Pololu Blog » User Profile: Jan » Posts by Jan »
Posts by Jan (Page 7)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: Dual G2 High-Power Motor Drivers
 |
We sell a lot of motor drivers, which makes sense since you usually need motors to build robots, and motor drivers tend to be the kind of product you cannot really build yourself on a breadboard. One of our more popular products is the dual VNH5019 shield for the Arduino:
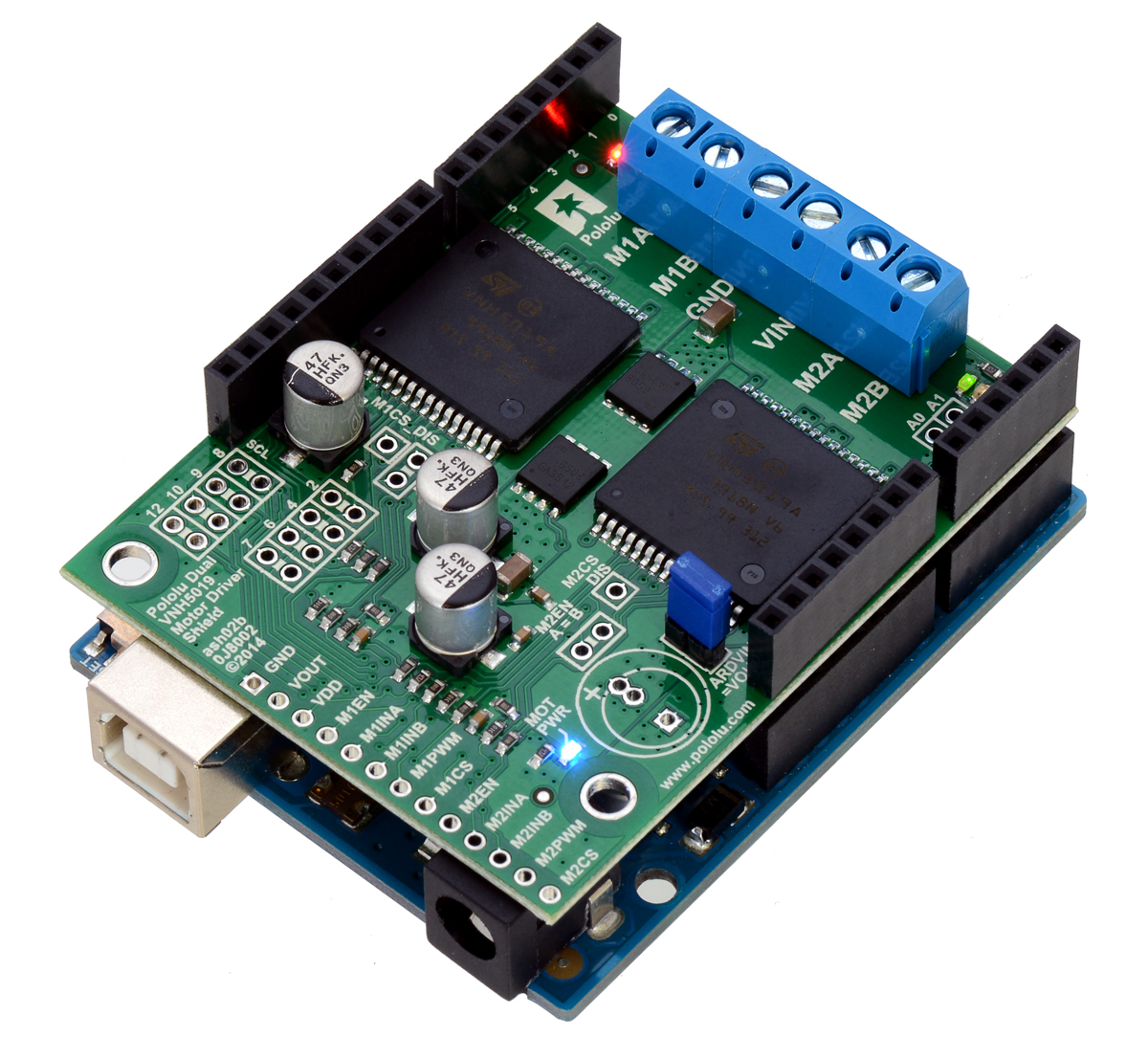 |
Pololu dual VNH5019 motor driver shield, assembled and connected to an Arduino Uno R3. |
|---|
That product is based on ST’s massive VNH5019 motor driver chip, which is a successor to the VNH3SP30 driver we initially started selling back in 2005:
 |
Older version of the High-Current Motor Driver Carrier. |
|---|
When I first heard of the chip (at one of the first LVBots meetings), it seemed like someone must have misremembered the spec since it was inconceivable for a single integrated chip to deliver 30 amps. And to some extent, that was valid—you would have to do a lot of extra thermal management work to get 30 A out of that chip without it overheating. But the chip really could do in excess of 10 A, which was still amazing; the real limitation was in voltage, especially if you tried to use PWM at any moderate frequency. The VNH2SP30 was better about PWM frequency, letting us get to 20 kHz, but it had an upper operating limit of 16 V. The VNH5019 raised this to 24 V, getting us tantalizingly close to the 24V rail many would like to use. The problem is that 24 V is the limit, and we really need to be able to operate higher than that to account for the usual variations in nominally 24V power setups.
As far as I know, there is no integrated circuit that can deliver over ten amps at 24 V nominal (i.e. at least 30 V max); for that kind of power, you need to go to H-bridges with discrete MOSFETs. We have had those as stand-alone products for a while, too. But those still leave you with a lot of wiring to do if you want to drive two motors, which is typically the minimum for a mobile robot. The new product family we just released makes that easy by providing two high-power motor drivers in one Arduino shield-type package:
|
|

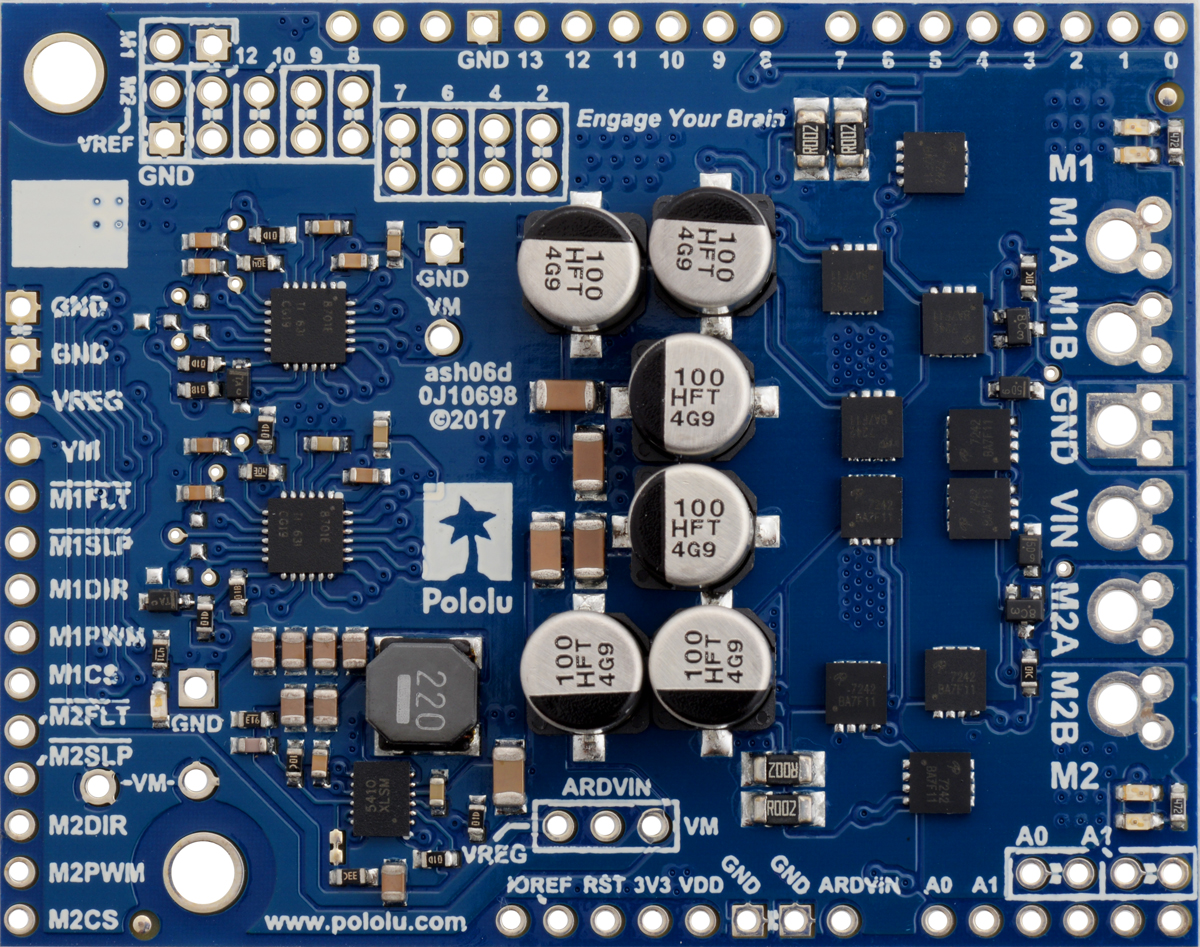
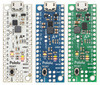
As you can see from the pictures, the main difference in these Dual G2 High-Power Motor Driver Shields is in the MOSFETs: the white boards have larger, 5×6mm MOSFETs, and the blue boards have smaller, 3×3mm MOSFETs. These correspond to the two versions of the individual drivers:
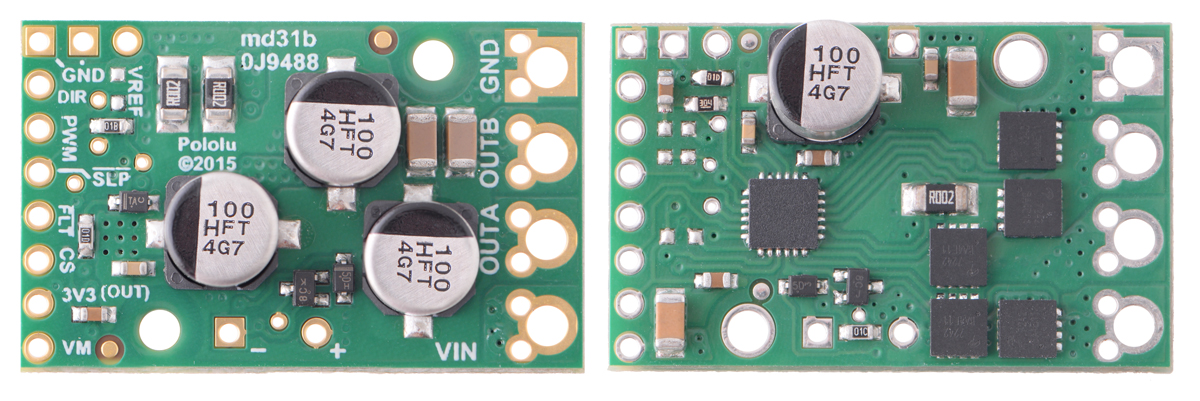 |
Pololu G2 High-Power Motor Drivers |
|---|
(The higher-power version on the left has the MOSFETs on the back side of the board.) We also offer each board with 30V and 40V MOSFETs, for four total options. The new dual motor drivers perform similarly to our single-channel G2 units, and like the single channel carriers, all of these dual drivers feature current sensing and an adjustable current limit that could be used to detect and protect against stall conditions. These are the individual performance points:
 Dual G2 High- Power Motor Driver 18v22 Shield |
 Dual G2 High- Power Motor Driver 18v18 Shield |
 Dual G2 High- Power Motor Driver 24v18 Shield |
 Dual G2 High- Power Motor Driver 24v14 Shield |
|
|---|---|---|---|---|
| Absolute max input voltage: |
30 V | 40 V | ||
| Max nominal battery voltage: |
18 V | 28 V | ||
| Max continuous current per channel: |
22 A | 18 A | 18 A | 14 A |
| Default active current- limiting threshold: |
60 A | 50 A | 40 A | |
| Current sense output: |
10 mV/A | 20 mV/A | ||
For drivers like these, power (heat) dissipation is generally the limiting factor. The copper area around the MOSFETs on both the white and blue versions of the drivers are about the same, so the lower-current blue units perform better then their smaller single channel G2 counter-parts, while the higher current white drivers do worse than the smaller single channel G2 carriers (which also use four layer PCBs for better performance). The power ratings we provide are the maximums without additional heat sinking or air flow and at room temperature. Please note that the boards will be extremely hot at those maximum currents, and the available current will be lower if the ambient temperature is higher.
Since many Arduino boards do not support higher input voltages, the new dual drivers also incorporate a 1A switching regulator so that a single higher-voltage supply can power the motors and Arduino. We have an Arduino library to help you get up and running quickly. And for those who want to use the board without an Arduino, all of the motor control connections are also brought out to a row of 0.1″ headers on one side of the board.
(And for those of you wanting to use this kind of driver with a Raspberry Pi, we have a Raspberry Pi HAT form-factor version coming soon!)
Related products




Free shipping, phase two: lots more free shipping
 |
We are now offering free US shipping for $60 or more of Pololu-branded products with active statuses. |
|---|
Since my post on Thursday afternoon, we have brought free shipping to dozens of products and free add-on shipping to hundreds more. Unfortunately, that still does not get you really free shipping for most of our thousands of products because many of them are individually too low-cost to make part-by-part free shipping feasible. We just do not have a way to ship you a $6 regulator or an $8 pair of wheels for free without having to inflate the price of the products. But today, we released phase two of our free shipping initiative, which allows us to offer free shipping in the US on orders of $60 or more of Pololu-branded products that have an active status. This should bring free shipping to most of our typical orders, which might include that set of wheels, a few motors, a motor driver, and maybe the $6 regulator.
You might be wondering what I meant by that somewhat awkward phrase, “Pololu-branded products that have an active status”. That’s actually related to yet another exciting new set of features we are bringing to the Pololu site. We are proud that we design and manufacture most of our products, and we want to make it easy to tell which items are made by us. For products from other brands, especially where we are authorized distributors or otherwise working with those brands, we want to make it clear that you are getting the product from that brand, and not some counterfeit or knock off. And sometimes we all just want something generic, like the ubiquitous 0.1" headers, where the manufacturer or brand does not really matter. In some of those cases, we might not want to reveal our suppliers, or we might want to have the flexibility to change suppliers without updating product specifications; explicitly calling out a product as generic should help make it clear what kind of a product you are getting.
Because many of our customers build their own products using our products as components, or design curricula around our products, I also want to better communicate the life cycle status of our products. We therefore added a “product status” field to our product listings so that you can quickly tell if a product is one that we expect to keep making for a long time or if we expect to be discontinuing it soon. I will go over the various product status designations in a separate blog post, but for the purposes of this free shipping announcement, the point is that the products we make and which are in our good graces will be considered toward the $60 free shipping minimum.
 |
We will be updating the product brand and status fields for our products in the coming weeks; please let us know if a product you are interested in is not updated yet.
Rolling out free shipping at Pololu
 |
Everyone wants free shipping, right? Well, today I am happy to announce an important step in bringing free shipping to Pololu, at least for our US customers. We are beginning to offer free shipping in these two senses:
Free shipping within the United States
 |
Some items are eligible for free shipping within the United States. If your shopping cart consists only of items eligible for free shipping, you will be presented with a “Free Shipping” shipping option during checkout. Free shipping will be shipped by a carrier and service we select, which will typically be the lowest-cost, slowest service. Currently, that would likely be First-Class Mail through the US Post Office or a ground service by FedEx, depending on the contents of the order.
Free add-on shipping within the United States
 |
Some items are eligible for free add-on shipping for orders within the United States. These are typically very light items that should not significantly impact our shipping cost, and we pass on those savings to you. No additional shipping will be charged for these items, independent of your shipping method. Orders that consist only of free add-on shipping items will cost the minimum shipping cost for each service as the item sizes and weights will not be added to the shipping cost calculation. Orders with at least one free shipping item and the rest free add-on shipping items will have a free shipping option.
Because items with free add-on shipping will not be considered in the calculation, it is possible for the shipping method you select to be invalid because the package exceeds the limit for that method. In such cases, we will substitute a similar shipping method. For example, if you pay for First-Class Mail as your shipping method but your order actually ends up weighing more than the limit for First Class Mail, we would ship by Priority Mail.
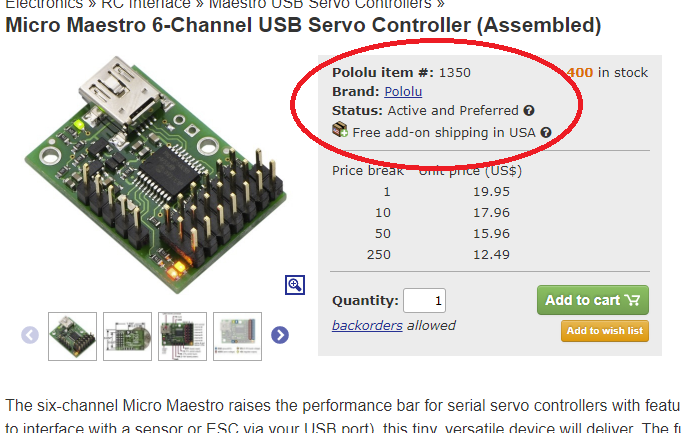
By controlling these two aspects of free shipping on an individual product level, we can really offer free shipping, without raising prices. We are rolling this feature out with a few items we would like to promote:
Products initially eligible for free shipping and free add-on shipping:
|
Pololu Dual VNH5019 Motor Driver Shield for Arduino |
|
|
Tic T825 USB Multi-Interface Stepper Motor Controller (Connectors Soldered) |
|
|
Tic T825 USB Multi-Interface Stepper Motor Controller |



Products initially eligible for free shipping only:
|
Zumo 32U4 Robot (Assembled with 50:1 HP Motors)Zumo 32U4 Robot (Assembled with 75:1 HP Motors)Zumo 32U4 Robot (Assembled with 100:1 HP Motors) |

Products initially eligible for free add-on shipping only:



As we work on our system and monitor the results with these initial products, my goal is to make free shipping, or at least incrementally free shipping, available for more and more of our products. We still do not have a solution for those of you who write us angry emails about the ridiculousness of our charging $3.95 to ship a $2 part (and yes, I am aware of 39-cent listings with free shipping on AliExpress; for now, we cannot compete with them on price alone). But rest assured that since shipping is one of our biggest expenses, we will continue to work hard on keeping that cost as low as we can.
If you see a product that you feel should qualify for free shipping or free add-on shipping but does not, please contact us, and we can evaluate the product’s eligibility. I would also like to hear what you think of this approach and whether you expect it will be helpful to you.
Update (31 October 2017): We are now offering lots more free shipping.
Packaging changes for better electrostatic discharge protection
Most of the products we manufacture are small electronics subassemblies, which we have been packaging in these pink antistatic bags that are probably familiar to everyone who has worked with electronics:
 |
These bags are supposed to help prevent charge buildup and therefore help prevent the sensitive components inside from getting damaged just from the bags being shuffled around. But, if you charge yourself up and then grab the bag, you can still zap the electronics inside through the bag.
This year, we began transitioning our packaging to metalized shielding bags, like this:
 |
These bags have the charge buildup prevention of the pink bags but also have a metal layer that prevent the spark from getting from your finger to the electronics parts in the bag. Most bags I have seen have some plastic coating outside the metal layer so that you don’t have zero resistance along the surface of the bag, but I have heard of people shorting things out by powering them up while sitting on some types of metallic bags.
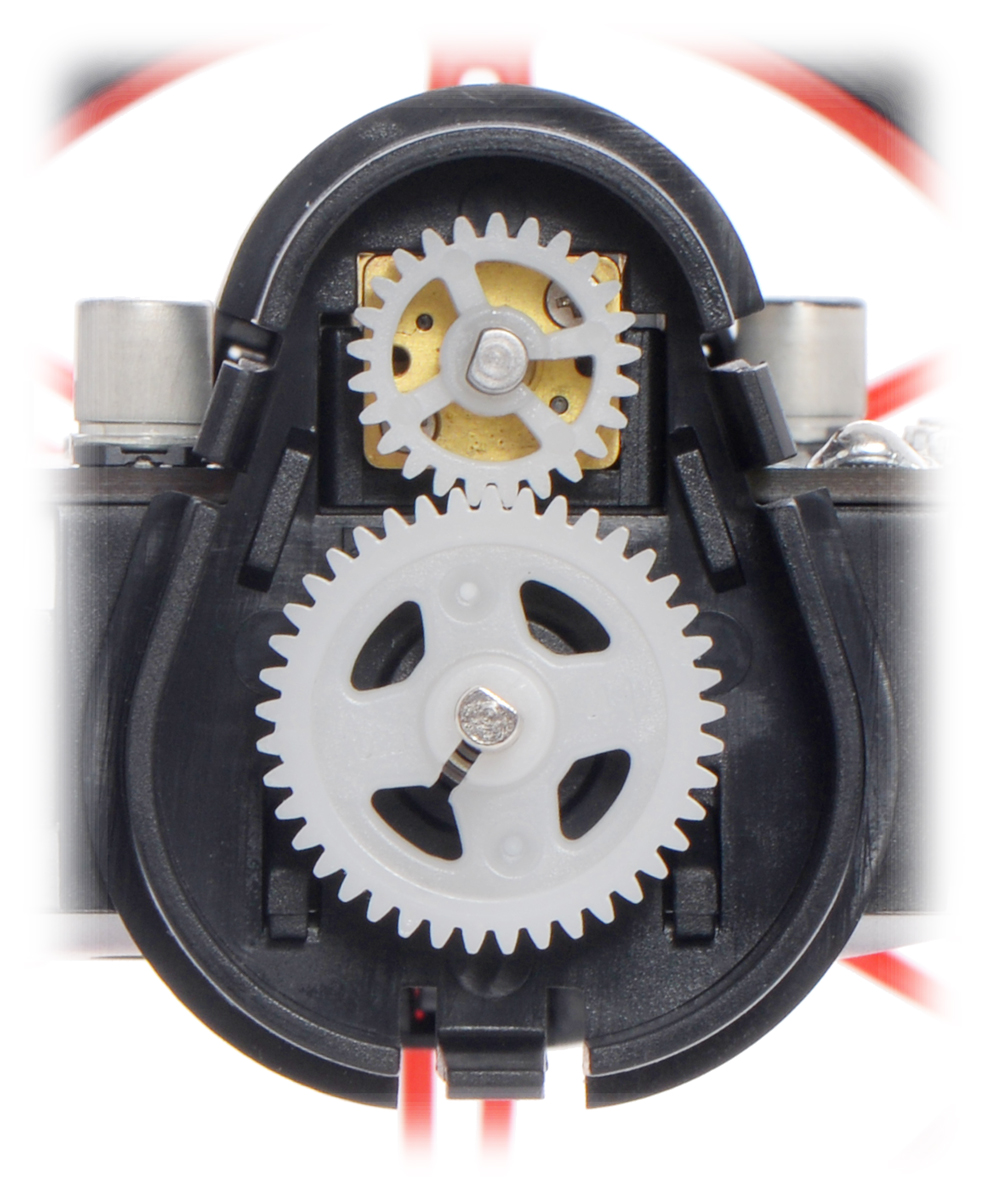
 |
Did a static discharge into a USB port cause this power supply to go up in smoke? |
|---|
I once got a huge static shock when I plugged a flash drive into my USB port, and right after that, a bunch of sparks and smoke came out of my computer’s power supply. I’m pretty sure that wasn’t a coincidence, but I still can’t be sure it was a case of electrostatic discharge (ESD) destroying my computer. And usually, ESD damage is much more subtle and basically impossible for us to confirm. So, changing the packaging is one of those things where it will be very difficult to tell if it’s really doing anything. But we go through a lot of effort to inspect and test each item we make so that we can be confident it worked when we made it, so this packaging change should give us still more confidence that the part is in good condition when you receive it. It will take a while before all of our products get changed over, so don’t be shocked if your order arrives with a mix of packaging types.
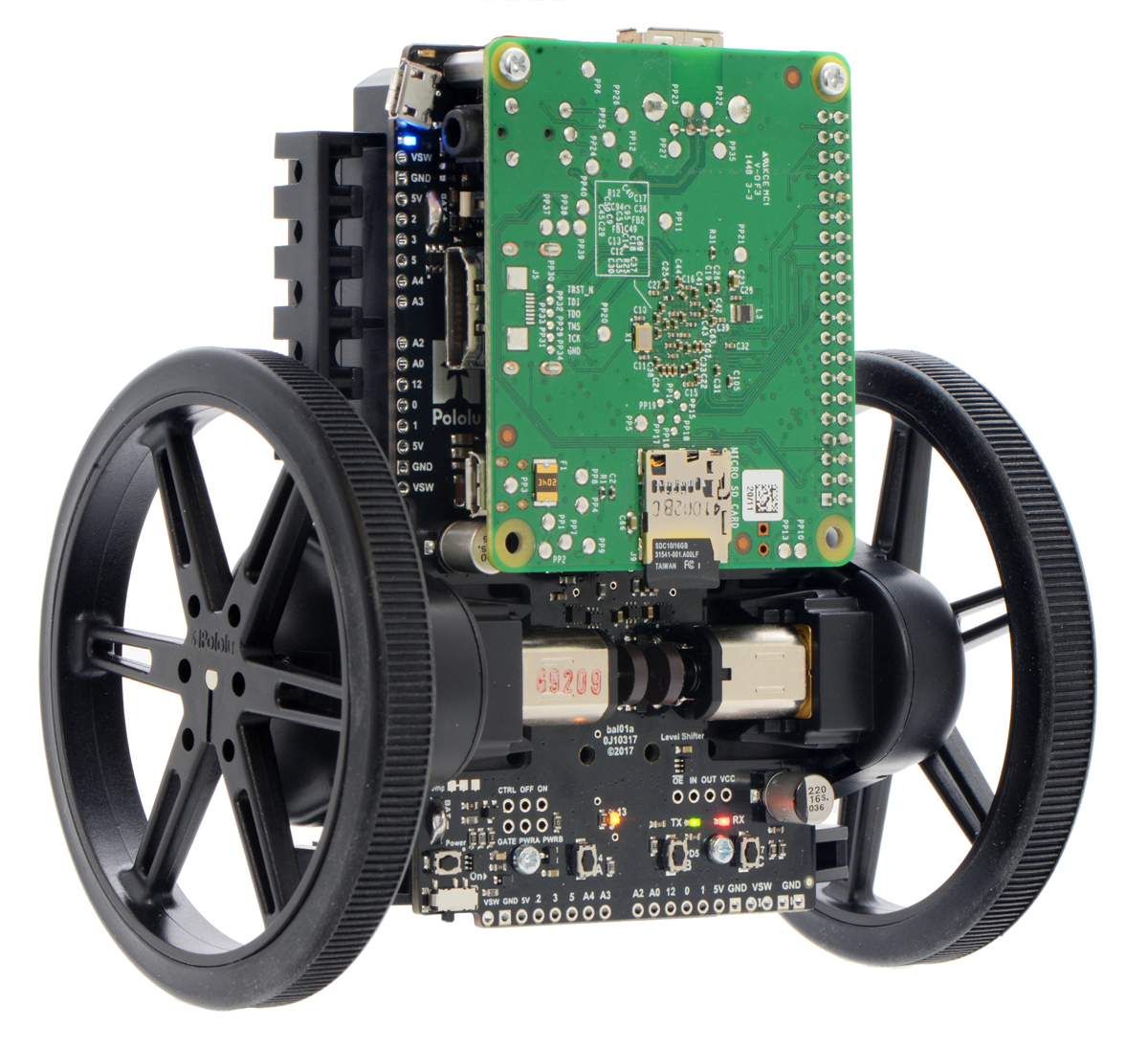
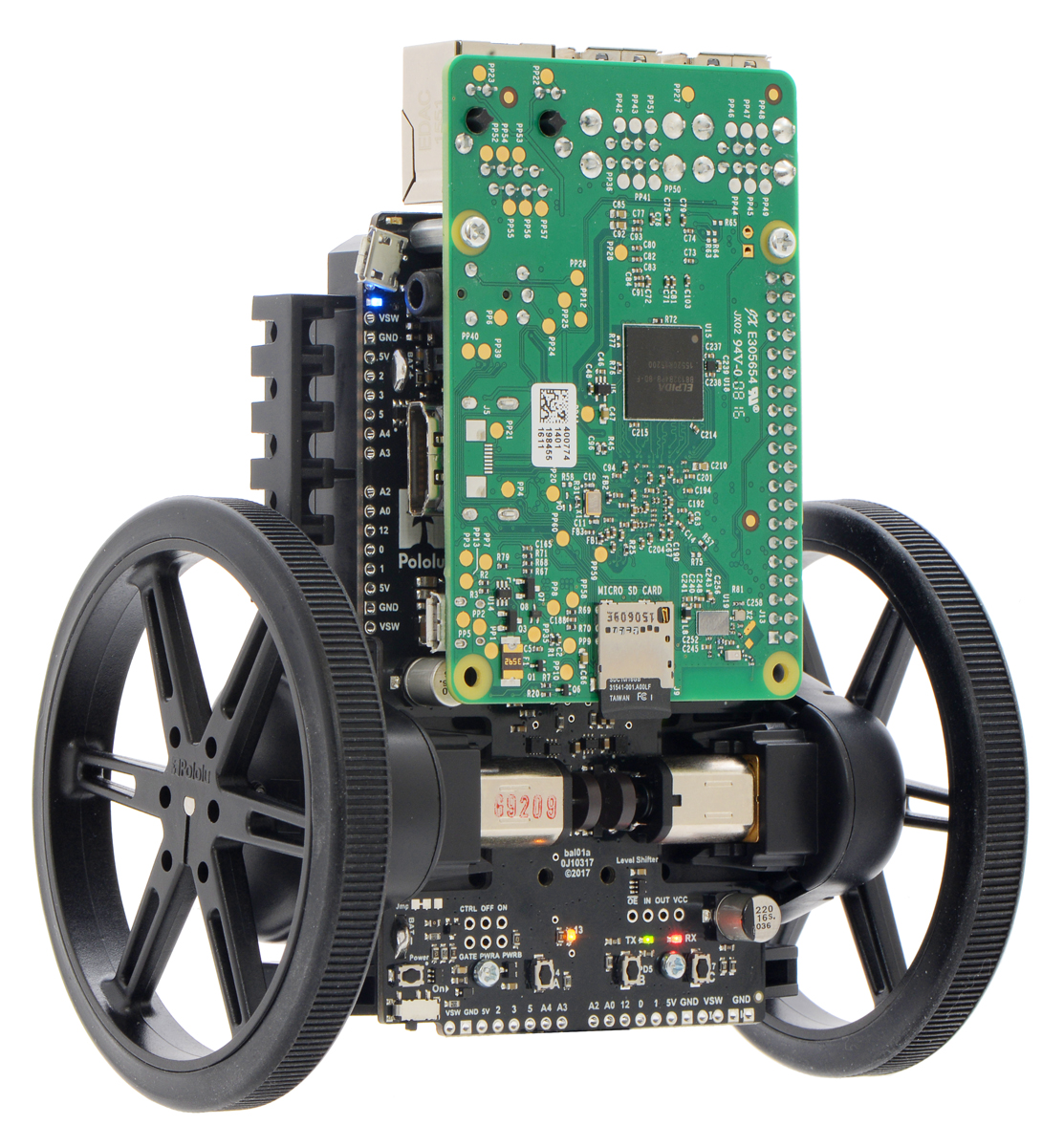
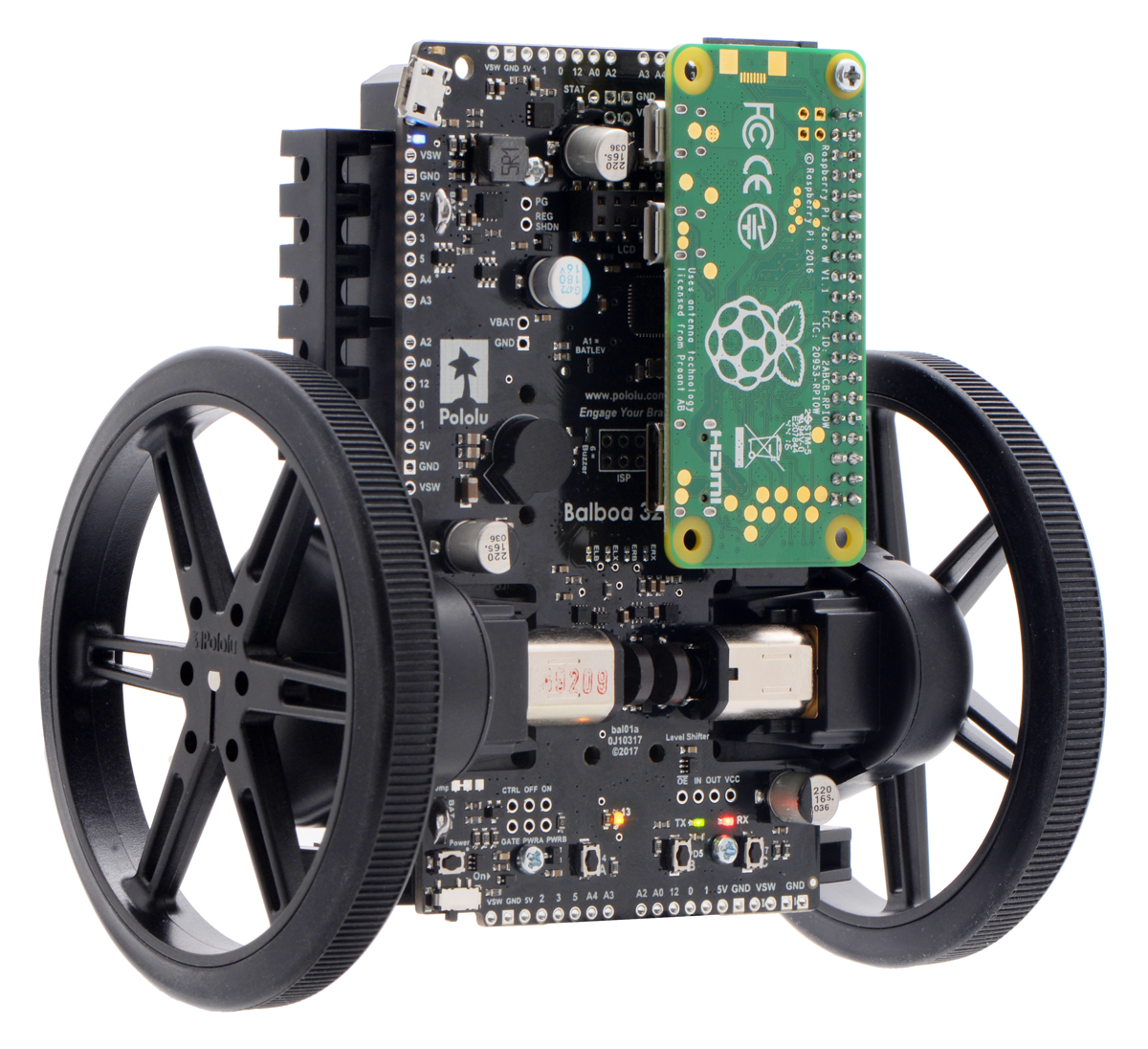
Balboa is here!
 |
I am excited to announce the release of the Balboa robot! The Balboa is a two-wheeled balancing robot platform that is small enough to tempt you to run it on a desktop, but it’s quick enough that you should probably stick to bigger, softer surfaces. Or at least put a safety net or foam pit around your desk. Here is a short video showing it kicking up into balancing position and driving around:
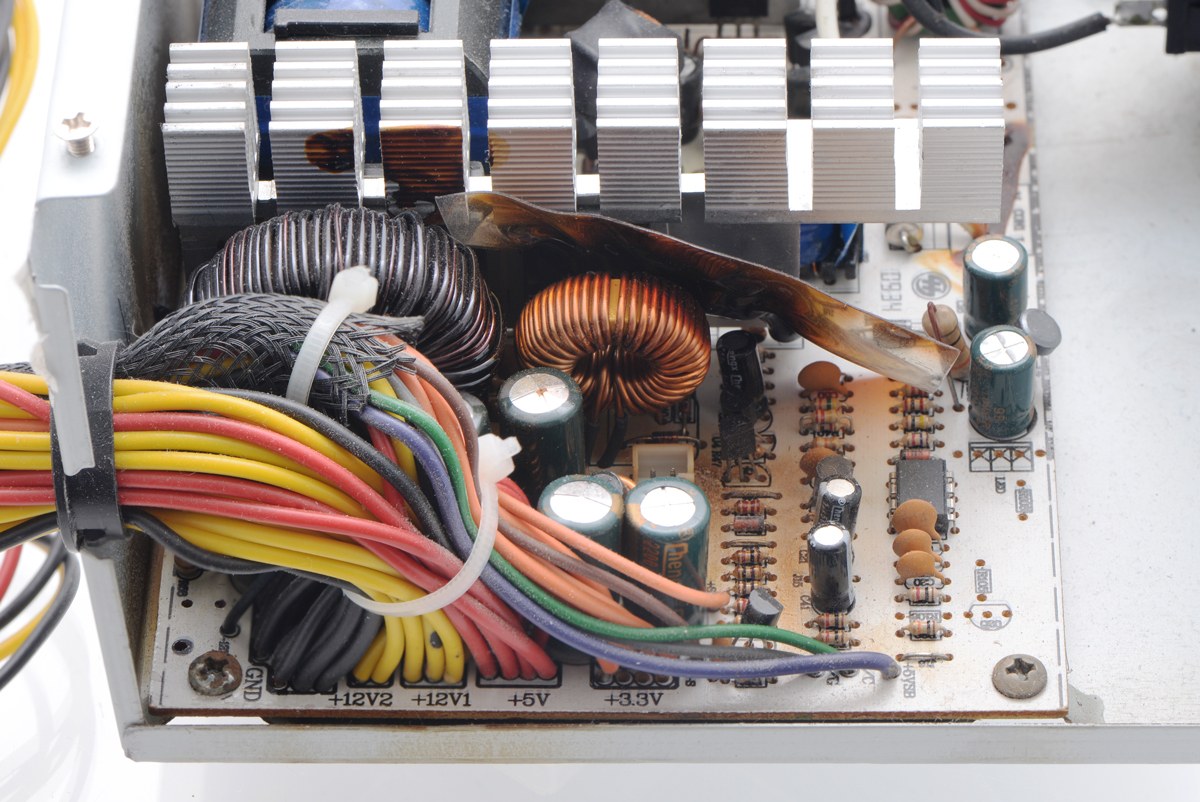
 |
A look inside the external gearbox on the Balboa 32U4 Balancing Robot. |
|---|
One of our main goals in designing our robots is to make them complete and engaging on their own while making them open and expandable enough for all kinds of projects. We also don’t want them all to be the same. Most of the Balboa robots in our pictures have 80 mm wheels, but the chassis can also work with our 90 mm wheels (and to a lesser, barely practical extent, our 70 mm wheels). Because the chassis is made for our micro metal gearmotors, you have a few options for gear ratios as with our Zumo sumo robots, but what’s really exciting about the Balboa design is that there is an extra stage of gear reduction for which you get five different options (all included, and you can easily change the gear ratio from whatever you initially choose). The design also allows the drive wheels to be supported on ball bearings, reducing the stress on the micro metal gearmotor output shafts.
The Balboa chassis has a built-in battery holder for six AA cells, which typically give you several hours of run time, even if you add some extra power-hungry electronics like a Raspberry Pi.
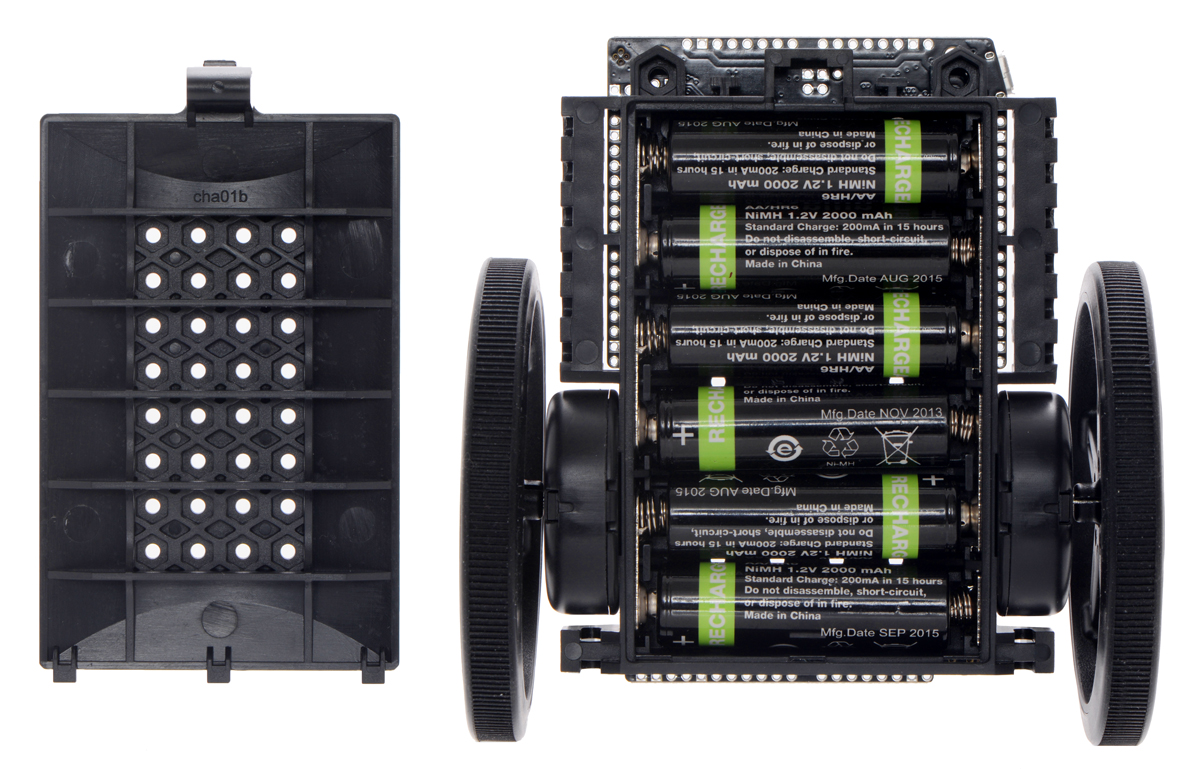 |
Balboa 32U4 Balancing Robot with battery cover removed. |
|---|
The main microcontroller is an Arduino-compatible ATmega32U4, which is powerful enough to read the on-board IMU sensors and encoders and to control the motors to balance the robot; it’s also great for introductory projects like line following or reading an RC receiver to make a radio-control balancing robot. For advanced projects, the Balboa is ready for you to add a Raspberry Pi computer to perform high-level algorithms while the ATmega32U4 microcontroller takes care of low-level tasks like motor control.
|
|
|
We will be adding more content to the Balboa’s product page and user’s guide, and we will have more blog posts about the Balboa robot. For today, we’ll end with some slow-motion footage of Balboa popping up on its own and then recovering when Paul knocks it around a bit:
Related products

Rainbow baby Eve

It’s been more than two years since my last post. I thought I would post an update a year ago, when Eve was born, but that didn’t go very well, and the uncertainty about how things would turn out with her made it difficult to rally around her birth as some celebratory point from which to start moving on. I feel at once as if I have lost two years of my life, making no progress, and yet that my life has completely transformed in that time. But I know things have gotten better because I am usually free of the sadness and fear that still filled me a year ago, around Dez’s first birthday. Continued…
On losing my baby

This blog post is about some personal difficulty I’m going through: last month, my baby died unexpectedly a day or two before he was born. I could just collect my thoughts in my private journal, but I am sharing my experience here on the Pololu blog because most of the people I interact with and care about are related to Pololu, be they friends, employees, vendors, or customers. Just about everyone at Pololu knew of my eager anticipation of this new baby, and any visitors were aware that I might miss our meetings with short notice depending on when the baby arrived. Continued…
New products: Magnetic quadrature encoders for micro metal gearmotors

Everyone wants encoders on their motors. If you think you don’t, you just don’t know it yet. I think the main reason is that we really just want motors to do what we tell them to do, but they don’t. One of the most common beginner questions we get is some variation of, “why doesn’t my robot go straight?” or “I got two of the same motor but they do not go the same speed; is something wrong with one of them?” More seasoned robot builders know that since there will always be variations in everything that contributes to a motor’s performance, our best hope is to put a sensor on the motor to monitor what is actually happening and then adjust the motor control to make reality better match our desires. Continued…
Big price reductions and new options for our popular stepper motor drivers

We recently substantially reduced prices on our stepper motor driver carriers, and I figured this announcement was a good time to give you an update on our perspective and capabilities.
It has been over five years since I designed our original stepper motor driver carrier, which was for the A4983 from Allegro. While fairly straightforward, the implementation reflected several design philosophies that go into Pololu products, such as making the boards as small as practical and including the right extra components to make the main chip easily usable without unnecessarily limiting its features. Continued…
Thoughts on journalists checking drafts with sources
I received a phone call yesterday from a writer for a local community-oriented, general-interest publication. Pololu is one of a dozen or so companies she was covering in an article about technology-related companies in southern Nevada, and she asked some basic questions about Pololu and how we might be relevant to Las Vegas-area locals. She then asked if there was anything else I would like to add or have mentioned about us. I answered that since I wasn’t really clear on what this article was going to be or what the intended audience was, I did not know what would be appropriate or interesting. I suggested that she could send me a draft of her article so that I might have a better context for giving her additional info. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










