Pololu Blog » User Profile: Kevin » Posts by Kevin »
Posts by Kevin (Page 6)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Polo-BOO! Halloween Sale
 |
Halloween is just a few short weeks away, and that means it’s time to start making an awesome costume or building an extravagant yard display (unless you’ve already been hard at work on one for months). Whether you want to dress up or decorate your home, we offer lots of products that can make your projects stand out, so we’re having a Halloween sale to help you get the parts you need!
From now until October 22, you can get 10% off hundreds of products, from servos and LEDs to sensors and programmable controllers. Even bigger discounts of up to 30% are available on a few select items. See the sale page for more details and the full list of products.
As always, we would love to hear about anything cool you make with our stuff, so please share it with us via email or on our forum; we might feature it on the blog! This month, we’ll be posting a series of Halloween-themed projects of our own to help inspire you.
New product: Raspberry Pi Model B+
 |
The Raspberry Pi single-board computer has been around for a little over two years in its original Model A and Model B versions, and in that time, it’s become a very popular platform for electronics experimentation. With many of the same capabilities as a regular desktop or laptop PC, but at a small fraction of the size and cost, the Raspberry Pi offers features like network connectivity and significant processing power for robots and other electronics projects.
|
|
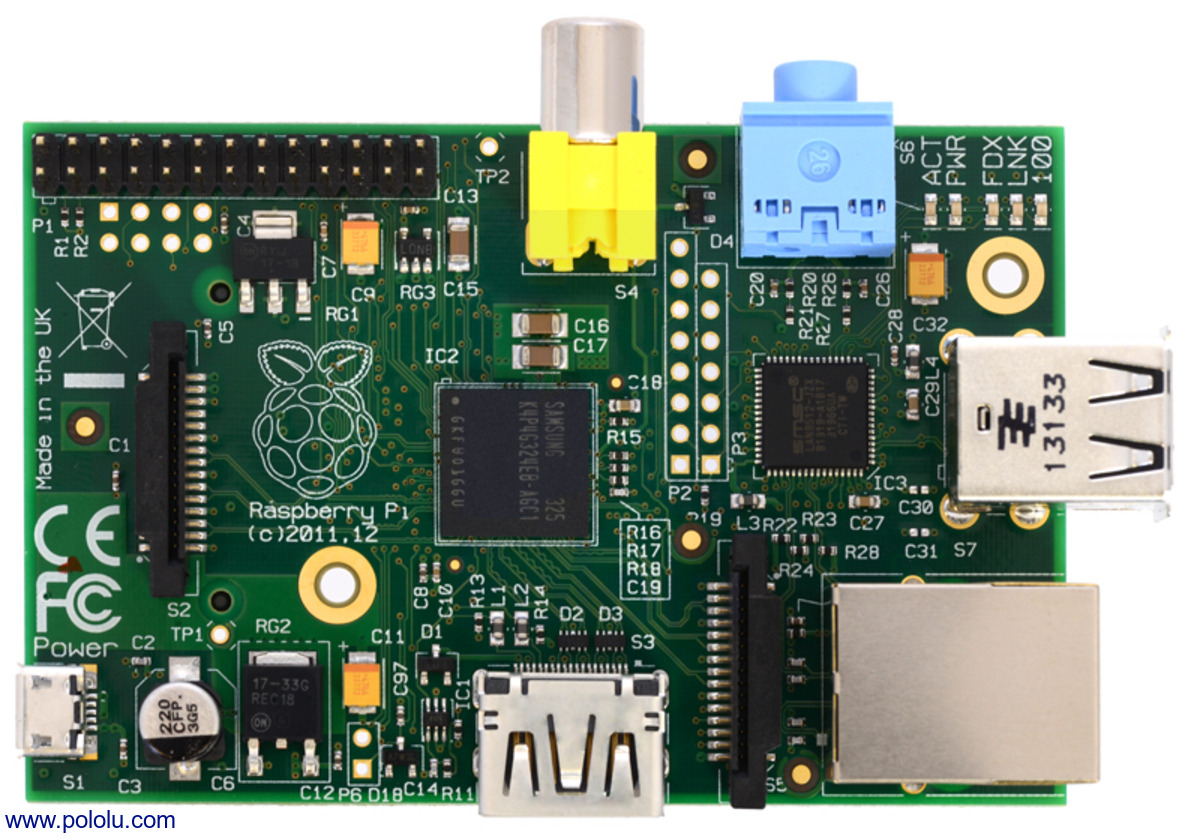
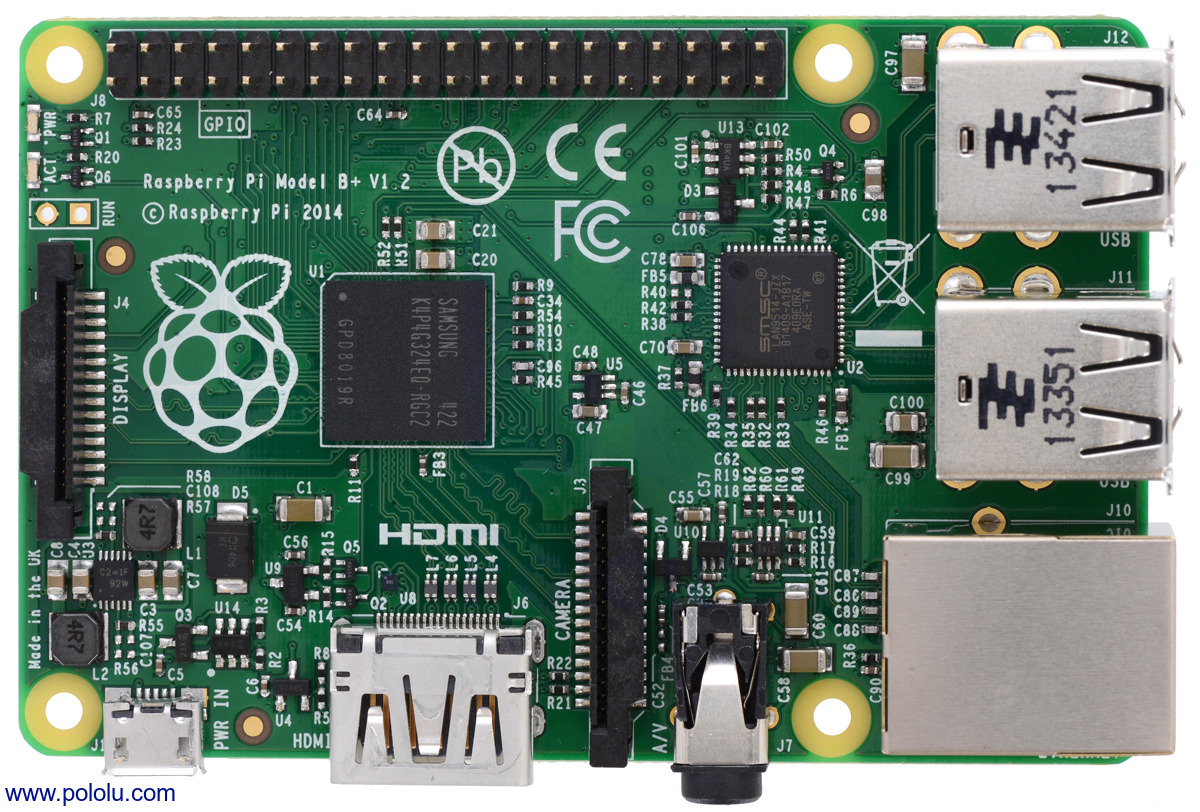
We’re now selling the new Raspberry Pi Model B+, which improves on the Model B in a number of ways:
- More GPIO pins are available on a 40-pin header; the Model B has a 26-pin GPIO header.
- The number of USB host ports has been doubled to four.
- Switching regulators lower the power consumption of the Model B+ by 0.5 W to 1 W compared to the Model B (which uses linear regulators), while audio is improved by a dedicated low-noise power supply.
- A much smaller microSD card socket replaces the previous full-size SD card socket.
- Audio and composite video output are combined on the 3.5 mm jack, and many of the connectors extend much less past the edge of the board (as does the inserted microSD card).
- Four mounting holes provide more flexibility in mounting the Model B+.
We’ve seen our customers build lots of cool projects with the Raspberry Pi, including a wirelessly-controlled Zumo robot with a video camera and a robotic ping-pong ball collector. We look forward to seeing what you’ll do with the Model B+!
Related products


New product: AltIMU-10 v4 gyro, accelerometer, compass, and altimeter
 |
Two weeks ago, we announced a big price reduction of our MEMS-based sensors and explained a little about why we release new versions of these boards so frequently. If you looked closely at the diagram showing the evolution of our ST MEMS sensor boards, you might have noticed that we’ve used each IC on a carrier board for that chip by itself, as well as on an IMU board combined with other sensors, with one exception: the LPS25H pressure sensor. When that post was written, we had recently released our LPS25H carrier, but we did not yet offer an IMU featuring this new barometer IC. The AltIMU-10 v3, which uses the older LPS331AP pressure sensor, was the newest AltIMU available from us at the time.
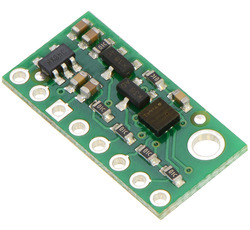
With the release of the AltIMU-10 v4 this week, that updated IMU is now available. Like the v3 version, the AltIMU-10 v4 contains an LSM303D three-axis magnetometer and accelerometer and an L3GD20H three-axis gyro, and it replaces the LPS331AP pressure sensor on the older board with the improved LPS25H, enabling pressure and altitude measurements with higher accuracy and lower noise.
We think the AltIMU-10 v4 combines the state of the art in ST’s MEMS sensors into one compact module at a great price. However, we’ve also put the AltIMU-10 v3 on clearance and lowered its price; if you don’t absolutely need ST’s newest pressure sensor on your IMU, the v3 is still a very good sensor board to consider.
Here’s an updated version of our diagram showing where the new AltIMU-10 fits in:
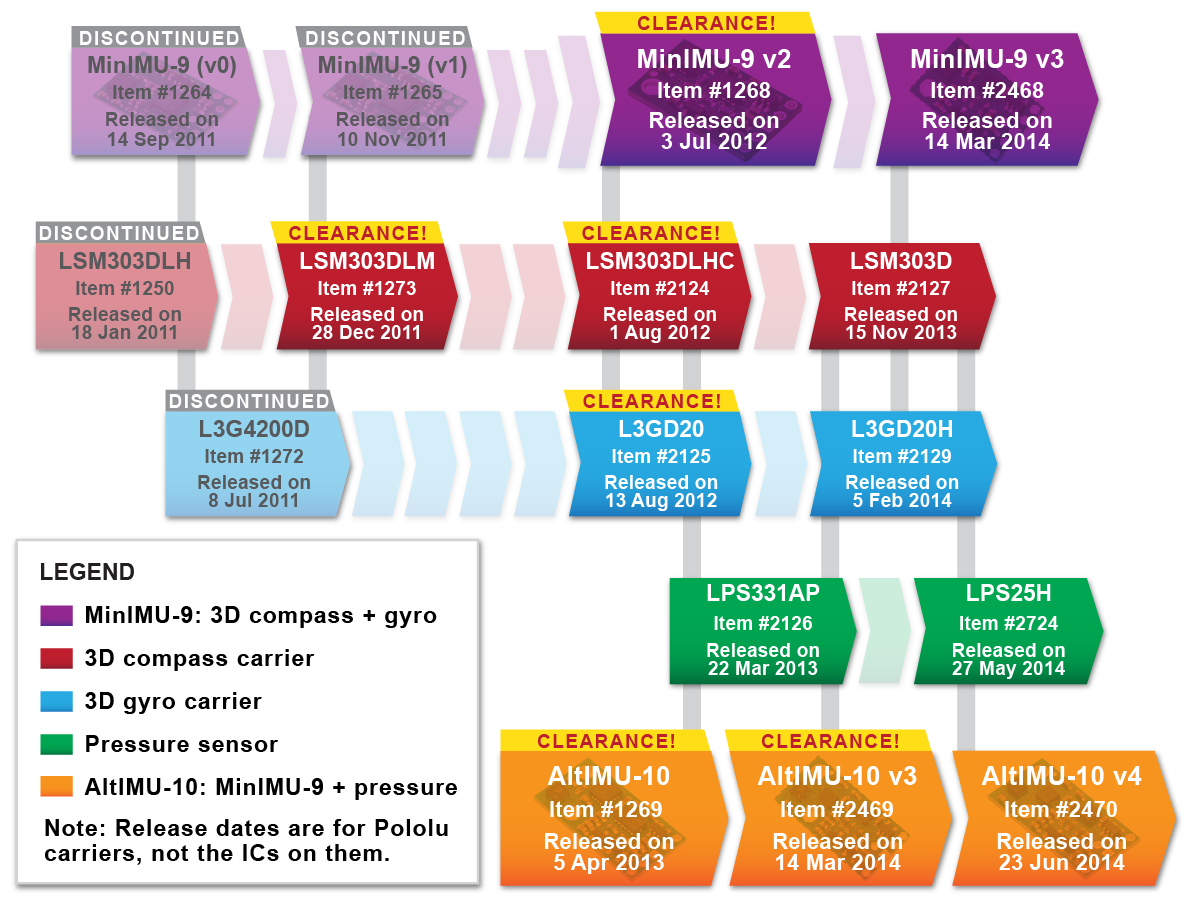 |
Evolution and release dates of Pololu carriers for ST’s MEMS sensors through June 2014. |
|---|
Related products





New product: CH Robotics UM7-LT orientation sensor
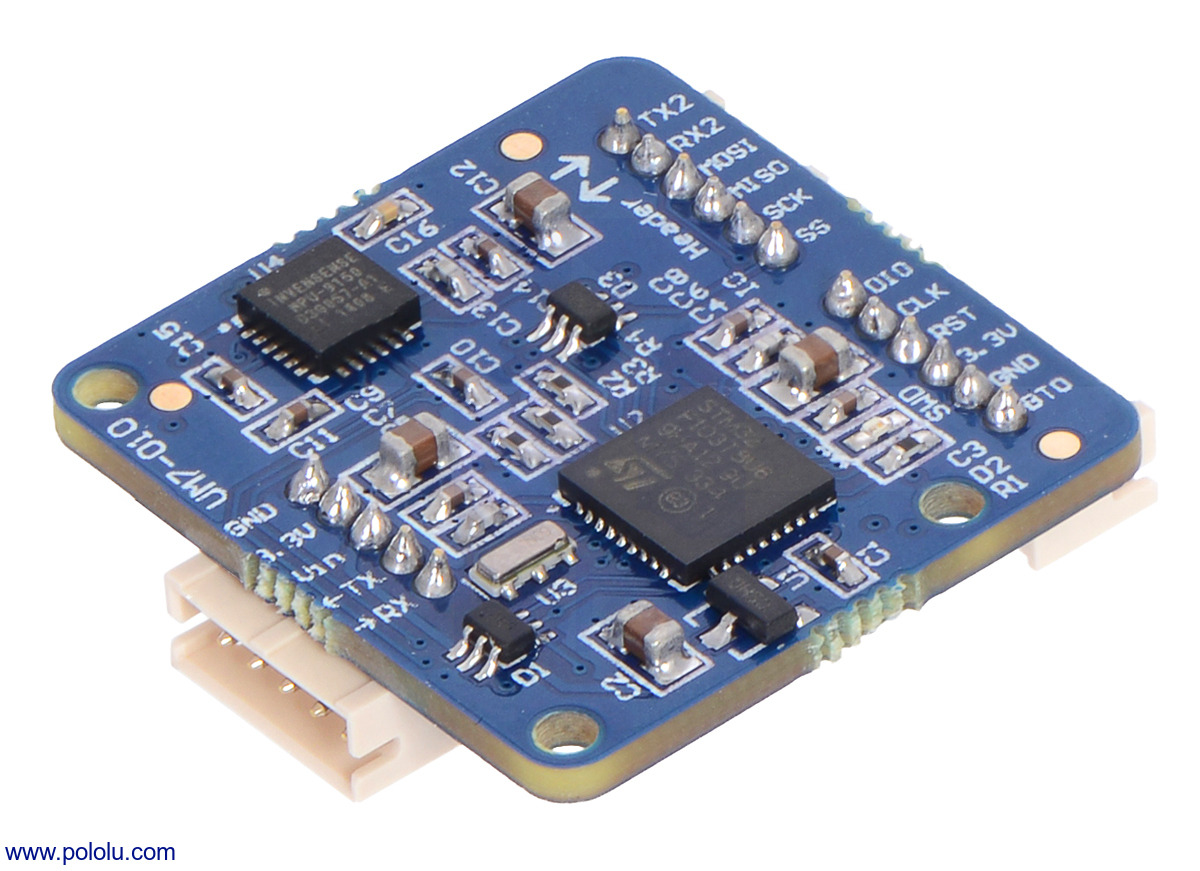 |
We’re now selling the UM7-LT orientation sensor, the latest Attitude and Heading Reference System (AHRS) from CH Robotics. The UM7 takes advantage of newer sensor technology to offer improved performance compared to its predecessor, the UM6, despite its reduced cost.
Like earlier CH Robotics AHRS modules, the UM7 contains an onboard microcontroller that combines data from its three-axis accelerometer, gyro, and magnetometer to produce orientation estimates 500 times a second. The attitude and heading information, available in the form of Euler angles or quaternions, can either be streamed automatically or provided upon request through a TTL serial interface.
 |
Power and serial connections can be made to the UM7-LT through a five-pin connector and an included matching cable, and expansion headers provide additional interfaces like SPI and a secondary UART that can be connected to an external GPS module. The free CHR Serial Interface software makes it easy to visualize data from the UM7 and configure its settings.
For more information about the UM7-LT, see its product page. A version of the UM7 with an enclosure, similar to the enclosed UM6, is expected to be available in the next few months.
Related products



New product: TPS2113A Power Multiplexer Carrier with USB Micro-B Connector
 |
Earlier this year we released a carrier for the Fairchild FPF1320, a power multiplexer that can switch between two separate power supplies, such as USB and a battery-powered 5 V regulator. The FPF1320 is great for transitioning between power sources based on an external selection signal, but by itself, it is not ideal for applications like a USB-powered microcontroller: it lacks a voltage sensor that would enable the switching to be both seamless and automatic. (By default, our carrier allows the output voltage to drop below 1.5 V whenever it switches from its preferred to alternate power source.)
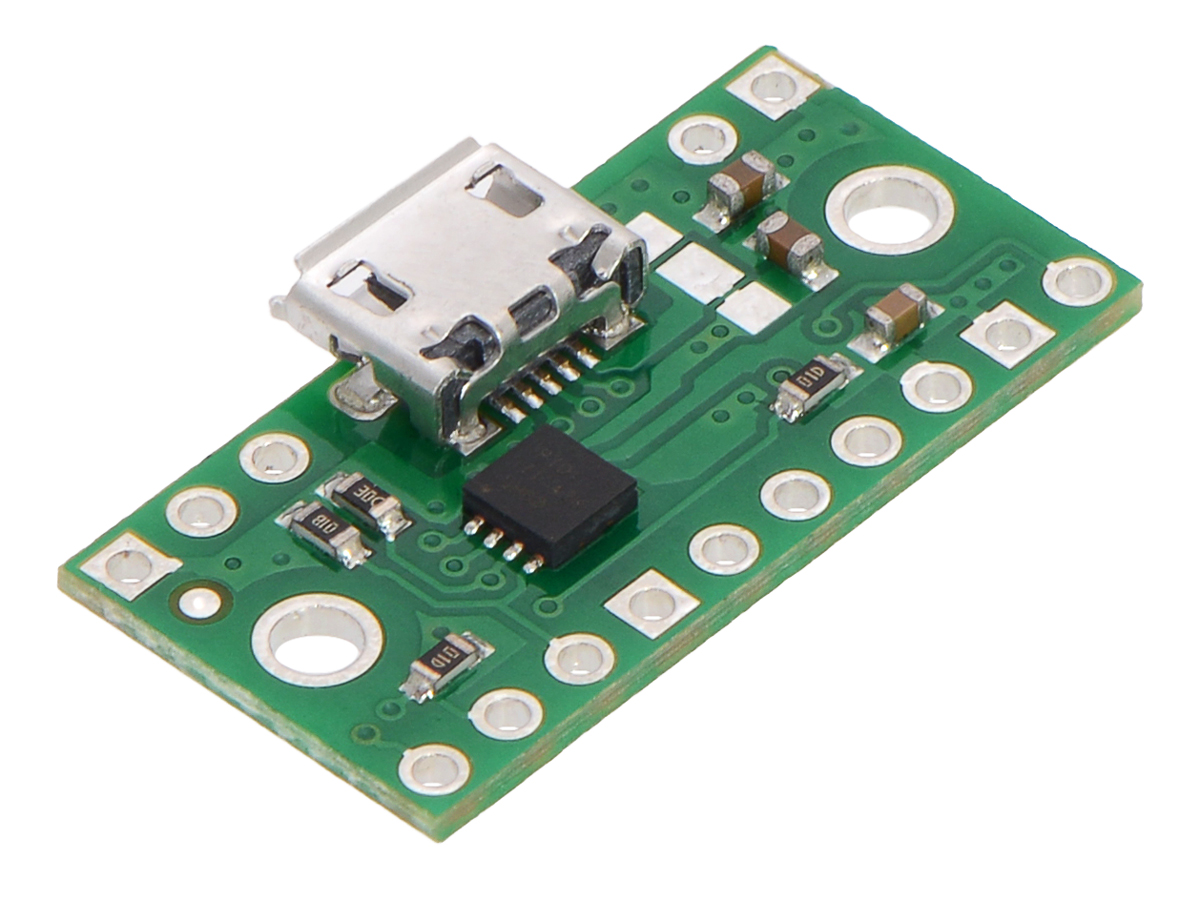
That’s why we’re excited about Texas Instruments’s TPS2113A, a power multiplexer with built-in voltage sensing that supports automatic seamless switching, and today we are happy to announce the release of our TPS2113A Power Multiplexer Carrier with USB Micro-B Connector.
The switching behavior of the TPS2113A depends on the state of its VSNS input. Our carrier pulls VSNS low through an on-board pull-down resistor, which causes the multiplexer to simply select the higher of the two input sources to pass to the output. However, adding another resistor between VSNS and the primary input source creates a voltage divider that allows you to set a precise threshold voltage at which the multiplexer will switch to the secondary source.
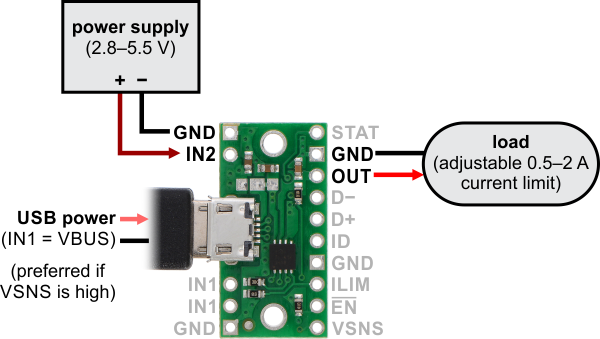 |
For example, the TPS2113A could be used to build a device that is primarily powered by USB, but switches to a secondary 5 V supply as soon as the USB voltage falls below 4.8 V. Since the multiplexer can prevent its output from falling below 4.8 V during the transition, it enables the system to be seamlessly connected to and disconnected from USB without noticeable power interruptions.
The TPS2113A offers additional features that can be useful in a power supply circuit, including an adjustable current limit and a status output that indicates which power source is currently selected. Our carrier board breaks out all of the chip’s pins, making it easy to connect additional components and customize the multiplexer’s behavior for a range of applications.
We think the TPS2113A is a great power switching solution for USB devices, and we look forward to using it in upcoming designs; keep an eye out for it in our future products!
Related products

New product: LPS25H pressure/altitude sensor carrier
We’ve just released a carrier board for ST’s newest pressure sensor, the LPS25H, and we’re also lowering the price of our LPS331AP carrier.
Like the LPS331AP, the LPS25H provides pressure readings over a range of 260 mbar to 1260 mbar (26 kPa to 126 kPa), and this data can be used to calculate the sensor’s altitude. Our LPS25H carrier mounts the sensor on a 0.4″ × 0.8″ board (0.1″ shorter than our earlier LPS331AP carrier) that breaks out all of its pins, and as usual, we’ve included level shifters and a regulator to make it easy to use in a 5 V system. Continued…
Tutorial: How to program a Zumo robot with Simulink
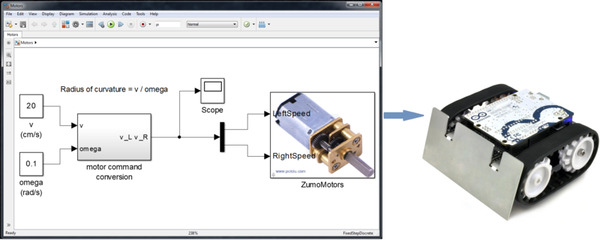 |
We posted about a Simulink library for the Zumo robot recently, and now a tutorial that teaches you how to use that library to program a Zumo robot with Simulink is available on the Adafruit Learning System. The guide walks you through setting up a Simulink model to make the Zumo follow a specific trajectory, then loading the generated code onto the Zumo to see it run.
Related post: Zumo robots programmed with Simulink by MathWorks
Related products



Zumo robots programmed with Simulink by MathWorks
MathWorks, the producer of technical computing software including MATLAB and Simulink, has released a Simulink library for the Zumo robot. The library provides blocks that represent all of the sensors and peripherals on our Zumo robot for Arduino, making it possible to program an Arduino-controlled Zumo robot using Simulink.
These Simulink-programmed Zumo robots have made a few appearances on MathWorks’ MakerZone blog. This article discusses the math behind programming a robot to follow a line, modeling the control system as a harmonic oscillator.
 |
MathWorks also used several Zumos as part of a demonstration at the Robot Zoo, part of the 2014 Cambridge Science Festival. You can read more about their Zumo demonstration, as well as their other robot exhibits, in their recap of the event.
 |
Related post: How to program a Zumo robot with Simulink
Related products
R2-DR, Kevin's dead reckoning robot

When I first started planning a robot for the recent LVBots dead reckoning competition, it was more or less a conventional design—a flat chassis with motors and circuit boards attached to the top and bottom—and I lost interest in it quickly because it felt like I was just reinventing the 3pi. I looked for a way to make the shape of the robot unique, and I noticed that the three-legged shape of R2-D2, the famous astromech droid from Star Wars, might be a good fit for a typical undercarriage composed of a ball caster and two wheels. The result of continuing along this line of investigation is my dead reckoning robot, R2-DR (you can probably guess what DR stands for). Continued…
New revision of the Dual VNH5019 motor driver shield for Arduino
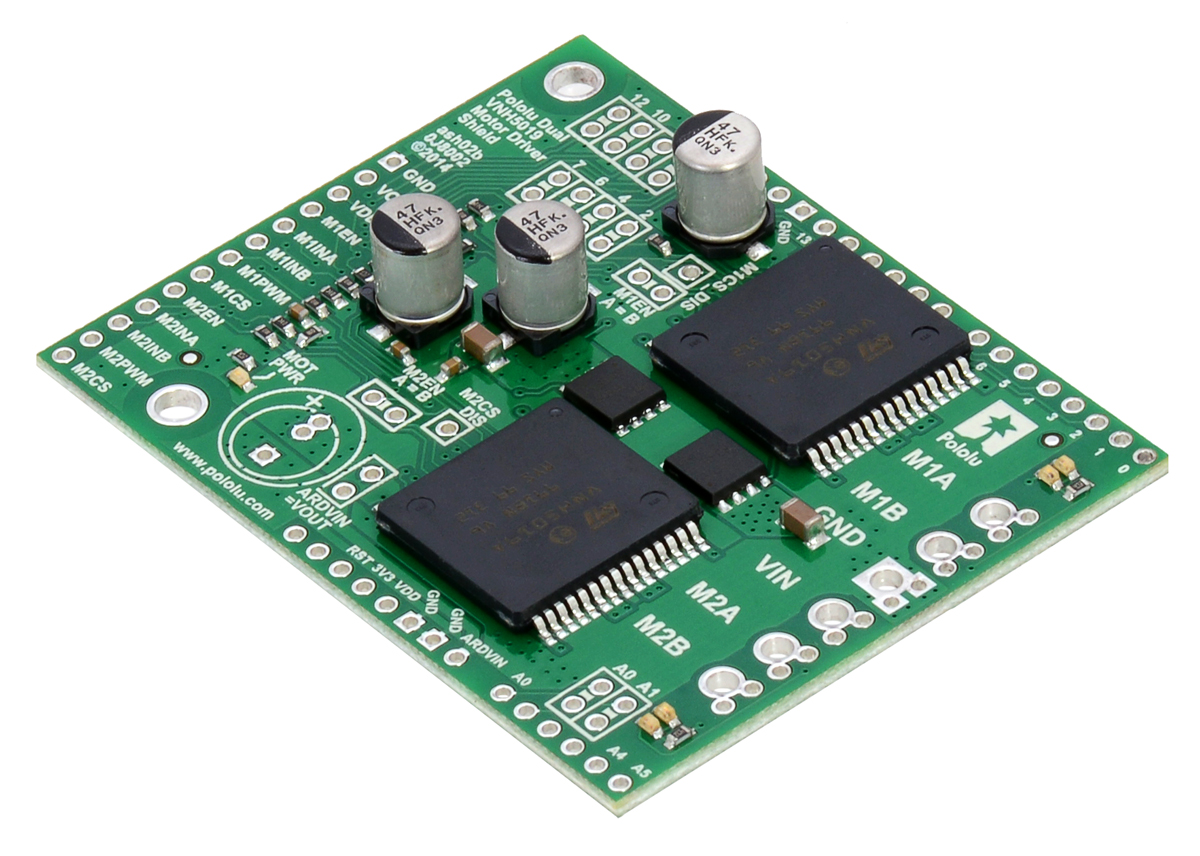 |
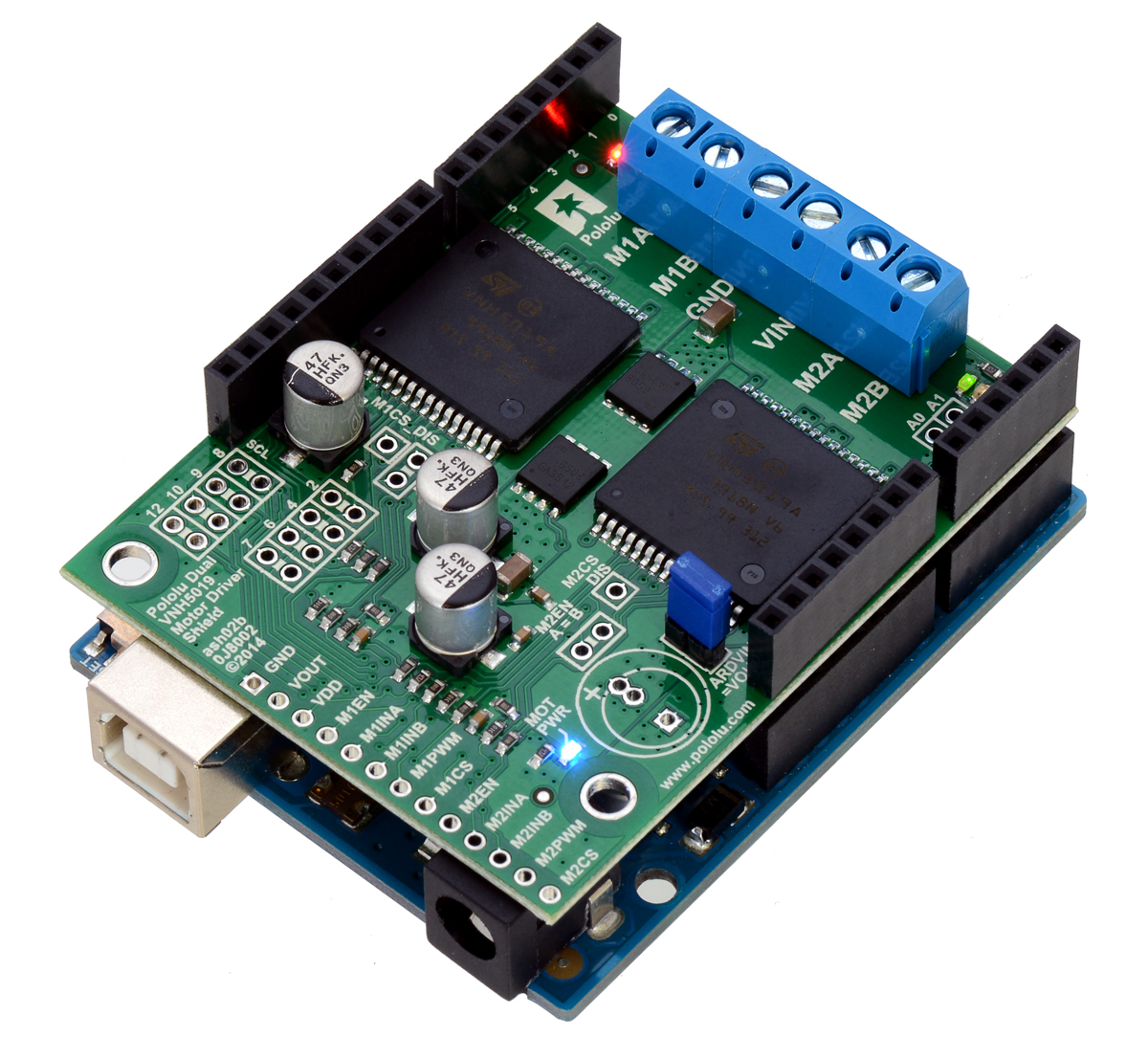
We’ve released an updated version of our dual VNH5019 motor driver shield for Arduino. The VNH5019 is a great solution for driving high-power motors, with each chip able to supply up to 12 A continuously at 5.5 V to 24 V. However, the original version of our dual VNH5019 shield was designed before the Arduino Uno R3 was released, so it lacked pass-throughs for the four new pins (SCL, SDA, IOREF, and an unused pin) introduced by the R3 and present on all newer Arduinos. This makes it harder to stack other shields with it, especially ones that make use of the new I²C pin location. The latest board revision adds these pass-throughs to make the shield fully compatible with the Uno R3 pinout.
 |
For more information, see the dual VNH5019 motor driver shield product page and user’s guide.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










