Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 13)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Estrella Intersects the Plane
 |
This art installation by Matthew Richard uses 10 OctoBrite DEFILIPPI modules, 80 RGB LEDs, 40 servos, 7 servo controllers, and an Arduino.
Featured link: http://cargocollective.com/mrichard/Estrella-Intersects-the-Plane
3pi PCB skeleton
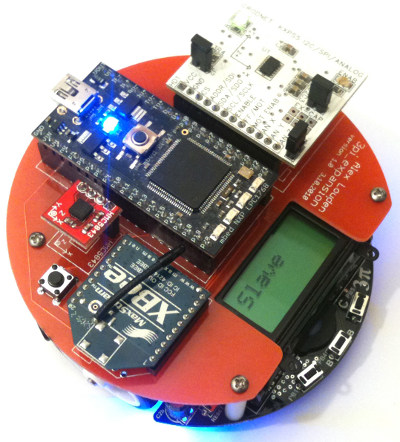 |
Alex Louden has released an open-source template for custom 3pi expansion boards for use with the Eagle PCB design software. The picture shows an example expansion with an mbed microcontroller, Xbee, and accelerometers.
Featured link: http://alexlouden.com/2010/3pi-pcb-skeleton/
Interfacing a FrSky telemetry receiver with a Baby Orangutan.
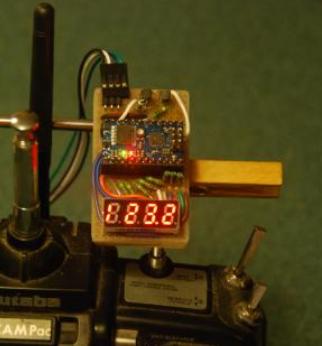 |
Forum user erik46 wrote up a document (523k pdf) showing how to read FrSky telemetry data and display it with a Baby Orangutan. The whole setup is small and light enough to clip on to an RC transmitter. For more information, see his forum post.
Obstacle Avoider
This simple obstacle-avoiding robot by forum user TomatoWire is based on the Maestro and uses continuous-rotation servos and distance sensors. The robot is programmed using the Maestro’s internal scripting language, without the need for an additional microcontroller.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=2756
Using the Pololu Pushbutton Power Switch
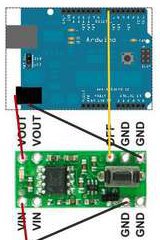 |
This instructable shows how to power an Arduino through the Pololu Pushbutton Power Switch and use the self-shutoff feature.
Featured link: http://www.instructables.com/id/Using-the-Pololu-Pushbutton-Power-Switch/
Maestro Support for RoboRealm
 |
This module for RoboRealm provides an interface to the Pololu Maestro USB servo controllers, linking advanced video processing to RC servo motion control.
Featured link: http://www.roborealm.com/help/Pololu_Maestro.php
R2D2 dome position control
 |
This replica of the famous Star Wars droid R2D2, built by Glenn Pipe, uses a Jrk USB motor controller for position control. The video below shows how Glenn uses the Jrk Configuration Utility to control and analyze his system, and his blog post has more information.
Featured link: http://astromech.wordpress.com/2010/02/05/adding-position-control-to-r2s-dome/
Paparazzi Autopilot for Linux
 |
Patrick Hickey and Bradley Lord use a Pololu Micro Maestro for servo output and a Pololu 4 servo multiplexer to support manual control override in their model aircraft autopilot project.
Featured link: http://moreproductive.org/autopilot/
The Haunted Organist by Mark Goodson
Customer Mark Goodson constructed this spooky animatronic skeleton using the Jrk USB Motor Controller. See the final result below:
Featured link: http://www.youtube.com/watch?v=wiimQNGnNBY
Beacon Locating Robot - Powered by Arduino and IR Transceiver
 |
This beacon-chasing robot by Christopher Hazlett was built with our IR Beacon, an RP5 Tracked Chassis, and an Arduino.
23 Oct 2018 edit: You can find a video of it driving here and a GitHub page here.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










