
 |
The people at Seewald Solutions posted about their Raspberry Pi-based robot they call ToyCollect. Inspired by the creator’s daughter, who hides her toys under the couch, the robot is controlled via Android and can be driven under the couch to allow the user to view the hidden toys via a Raspberry Pi camera module and retrieve them. Along with a Raspberry Pi, the ToyCollect robot uses a Zumo Chassis Kit, 100:1 Micro Metal Gearmotors HP, Qik 2sv1 Dual Serial Motor Controller, and a Zumo blade to push the toys. The video below shows the robot in action (in German; subtitles available):
For more information, including the source code and instructions for building your own ToyCollect robot, see the ToyCollect post on the Seewald Solutions website.
Related products




New products: Brackets for mini plastic gearmotors
Our mini plastic gearmotors make great low-cost actuators for small robots, but they have one major shortcoming: they are not easy to mount (the offset versions have just one mounting hole and the 90° versions don’t have any). Well, today I am pleased to announce that we now have two mounting solutions!
|
|
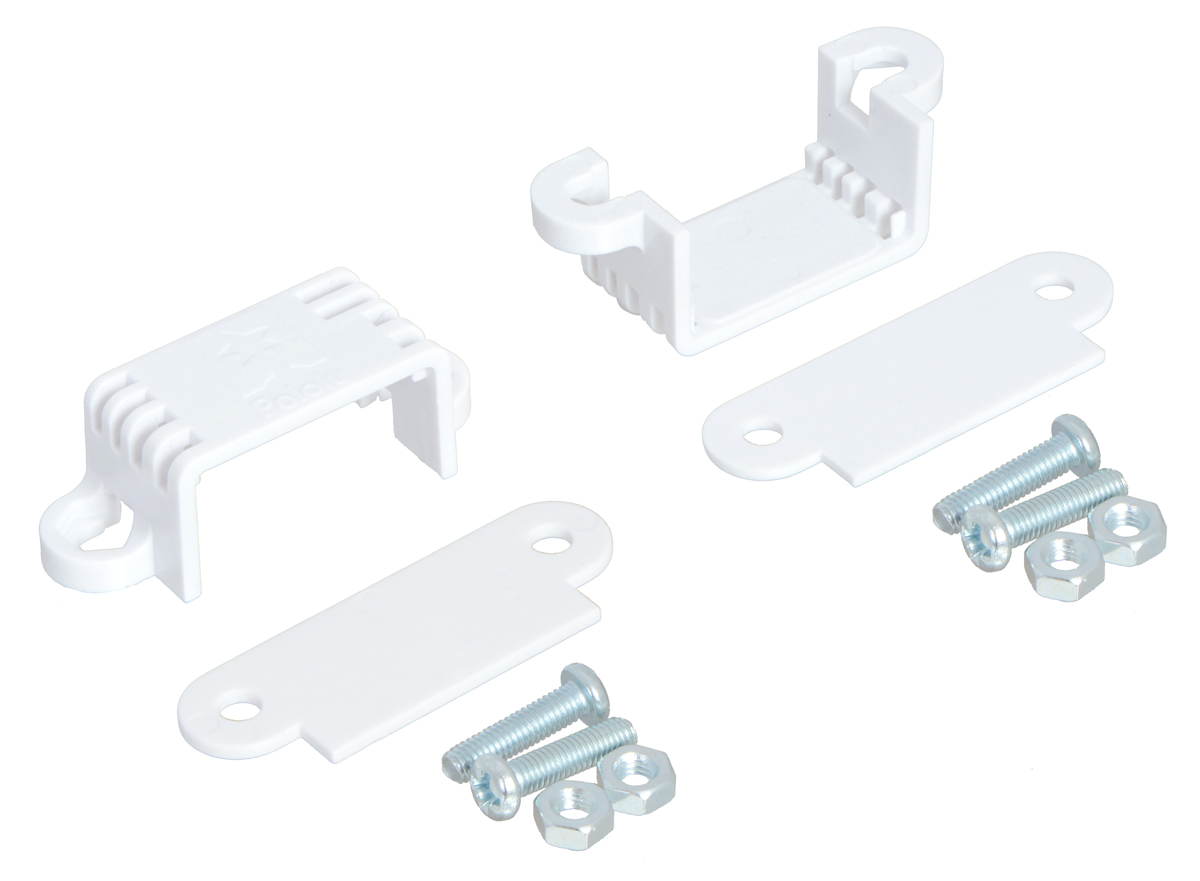
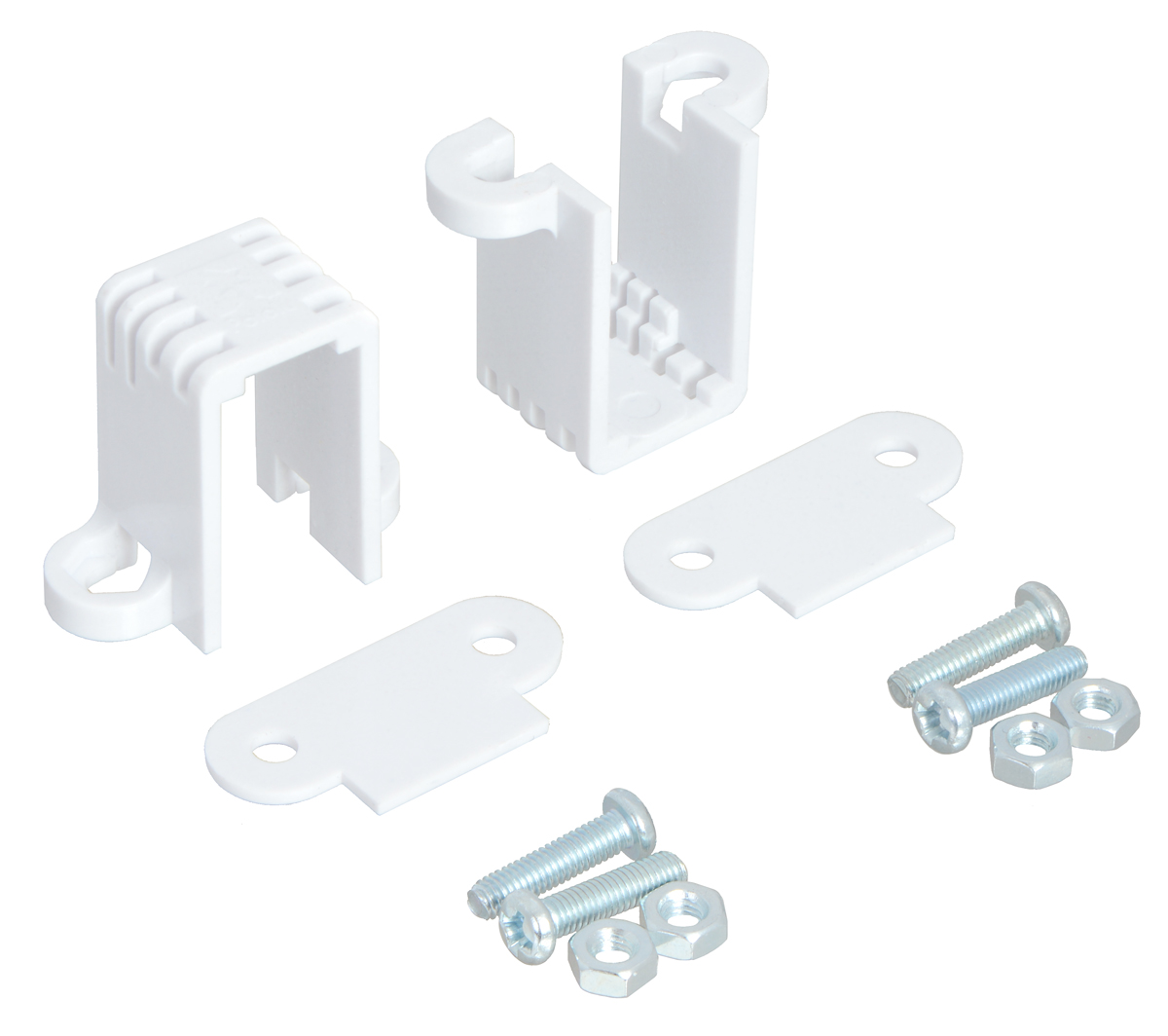
These new plastic brackets, available in a wide version and a tall version, are designed specifically for our mini plastic gearmotors, with internal ridges that fit into recessed features on the gearmotors to hold them securely in place. Both brackets are compatible with all of our mini plastic gearmotors, and the two versions allow for different mounting orientations, some of which can be seen in the pictures below:
|
|
|
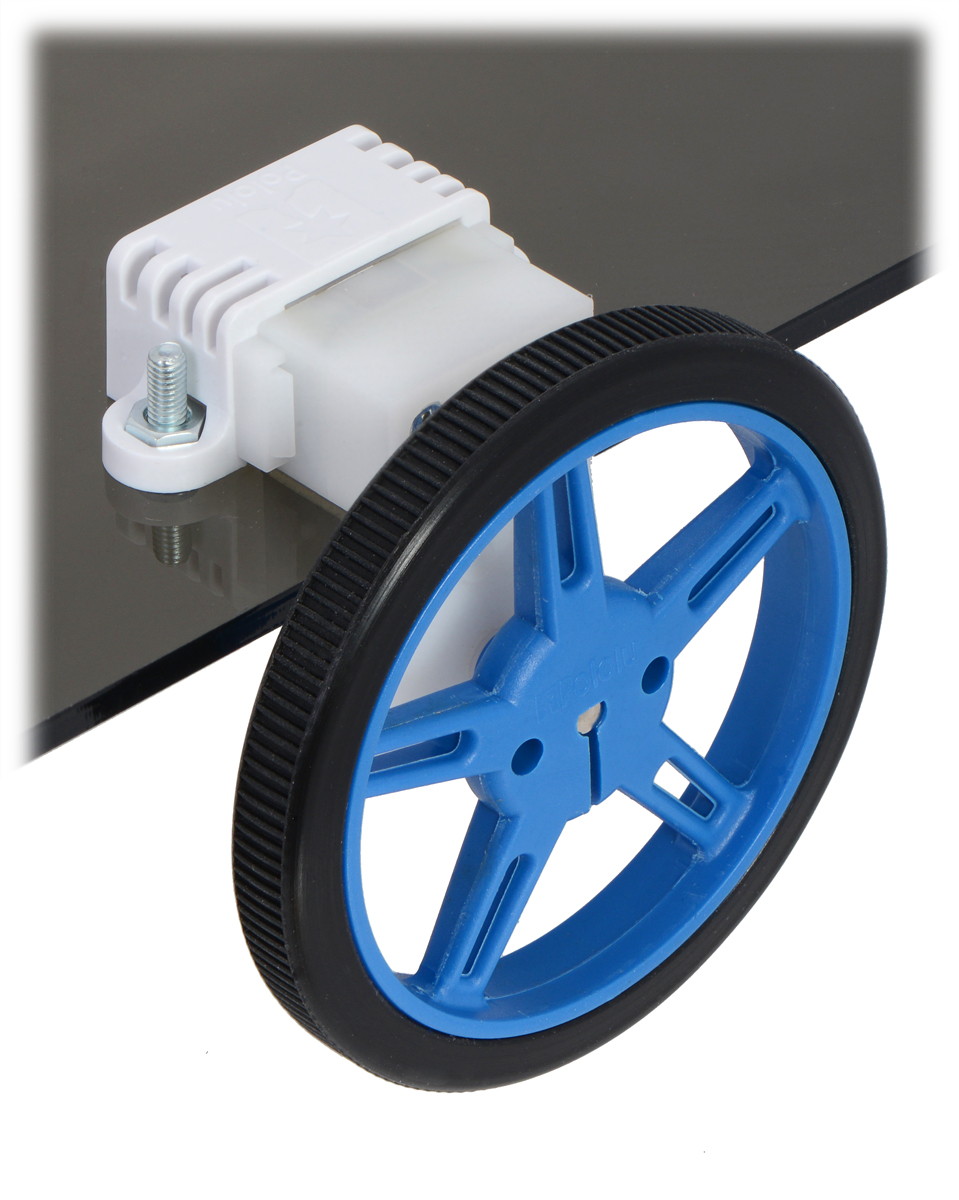
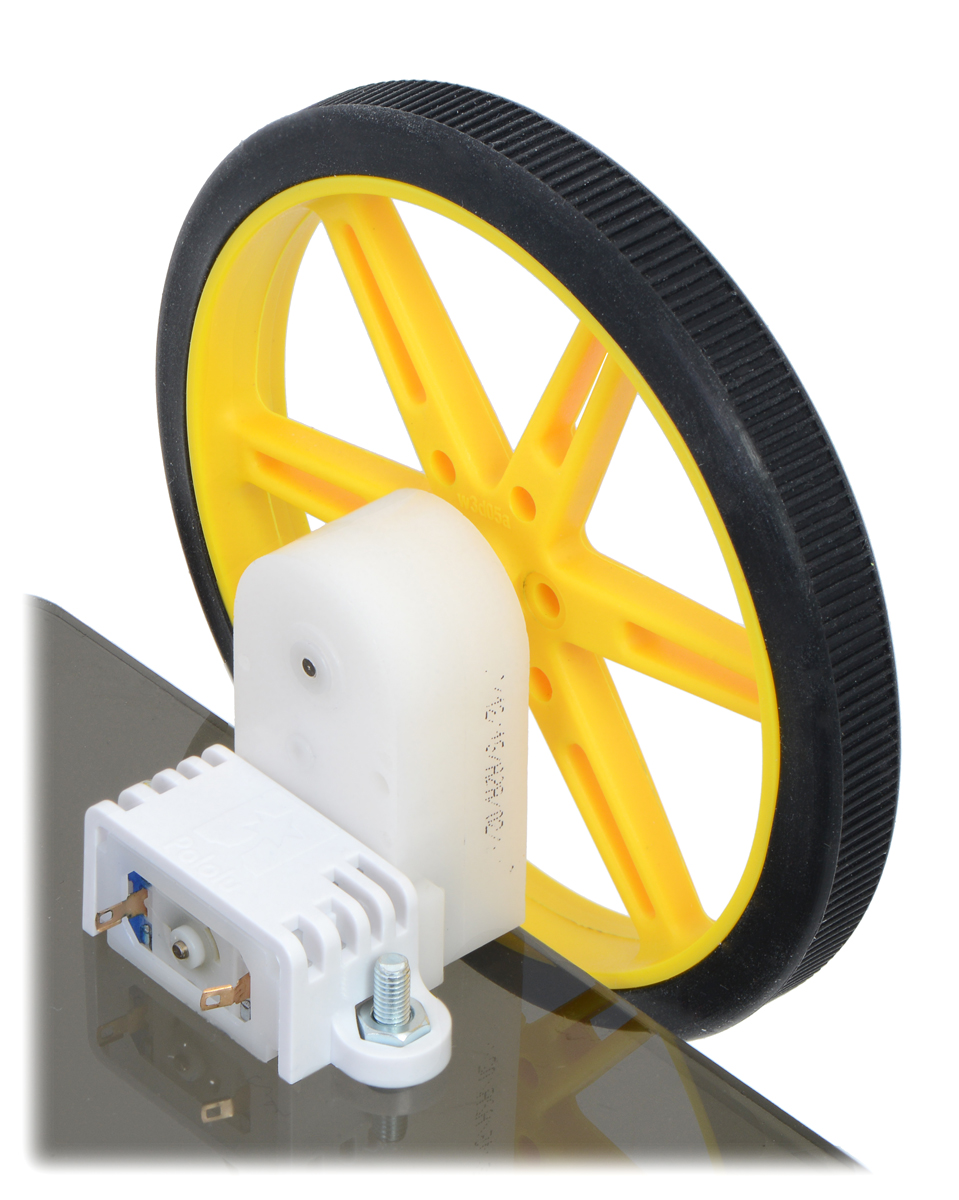
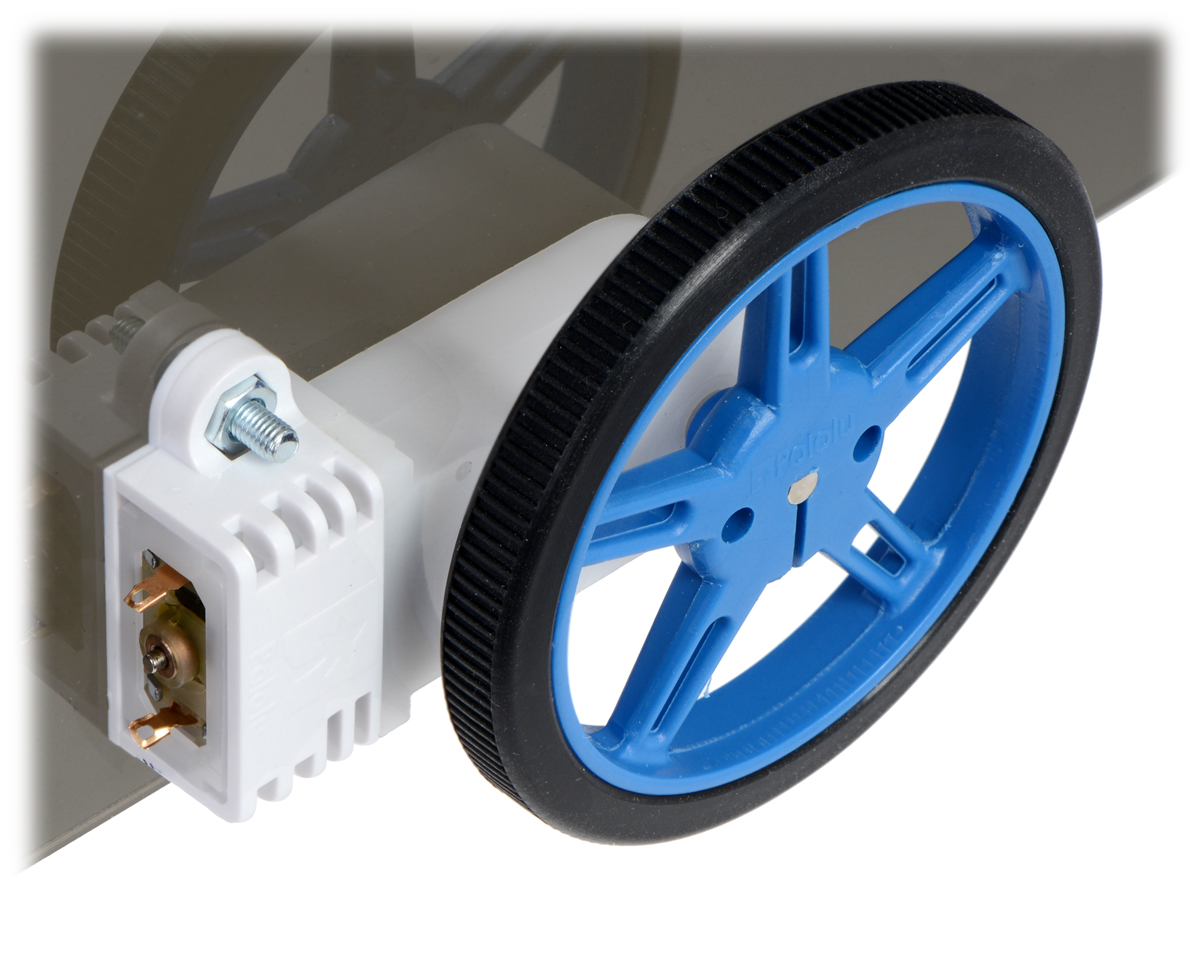
|
|

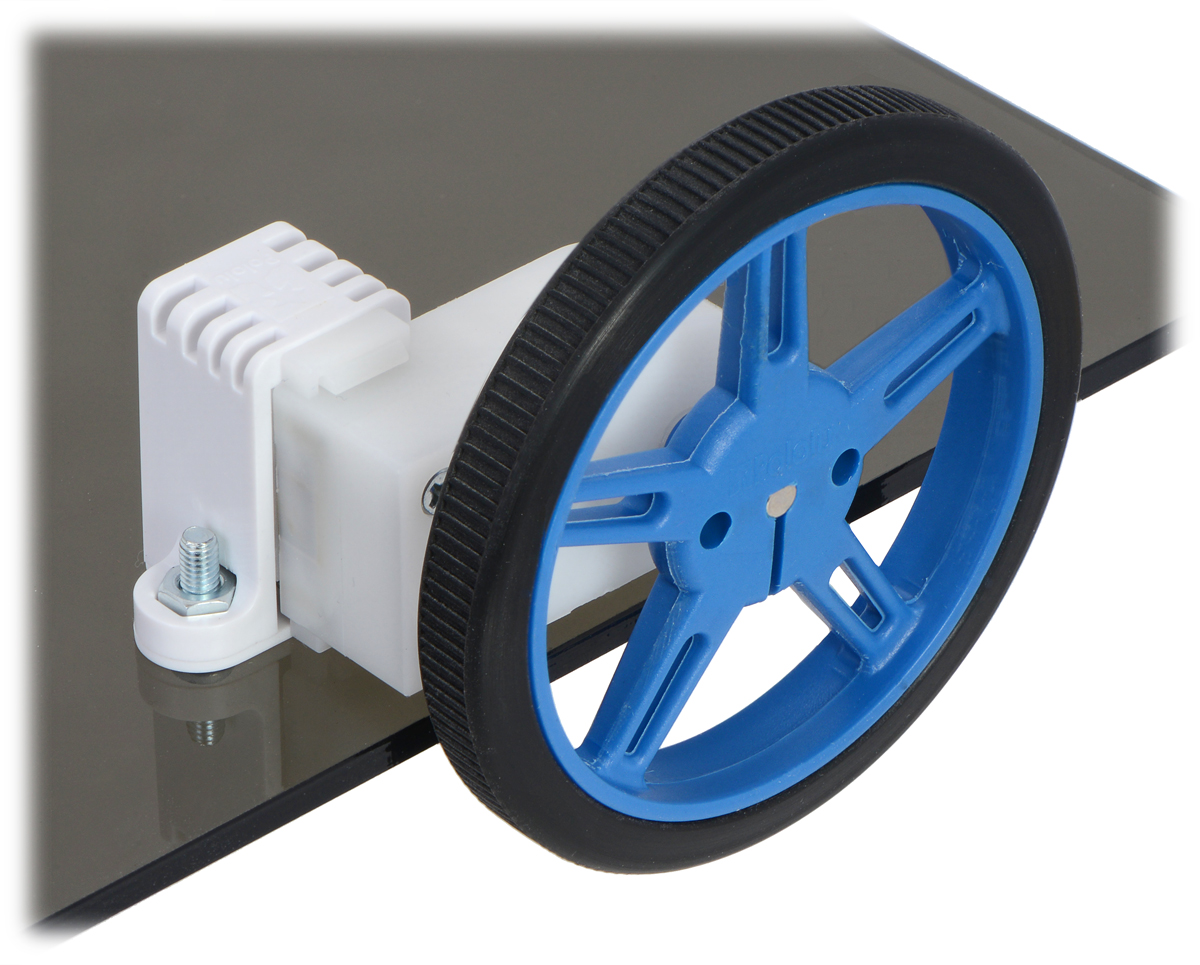
In some orientations, features of the mini plastic gearmotor cases prevent them from being flush with a flat mounting surface. To address this, we include a spacer plate with each bracket that fits between the gearmotor and the mounting surface in these orientations, keeping the motor level. If you look closely at the pictures above, you can see the spacer plate being used in three of them.
These new brackets are sold in pairs along with mounting hardware (two M3 screws and nuts per bracket).
See the product pages for additional information:
Related products


New products: Brackets for Sharp GP2Y0A02, GP2Y0A21, and GP2Y0A41 distance sensors
 |
Our new stamped aluminum L-brackets are specifically designed for Sharp’s popular analog GP2Y0A02, GP2Y0A21, and GP2Y0A41 distance sensors, making it easy to mount them to your project in a variety of ways. The brackets are made of 0.8mm-thick aluminum, so they are light and bendable by hand if your application calls for something other than their default 90° angle, yet they are rigid enough to hold their position while in use.
These new brackets are sold in pairs and are available in three different versions: compact perpendicular and parallel versions, and a slightly larger but more versatile multi-option version.
|
|
|
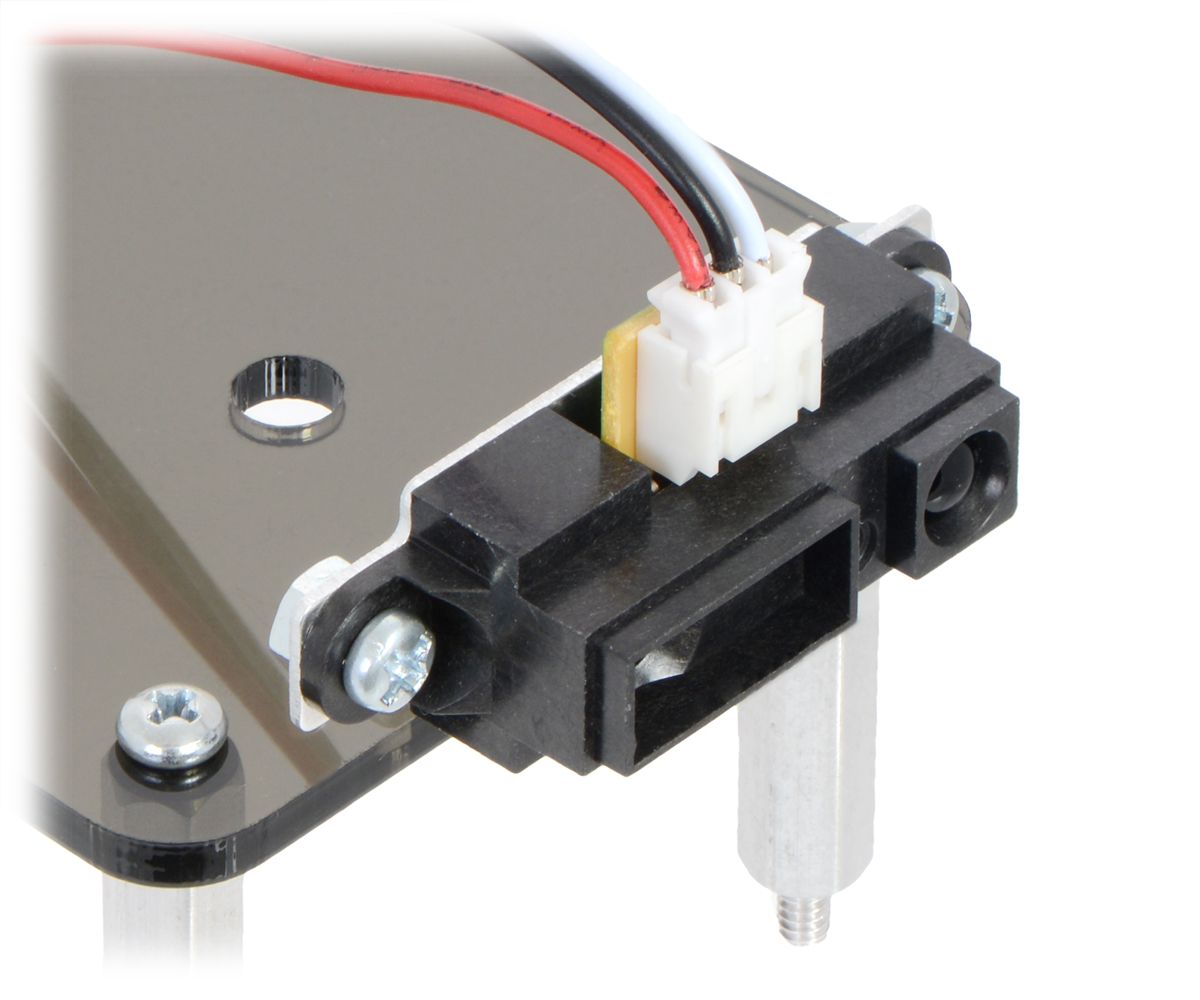

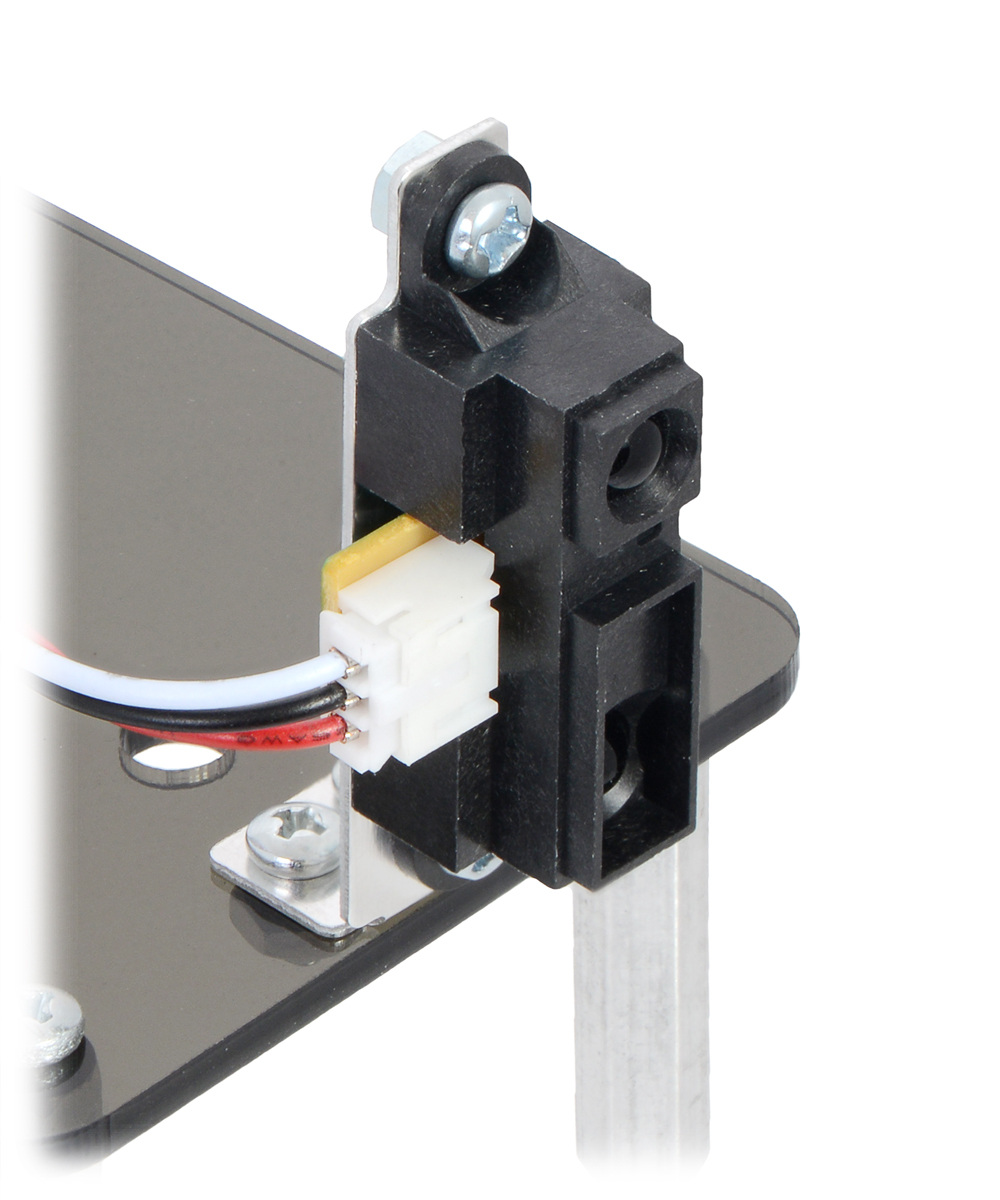
The appropriate bracket for your project depends on the specifics of how you would like to mount it. For example, if you want a low-profile installation on a horizontal surface, the parallel bracket (pictured above on the left) is a good choice. For a low-profile installation off of a vertical surface, the perpendicular bracket (pictured above on the right) might be most appropriate. The multi-option bracket (pictured above in the center) allows the sensor to be mounted to either face, so it supports both perpendicular and parallel orientations, and the long slots offer a lot of flexibility in sensor placement relative to the mounting surface.
See the product pages for additional information:
- Bracket Pair for Sharp GP2Y0A02, GP2Y0A21, and GP2Y0A41 Distance Sensors – Perpendicular
- Bracket Pair for Sharp GP2Y0A02, GP2Y0A21, and GP2Y0A41 Distance Sensors – Parallel
- Bracket Pair for Sharp GP2Y0A02, GP2Y0A21, and GP2Y0A41 Distance Sensors – Multi-Option
Related products








Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










