Pololu Blog »
New product: CH Robotics UM7-LT orientation sensor
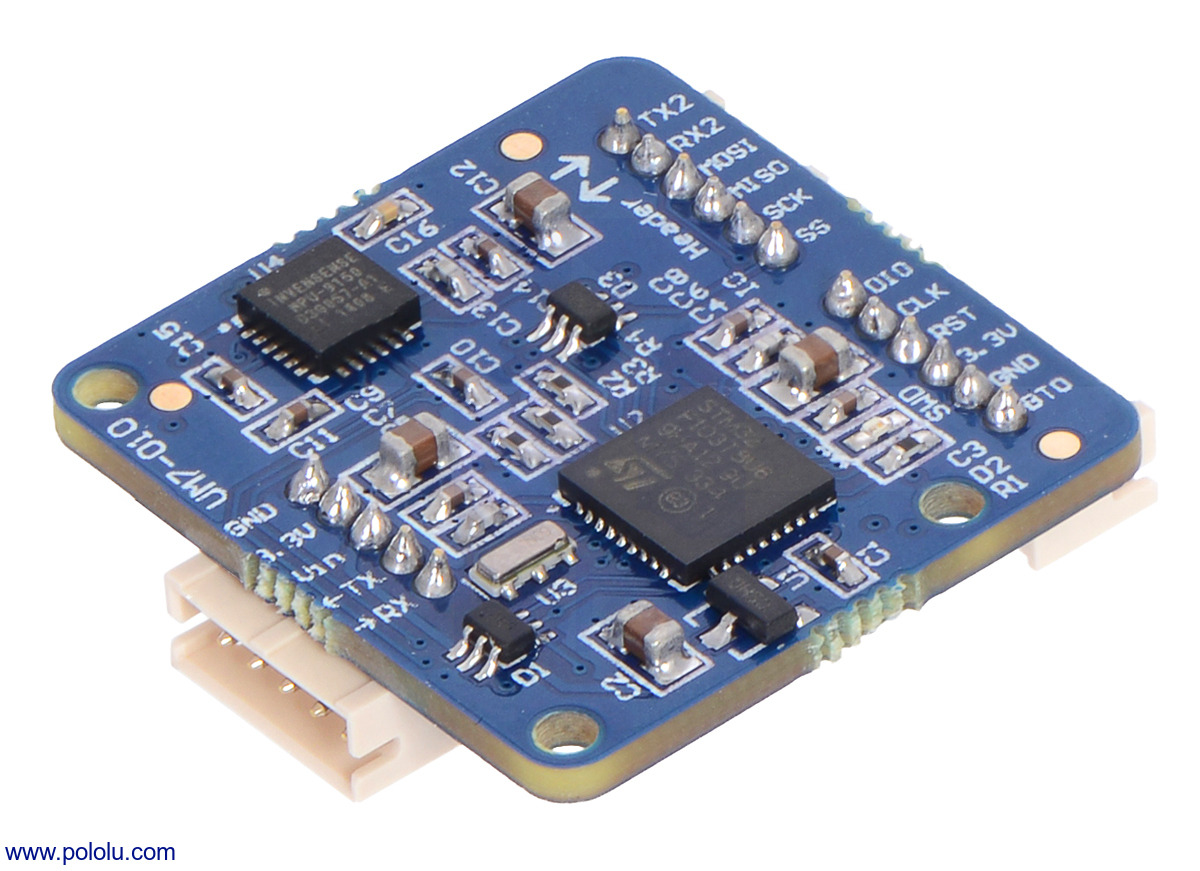 |
We’re now selling the UM7-LT orientation sensor, the latest Attitude and Heading Reference System (AHRS) from CH Robotics. The UM7 takes advantage of newer sensor technology to offer improved performance compared to its predecessor, the UM6, despite its reduced cost.
Like earlier CH Robotics AHRS modules, the UM7 contains an onboard microcontroller that combines data from its three-axis accelerometer, gyro, and magnetometer to produce orientation estimates 500 times a second. The attitude and heading information, available in the form of Euler angles or quaternions, can either be streamed automatically or provided upon request through a TTL serial interface.
 |
Power and serial connections can be made to the UM7-LT through a five-pin connector and an included matching cable, and expansion headers provide additional interfaces like SPI and a secondary UART that can be connected to an external GPS module. The free CHR Serial Interface software makes it easy to visualize data from the UM7 and configure its settings.
For more information about the UM7-LT, see its product page. A version of the UM7 with an enclosure, similar to the enclosed UM6, is expected to be available in the next few months.
Related products



-

Geiger counter using A-Star
- 25 June 2014The inside of the Geiger counter. The home-made Geiger counter featured in this post by forum user bob_day uses an A-Star 32U4 Micro, LND 7313...
-

Wi-Fi controlled Zumo Chassis with DRV8835 and GoPro
- 26 June 2014Forum user Pablo shared his Wi-Fi controlled robot with pictures and videos from his Instagram. In Pablo’s forum post, he summarizes his project,...
6 comments

They are hard to find with cables.

You can get those cables from CH Robotics (the manufacturer of the UM7-LT Orientation Sensor).
-Derrill

Thanks.

We do not know the details of how the firmware for the UM7-LT was developed. You might try contacting the manufacturer, CH Robotics, to learn more about that.
-Jon

I recently bought UM7. I wish to receive the data using SPI communication. Serial communication seems to work but the SPI communication does not provide sensible data. Can you guys help me out? I can provide further information if required.
Best regards,
Like I mentioned in my reply to your email about this same issue, we do not really have any more specific advice than what is already being discussed in the thread on the Arduino forum that you started:
https://forum.arduino.cc/index.php?topic=616027
In general, if the other UM7 that you ordered has the same issue, that is more concrete evidence that there is an issue with your setup or code. Also, you might try directly contacting RedShift Labs, who has taken over from CH Robotics as manufacturer of the UM7:
https://www.redshiftlabs.com.au/
-Jon
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
