Pololu Blog » User Profile: Kevin » Posts by Kevin »
Posts by Kevin (Page 3)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier
 |
December 2020 update: ST originally specified a 3 m (10 ft) maximum range for the VL53L3CX, and we initially released this product with the name “VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier with Voltage Regulator, 300cm Max”. However, they have since released an updated API with software improvements that increase the maximum range to 5 m (16 ft), so we have updated the name of this product accordingly. The latest version of the API should enable this increased range on existing boards as well as new ones; the hardware has not changed.
Please note that the rest of this post has not been updated to reflect the increased 5 m range (which now exceeds the VL53L1X’s 4 m range).
We are now offering a VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier. The VL53L3CX is one of ST’s latest ranging sensors featuring their FlightSense technology, which determines distance by measuring how long it takes for emitted light to be reflected from a target and arrive back at the sensor. It can work at distances of up to 3 m, putting the VL53L3CX’s effective range in between those of ST’s older VL53L1X and VL53L0X integrated lidar modules.
Beyond just being an intermediate option, the VL53L3CX is interesting because it has the ability to detect multiple targets within its field of view. This is possible because instead of picking out a single distance based on the reflections received by the sensor, the VL53L3CX outputs histogram data representing how much reflected light it is receiving within different time intervals. The host processor can then read this data through a digital I²C interface and analyze it using special algorithms that ST provides as part of their VL53L3CX API.
This enhanced capability does come at a cost: the added complexity of the histogram processing means that the host requires much more RAM and program memory, making the VL53L3CX difficult to use with small microcontrollers. In our testing, we were unable to fit the VL53L3CX API on a typical 8-bit Arduino, and we are not providing an Arduino library to support the VL53L3CX; therefore, we recommend sticking with the VL53L1X or VL53L0X for applications with similar constraints. However, if you have more resources available on something like a 32-bit processor, the VL53L3CX’s multi-target detection might give you valuable information beyond what you could determine from a distance reading alone.
For more information about the VL53L3CX carrier, see its product page. The first 100 customers can use VL53L3CXINTRO to get up to 7 units for just $7.77 each!

Related products



New products: D36V50Fx Step-Down Voltage Regulators
 |
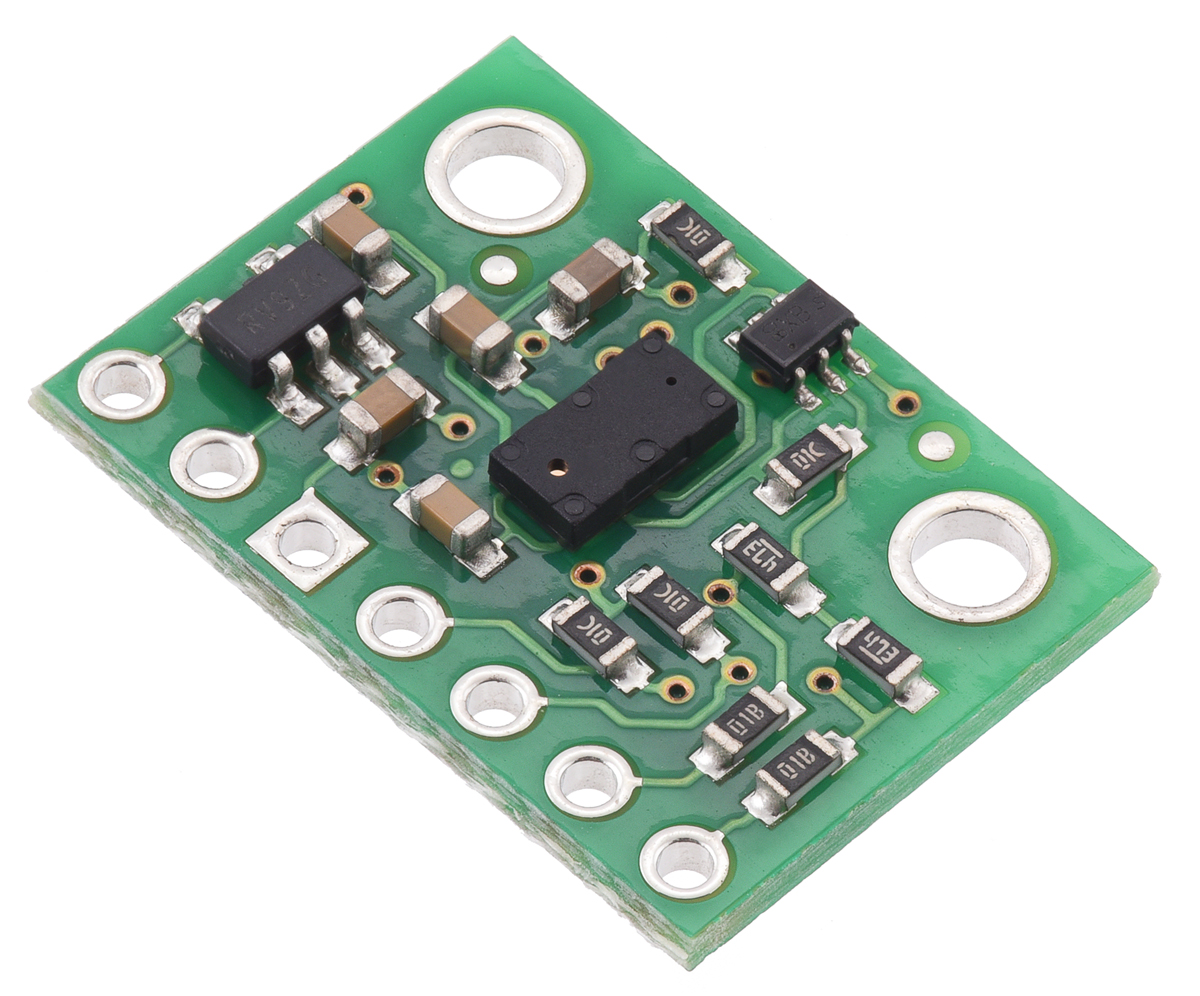
We have a new set of regulators to announce: the D36V50Fx family of step-down voltage regulators. Measuring a compact 1″ × 1″, these regulators support input voltages up to 50 V and can typically deliver around 5 A of current, although some versions can output much more under certain conditions.
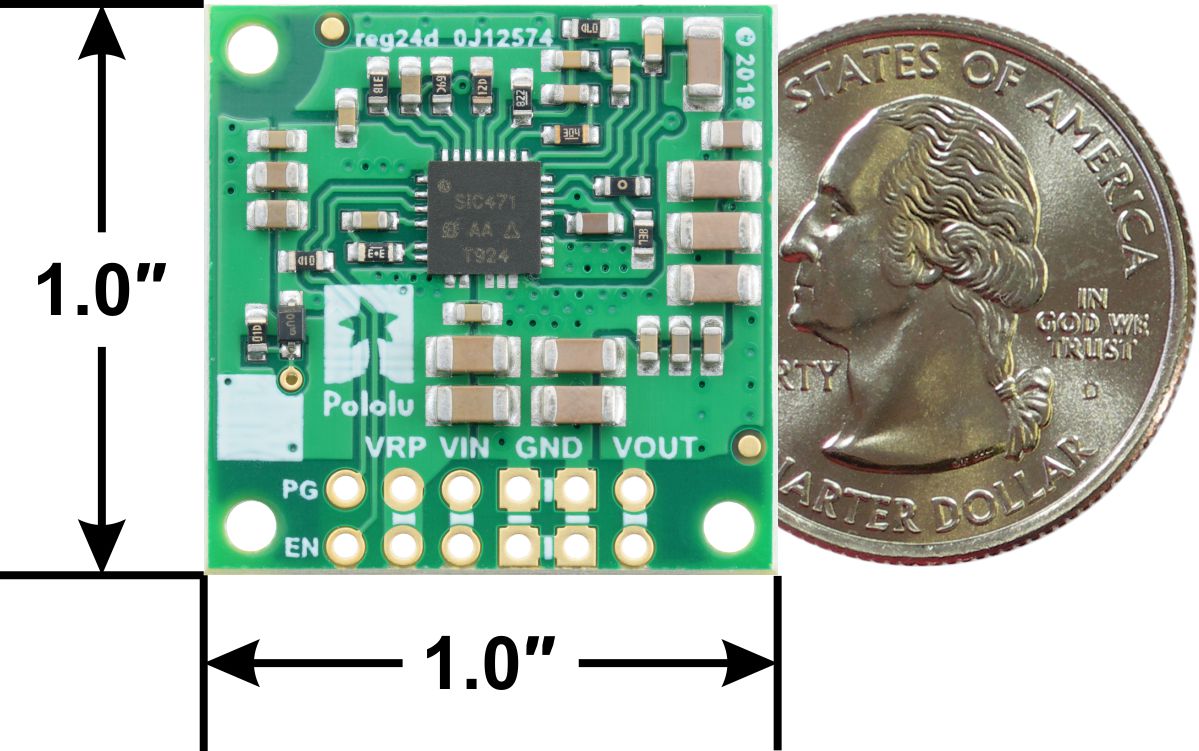 |
Step-Down Voltage Regulator D36V50Fx, bottom view with dimensions. |
|---|
The family consists of six fixed output voltage versions between 3.3 V and 12 V:
- D36V50F3: Fixed 3.3V output
- D36V50F5: Fixed 5V output
- D36V50F6: Fixed 6V output
- D36V50F7: Fixed 7.5V output
- D36V50F9: Fixed 9V output
- D36V50F12: Fixed 12V output
We can also manufacture a customized version for you here in our Las Vegas facility. For example, we could make regulators with a different output voltage that your project needs, or we could replace the 40 V reverse voltage protection MOSFET with a 20 V one for slightly improved efficiency if your input voltage will always be lower than 20 V. If you are interested in customization, please contact us for more information.
Comparison to other regulators
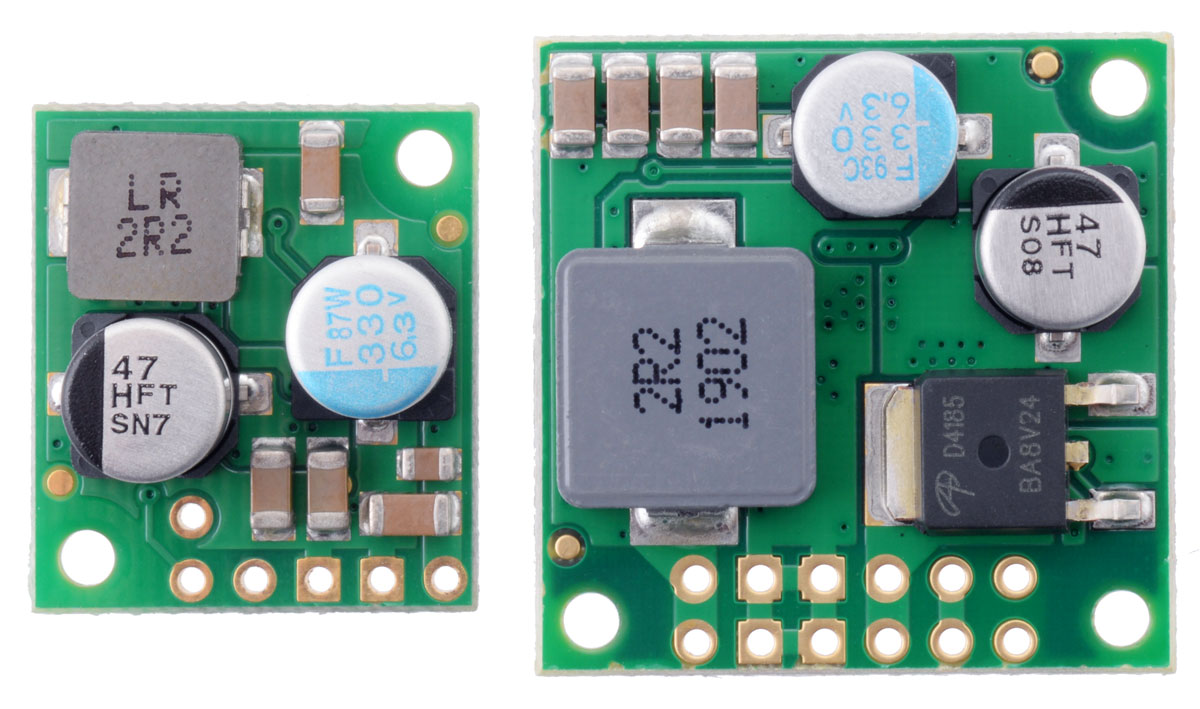 |
D36V28Fx and D36V50Fx Step-Down Voltage Regulators. |
|---|
The D36V50Fx regulators are larger and more powerful counterparts to the D36V28Fx family we introduced last year, with the same input voltage ranges and mostly similar characteristics. What distinguishes the two families in performance is that the D36V50Fx regulators can provide roughly double the output current! (At the high end of the input voltage range, the difference is generally less dramatic.)
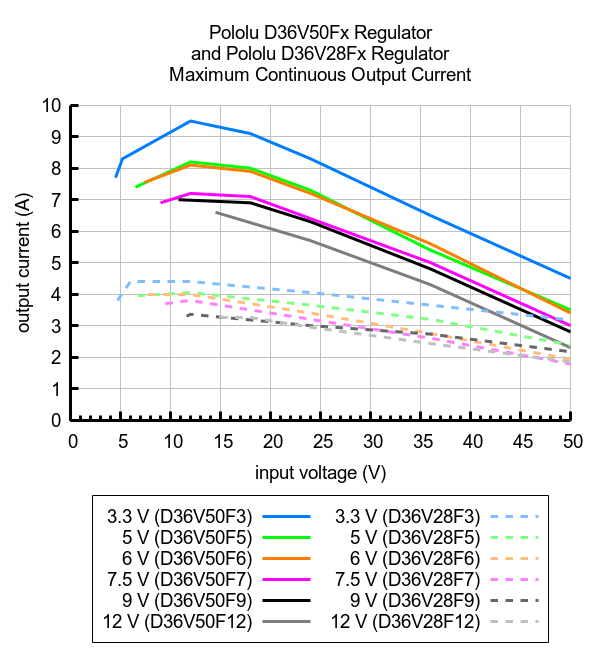 |
Comparison of the maximum continuous current of Step-Down Voltage Regulators D36V50Fx and D36V28Fx. |
|---|
And since many of our most popular regulators are 5 V modules, here is a graph comparing the new D36V50F5 (in blue) with two of our older high-power regulators, the D24V90F5 and the D24V50F5:
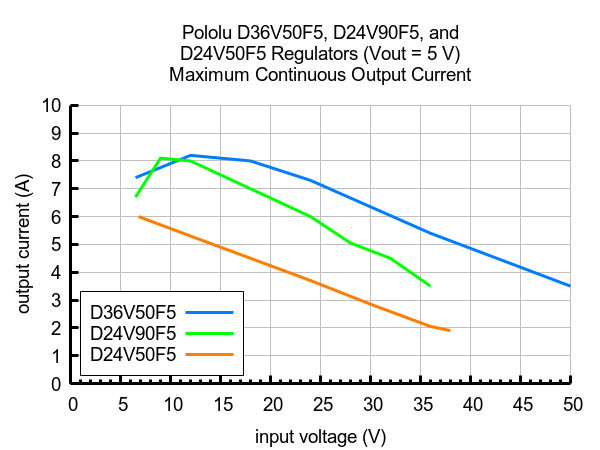 |
Comparison of the maximum continuous current of 5V Step-Down Voltage Regulators D36V50F5, D24V90F5, and D24V50F5. |
|---|
Introductory special
As usual, we are offering an extra introductory special discount on these new regulators, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code D36V50FXINTRO can get up to 3 units of each version for just $11.95 each!

Related products






New product: USB 2.0 Type-C Connector Breakout Board
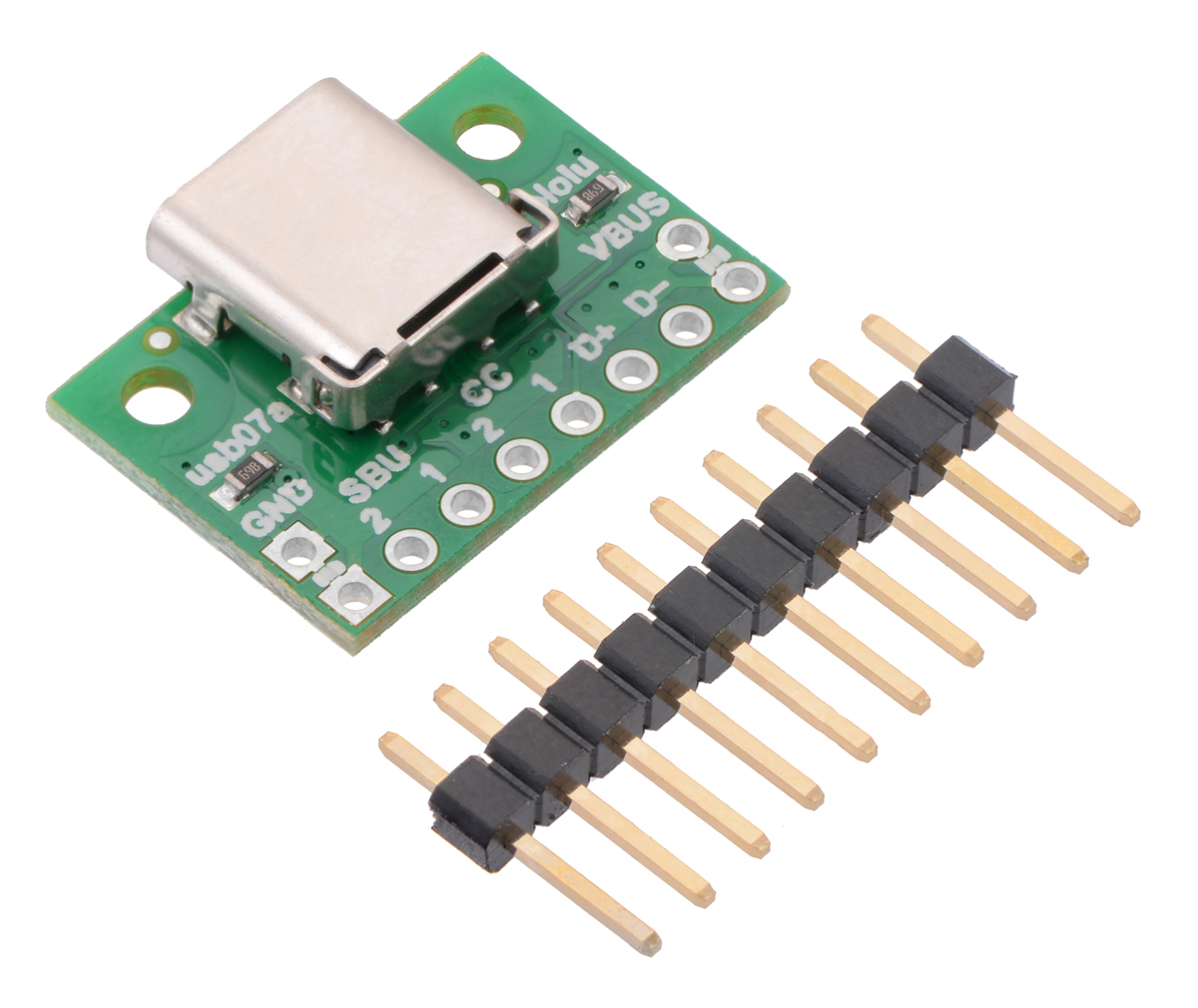 |
We have just released our USB 2.0 Type-C Connector Breakout Board. The Type-C connector has become increasingly common on devices like smartphones and notebook computers over the past few years, and it offers a number of interesting improvements over the legacy USB A and B connectors it is supposed to replace.
One of the most noticeable features is that the connector is reversible: you can plug a Type-C cable into a receptacle with either side up, and since Type-C ports can be used for both USB hosts and USB devices, the two ends of the cable can be interchangeable too. The USB-C specification also provides for negotiation of increased power (up to 20 V and 5 A) and alternate uses of the USB interface wires.
 |
All of this flexibility comes at a cost. The Type-C connector itself, which measures about 1 cm (0.4″) square, has 24 separate tightly-packed pins:
- 4 power pins (VBUS)
- 4 ground pins
- 4 USB 2.0 data pins (D+ and D−, each duplicated for reversibility)
- 8 USB 3.1 SuperSpeed data pins
- 2 configuration pins
- 2 auxiliary (sideband) pins
Making all the required connections for a prototype or hobby project is therefore a much more daunting task with a USB-C receptacle compared to a Type-A or Type-B connector with only 4 or 5 pins. This is where our Type-C connector breakout board comes in, exposing all the pins necessary for USB 2.0 communication along a row of 0.1″-spaced holes. (Note that the board does not break out the USB 3.1 SuperSpeed differential pairs.)
If you are designing something that uses USB-C, you also need to consider what to do with the Configuration Channel (CC) pins. These pins are used to determine the role of a port when it is connected—whether it is a USB host or device, and whether it provides or consumes power—and they are also used to configure more advanced functionality like higher-voltage power delivery and alternate modes that allow other protocols over the USB interface.
Since we expect many users of this breakout board to employ it as a USB device port, we populate the board with pull-down resistors on the CC pins that make it a straightforward replacement for a Type-B, Mini-B, or Micro-B port. If you have a different application in mind, you might want to disconnect or remove the resistors yourself, or you can contact us about customizing the termination resistors.
We are interested in hearing any feedback you might have about the USB Type-C connector in general, this board in particular, and any follow-on boards you would like to see. Are you excited about using Type-C connectors instead of Micro-B? Would you have a use for the USB 3.1 SuperSpeed pins brought out to 0.1″-spaced holes? Do you want something with an on-board configuration controller that makes it easier to set up USB Power Delivery or other advanced functionality? Please share your thoughts in the comments below.
As with all our new products this year, we are offering a special introductory promotion. You can get up to three of the new breakout boards for just $1.92 each, limited to the first 100 customers using coupon code USBCINTRO.
Related products

PyTic - Python interface for Pololu Tic Stepper Motor Controllers
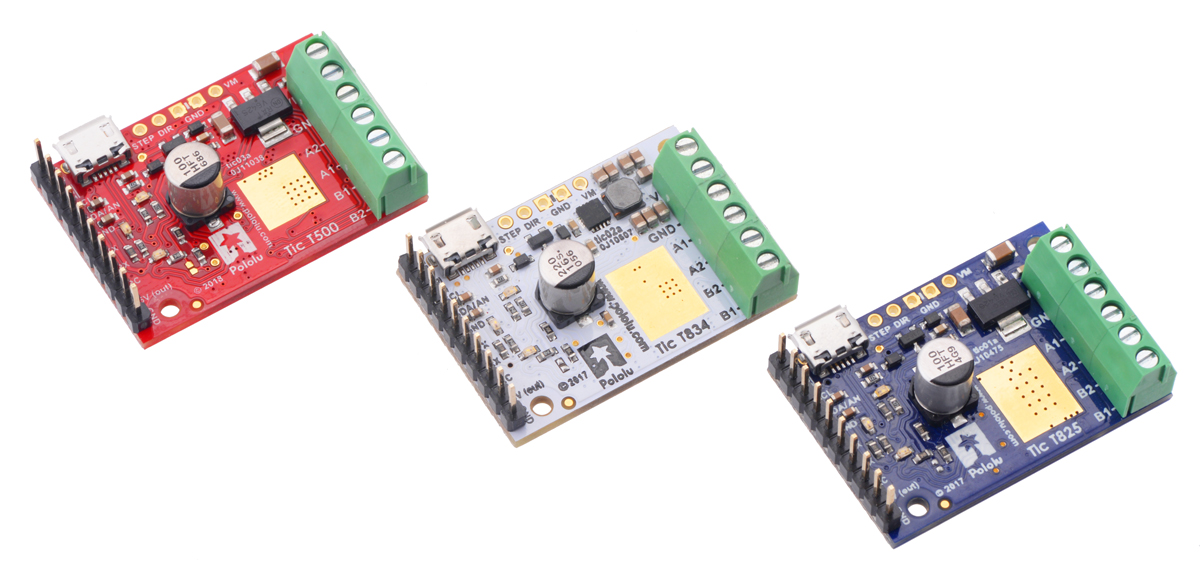 |
Customer Daniel Castelli of the Allen Institute has released a Python package for interfacing with our Tic Stepper Motor Controllers. Currently, he only supports 64-bit Windows, but the source code is available and should be straightforward to extend to other operating systems. Here is example code using PyTic to control a stepper motor:
import pytic
from time import sleep
# - Initialization -------------------------------------------
tic = pytic.PyTic()
# Connect to first available Tic Device serial number over USB
serial_nums = tic.list_connected_device_serial_numbers()
tic.connect_to_serial_number(serial_nums[0])
# Load configuration file and apply settings
tic.settings.load_config('path\\to\\config.yml')
tic.settings.apply()
# - Motion Command Sequence ----------------------------------
# Zero current motor position
tic.halt_and_set_position(0)
# Energize Motor
tic.energize()
tic.exit_safe_start()
# Move to listed positions
positions = [1000, 2000, 3000, 0]
for p in positions:
tic.set_target_position(p)
while tic.variables.current_position != tic.variables.target_position:
sleep(0.1)
# De-energize motor and get error status
tic.enter_safe_start()
tic.deenergize()
print(tic.variables.error_status)
The code and documentation for this package are available on GitHub.
Related products








Now available: VL53L1X library for Arduino
We’ve released a basic VL53L1X library for Arduino to make it easier to get started using an ST VL53L1X time-of-flight distance sensor with an Arduino-compatible controller.
Because of how complex the VL53L1X is and how difficult it is to learn how it works, developing a library for it has been more of a challenge than writing one for a typical sensor like an LSM303 accelerometer/magnetometer. Continued…
Now for Raspberry Pi too: Dual G2 High-Power Motor Drivers
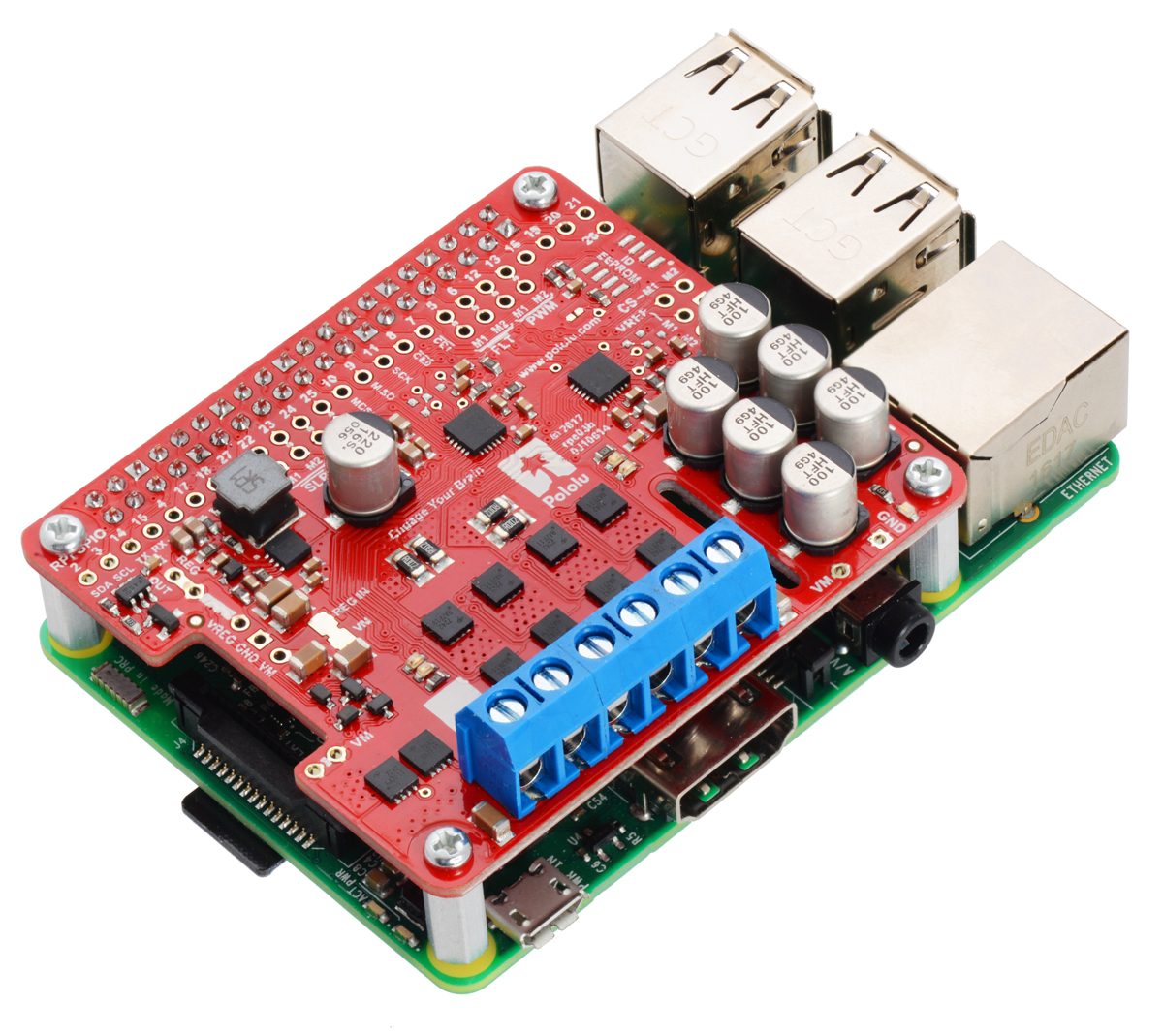 |
As Jan promised yesterday, our new dual motor drivers are now also available as Raspberry Pi expansion boards! The Dual G2 High-Power Motor Drivers for Raspberry Pi feature two discrete MOSFET H-bridges on a board designed to plug directly into a Raspberry Pi (Model B+ or newer), and they also include an integrated 5 V, 2.5 A switching step-down regulator that allows a single power supply to power both the motors and the Raspberry Pi. We provide a Python library for Raspberry Pi to make it easy to get started using the drivers.
|
|
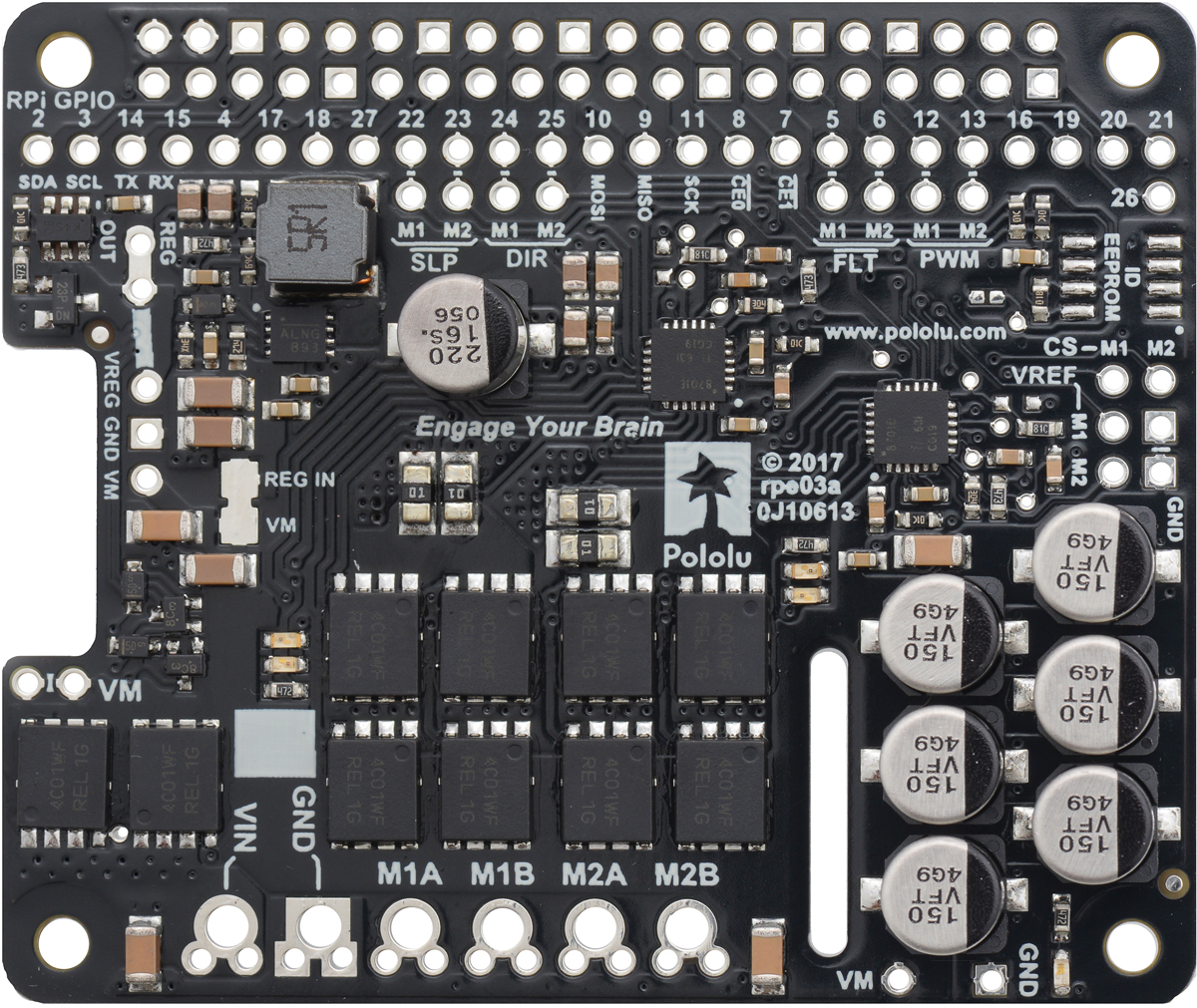
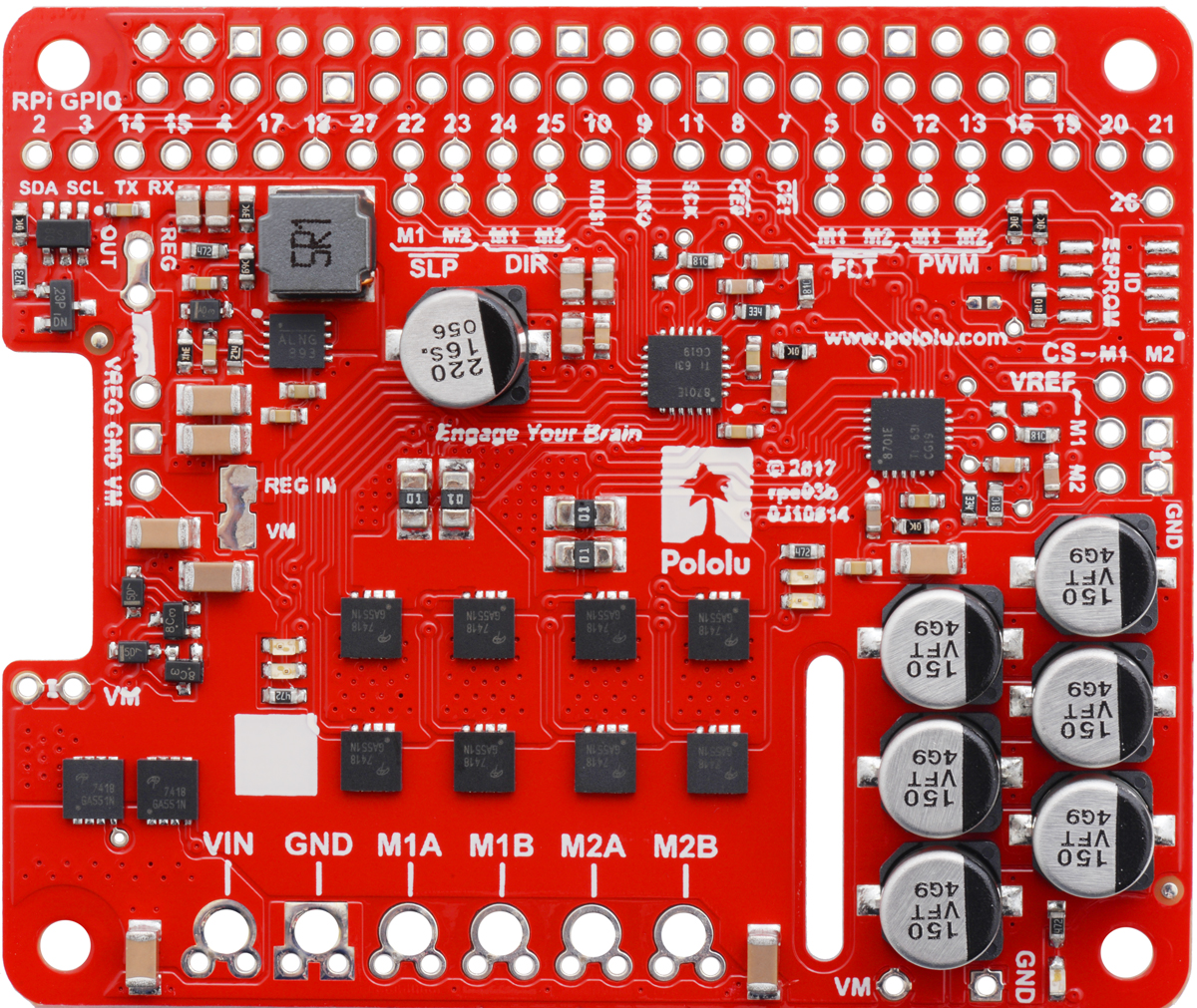
As with the Arduino shield (or standalone) versions, two different PCBs are used for these drivers: the black board has 5×6 mm MOSFETs and the red board has 3×3 mm MOSFETs. Again, each board is available with 30 V or 40 V MOSFETs for a total of four options:
 Dual G2 High- Power Motor Driver 18v22 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 18v18 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 24v18 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 24v14 for Raspberry Pi |
|
|---|---|---|---|---|
| Absolute max input voltage: |
30 V | 36 V* | ||
| Max nominal battery voltage: |
18 V | 28 V | ||
| Max continuous current per channel: |
22 A | 18 A | 18 A | 14 A |
| Default active current- limiting threshold: |
60 A | 50 A | 40 A | |
| Available with connectors installed? |
No | Yes | No | Yes |
* 40 V if regulator is disconnected
Unlike the Arduino, the Raspberry Pi does not have analog inputs, so there isn’t an easy way to do current sensing with these boards. However, the current sensing pins are exposed for advanced users who might want to add an external ADC or otherwise make use of the current sense feedback.
Until now, our motor driver offerings for the Raspberry Pi have been limited to our dual MC33926 and DRV8835 add-on boards, which handle much less current. One of our other favorite integrated motor drivers, the VNH5019, would have been a nice step up in power from the MC33926, but it has one big downside…literally. Its footprint measures around 17 mm by 19 mm, and you can see that on our dual VNH5019 Arduino shield, the two driver ICs take up most of the width of the board:
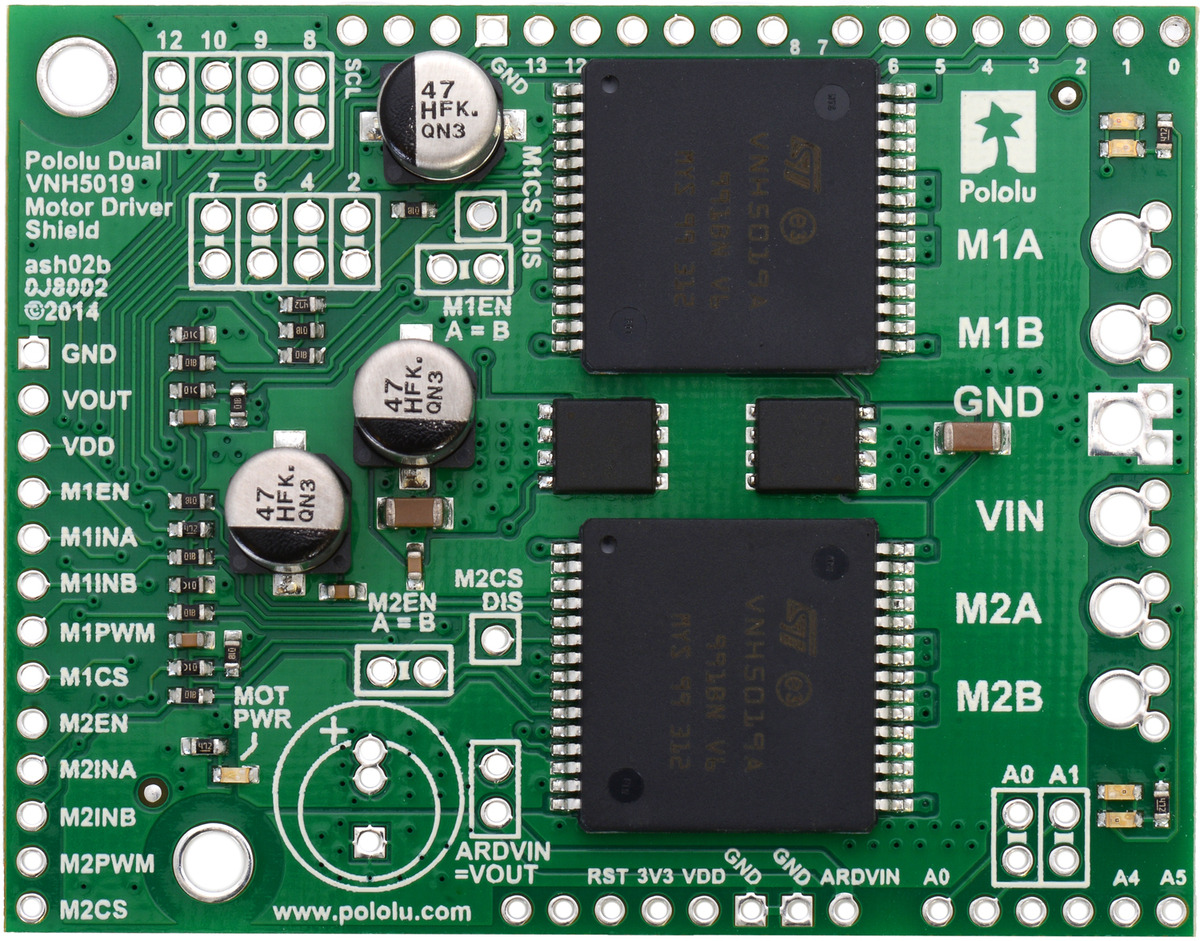 |
Pololu dual VNH5019 motor driver shield for Arduino. |
|---|
We try to make our Raspberry Pi expansion boards conform to the HAT (Hardware Attached on Top) mechanical specification when we can, and that spec recommends including a slot in the middle of the board to accommodate a flex cable plugging into the Raspberry Pi’s camera connector.
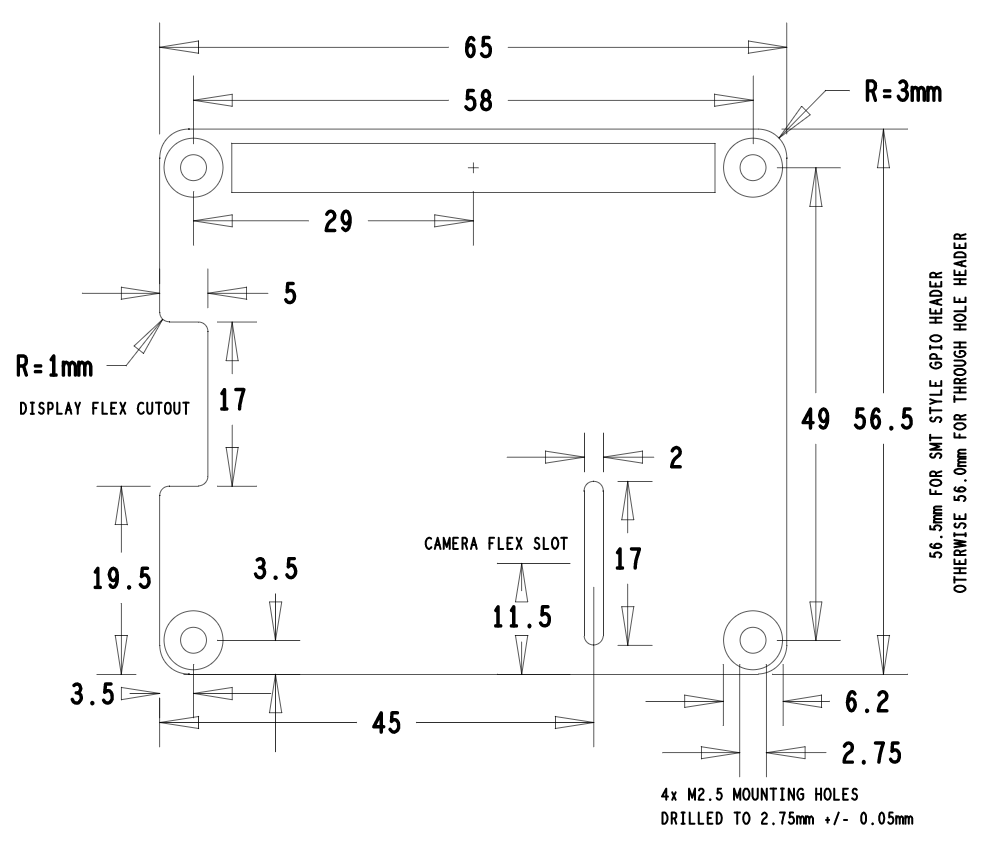 |
Raspberry Pi HAT mechanical specification drawing. |
|---|
Combined with the cutout for the other flex connector, this space limitation means that it would be difficult—if not impossible—to make a VNH5019 motor driver expansion board for the Raspberry Pi that is not annoyingly obstructive. So we are excited that the G2 design, with its discrete MOSFET H-bridges, provided enough layout flexibility for us to create these high-power dual motor driver expansions without making such compromises. We hope that they will open up new possibilities for bigger and more powerful Raspberry Pi robots!
 |
Related products






Happy Halloween!
 |
Another Halloween means another batch of great costumes from the people at Pololu!
Highlights from this year include Jennifer’s impressively detailed Ghostbuster costume, complete with a “working” proton pack (well, at least the lights worked) built around some laser-cut parts…
 |
and Jon’s elaborate representation of the Cassini-Huygens spacecraft, which included an actual magnetometer on the tip of his boom and a buzzer to audibly indicate magnetic measurements.
 |
Did you use any Pololu products in your Halloween costume or decorations? We’d love to hear about it on our forum or in the comments below, and we might even feature it in a future blog post!
Have a Happy Halloween!
Beefy arms for Balboa balancing robot
 |
If you’re following Paul’s blog series about getting your Balboa robot balancing, you’ll probably want something to protect it when it falls. When I was working with my Balboa, I got a set of prototype arms that our mechanical engineers have been developing, but I felt they were missing a little something. So instead, I took a Beefy Arm Starter Kit from Thingiverse and used OpenSCAD to add adjustable mounting hubs to the arms. I printed two sets of arms with our RigidBot 3D printer and mounted them to the side rails on the Balboa chassis using 25 mm M3 screws and M3 nuts. They’ve been great for keeping obstacles and the floor at arm’s length from my electronics while I drove the robot around with an RC transmitter or through a Raspberry Pi web interface (example code coming soon!).
You can find these beefy arms for the Balboa on Thingiverse if you want to try 3D printing your own. The OpenSCAD script is also available there in case you want to customize your arms.
Related products

UM7-LT and UM7 orientation sensors now from Redshift Labs
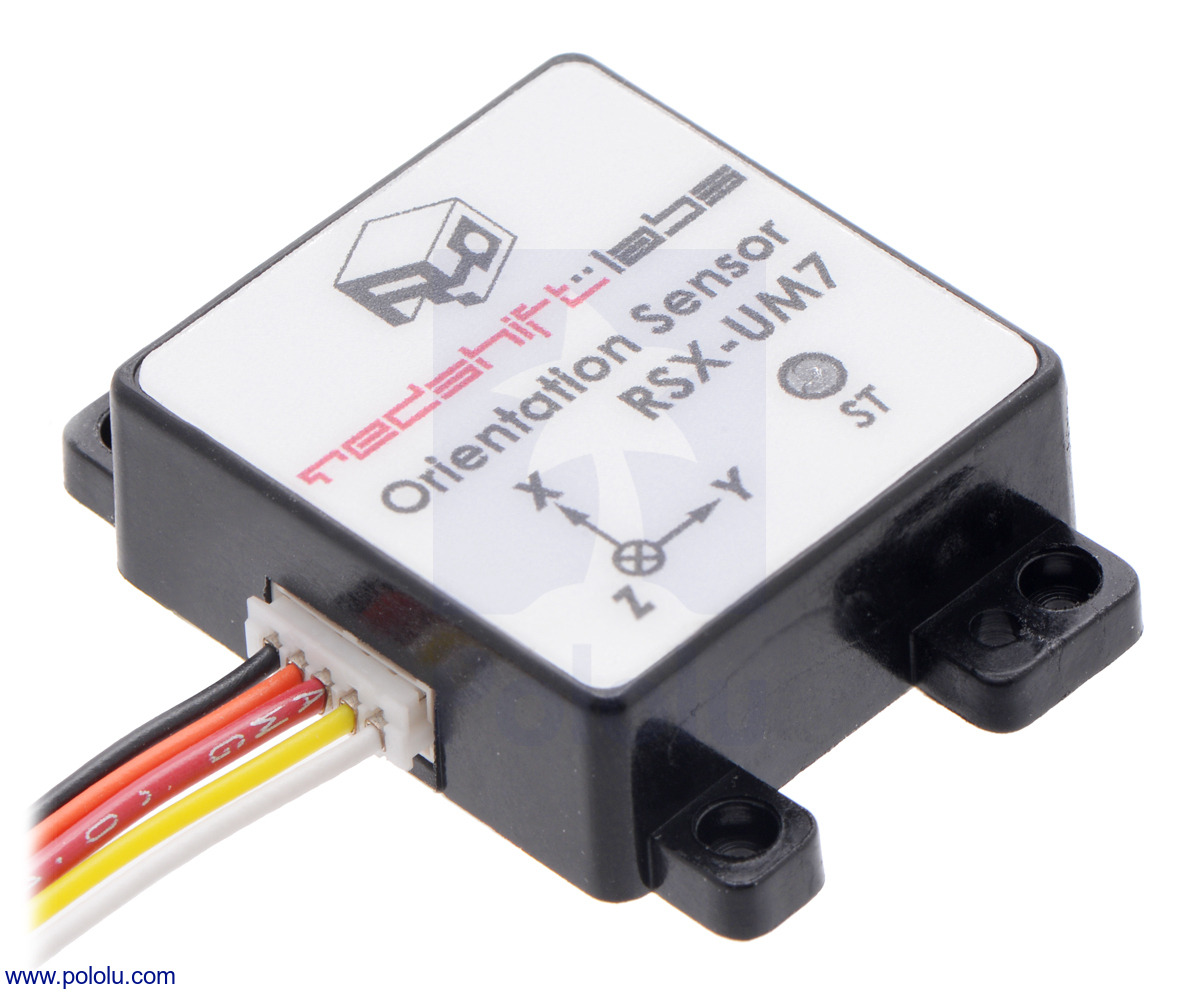 |
The UM7-LT and UM7 orientation sensors, originally developed by CH Robotics, are now being manufactured and supported by Redshift Labs. The updated versions of these sensors are now available from Pololu.
|
|
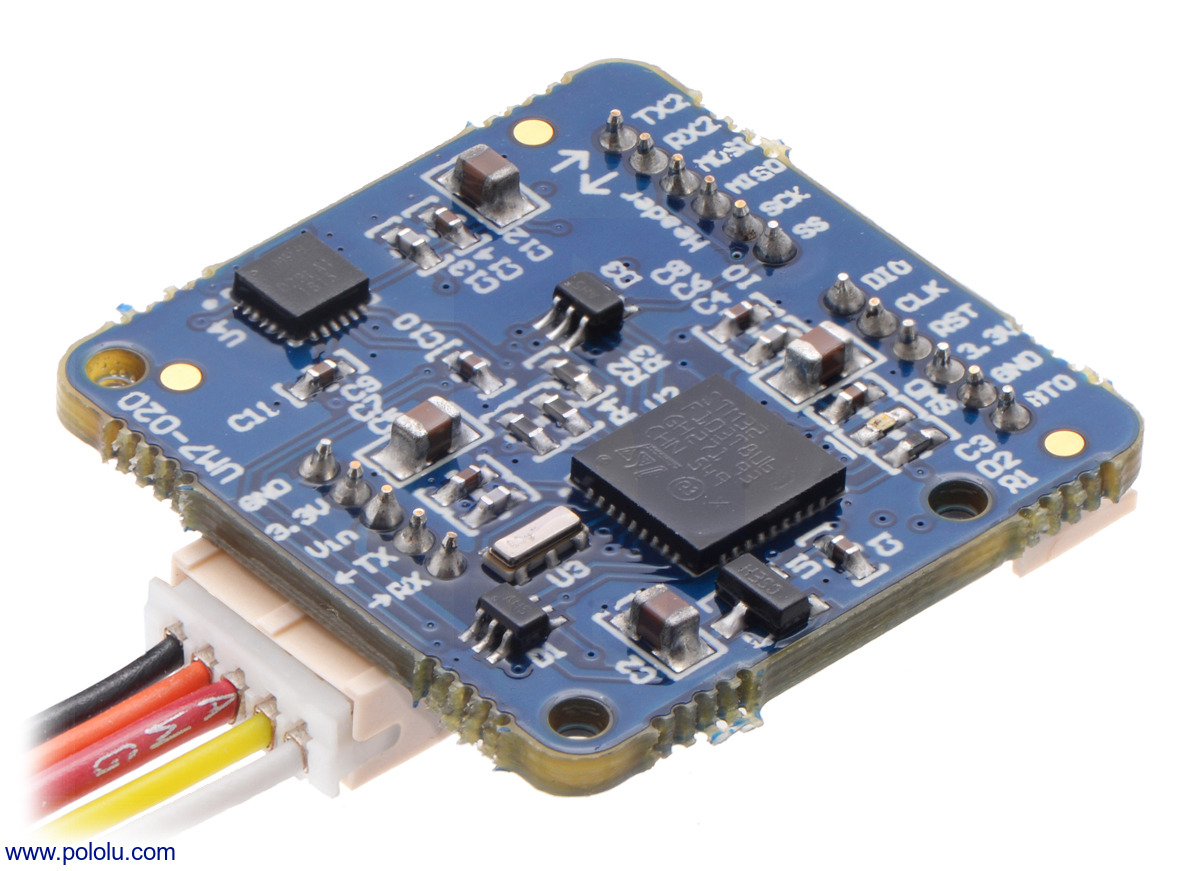

The UM7 is an Attitude and Heading Reference System (AHRS) that takes measurements from its three-axis accelerometer, gyro, and magnetometer and calculates orientation estimates with its integrated microcontroller. It is available with an enclosure as the UM7 or without one as the UM7-LT. Aside from a few updated components and the addition of a conformal coating on the UM7-LT, these sensors are functionally identical to the original versions produced by CH Robotics.
For more information about the orientation sensors, see their product pages below.
Related products


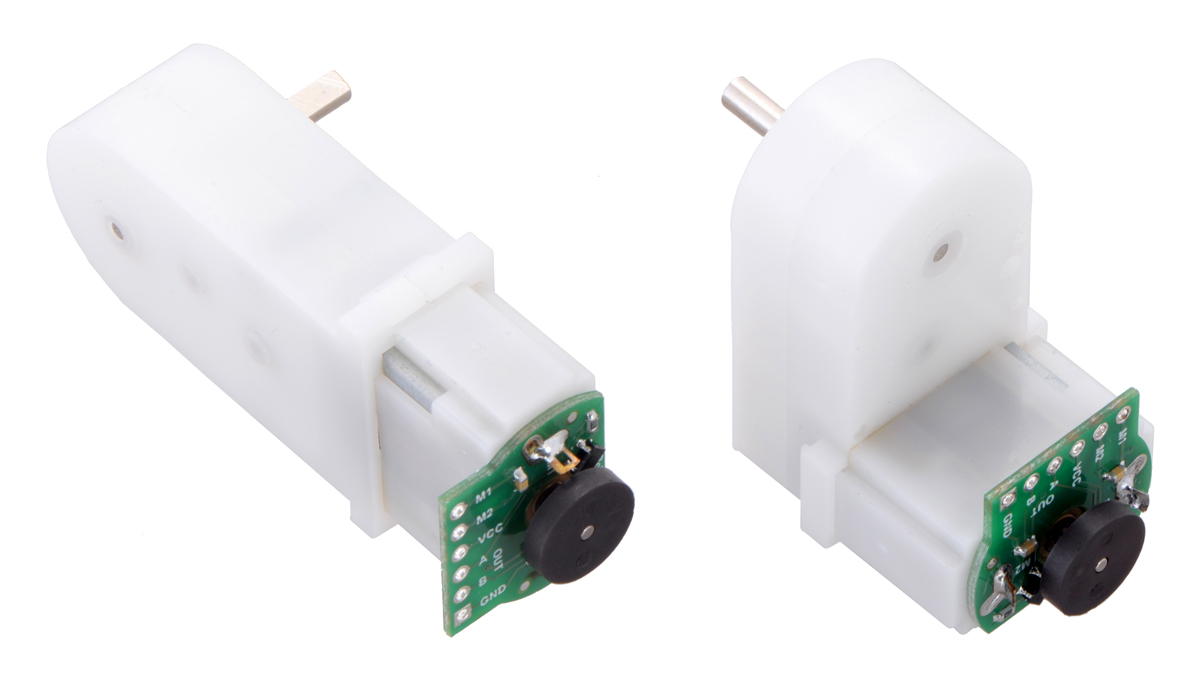
New product: Magnetic Encoder Pair Kit for Mini Plastic Gearmotors
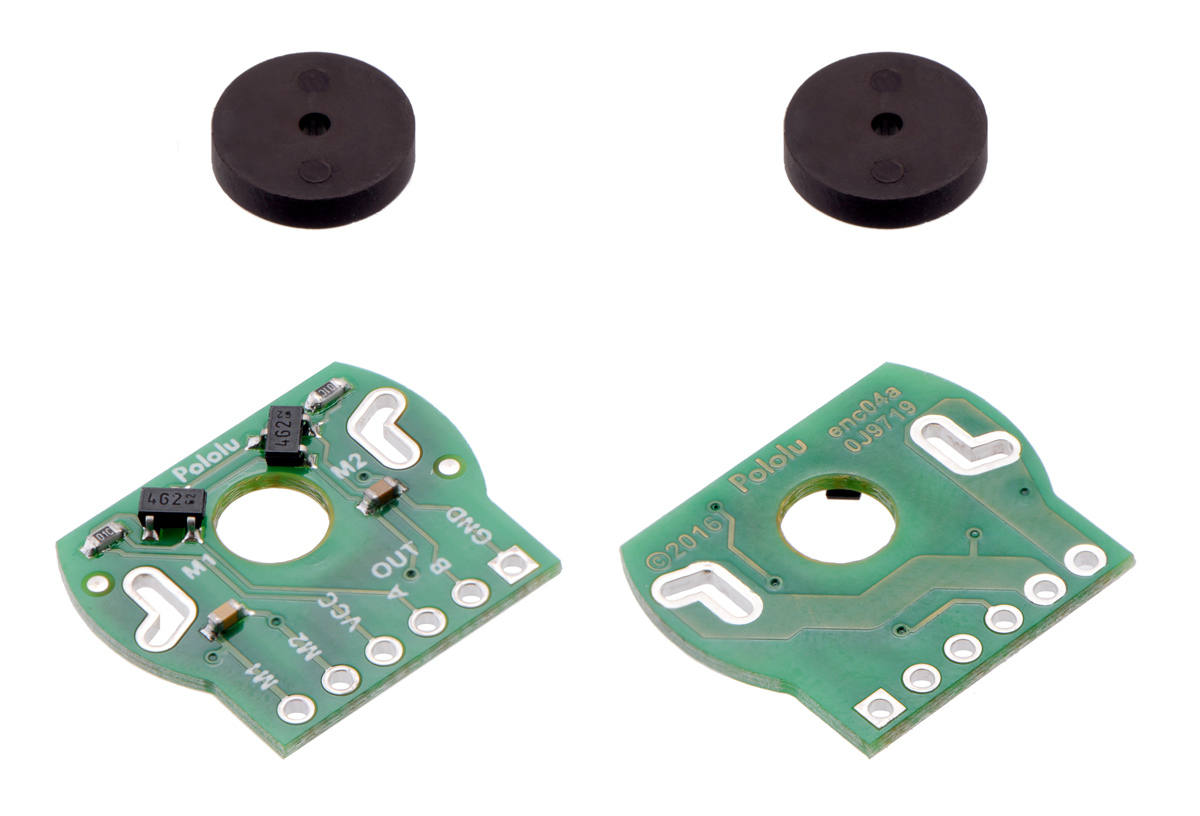 |
We now have a magnetic encoder pair kit available for our mini plastic gearmotors with extended back shafts. Like our encoder kit for micro metal gearmotors, these kits consist of Hall effect sensor boards that mount to the back of the motors and magnetic discs that fit on the motors’ back shafts. The encoders provide a resolution of 12 counts per revolution of the motor shaft (when counting both edges of both channels); in terms of counts per gearbox output shaft revolution, the resolution is multiplied by the corresponding gear ratio.
 |
For more details about the encoder kit, see the product page.
Related products





Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










