Pololu Blog »
Pololu Blog (Page 32)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Bionic hand
Customer Elise Pham made a bionic hand: a two-fingered gripper triggered with biofeedback. A Pololu Maestro servo controller monitors the trigger source and signals the servo to close the gripper. In this video, she uses a mechanical sensor for biofeedback, and she is exploring using a MyoWare Muscle Sensor as a future enhancement. Her earlier video shows using a MyoWare Muscle Sensor to control a servo like in our demonstration video.
April 10 update: Elise’s project won 1st Award for the 2017 Synopsys Science Fair and was also nominated to advance and compete in the 2017 National Broadcom MASTERS. Additionally, Elise was selected by the Santa Clara County Office of Education to participate in Steve Wozniak’s Silicon Valley Comic Con Science Fair.


Raspberry Pi line following with QTR-8RC and WiringPi
Customer Thomas Broughton made a line follower robot controlled by a Raspberry Pi that directly connects to a Pololu QTR-8RC reflectance sensor array. A Raspberry Pi is not typically good for a timing-sensitive application because it runs a regular computer operating system, so it’s nice to see Thomas was able to get it to reliably read the sensor array. The robot also uses four 42×19mm pololu wheels, a Pololu 5V Step-Up/Step-Down Voltage Regulator S18V20F5, and two Sharp distance sensors.
 |
His Python code and more discussion are in his blog post.
Related products



Packaging changes for better electrostatic discharge protection
Most of the products we manufacture are small electronics subassemblies, which we have been packaging in these pink antistatic bags that are probably familiar to everyone who has worked with electronics:
 |
These bags are supposed to help prevent charge buildup and therefore help prevent the sensitive components inside from getting damaged just from the bags being shuffled around. But, if you charge yourself up and then grab the bag, you can still zap the electronics inside through the bag.
This year, we began transitioning our packaging to metalized shielding bags, like this:
 |
These bags have the charge buildup prevention of the pink bags but also have a metal layer that prevent the spark from getting from your finger to the electronics parts in the bag. Most bags I have seen have some plastic coating outside the metal layer so that you don’t have zero resistance along the surface of the bag, but I have heard of people shorting things out by powering them up while sitting on some types of metallic bags.
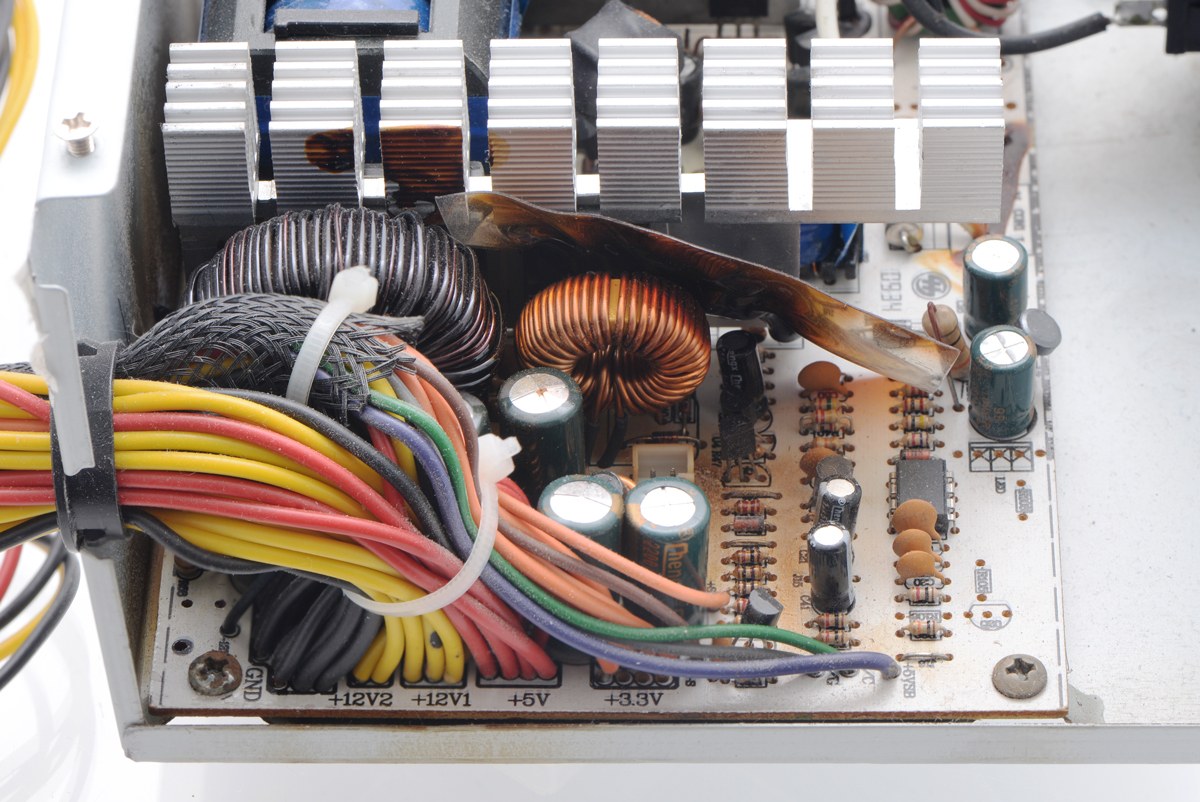 |
Did a static discharge into a USB port cause this power supply to go up in smoke? |
|---|
I once got a huge static shock when I plugged a flash drive into my USB port, and right after that, a bunch of sparks and smoke came out of my computer’s power supply. I’m pretty sure that wasn’t a coincidence, but I still can’t be sure it was a case of electrostatic discharge (ESD) destroying my computer. And usually, ESD damage is much more subtle and basically impossible for us to confirm. So, changing the packaging is one of those things where it will be very difficult to tell if it’s really doing anything. But we go through a lot of effort to inspect and test each item we make so that we can be confident it worked when we made it, so this packaging change should give us still more confidence that the part is in good condition when you receive it. It will take a while before all of our products get changed over, so don’t be shocked if your order arrives with a mix of packaging types.
Bartending robot
 |
Two Bit Circus is building a “micro-amusement park” in Los Angeles, and this robotic bartender will be one of the exhibits. It uses peristaltic pumps to load libations into hand-held shakers, mixes the drinks, and dispenses them. The animatronic motions of the robot are orchestrated by a Maestro servo controller and a Raspberry Pi.
More pictures and details can be found in the Make magazine article featuring the robot.
Related products

New #2 and #4 screw lengths
 |





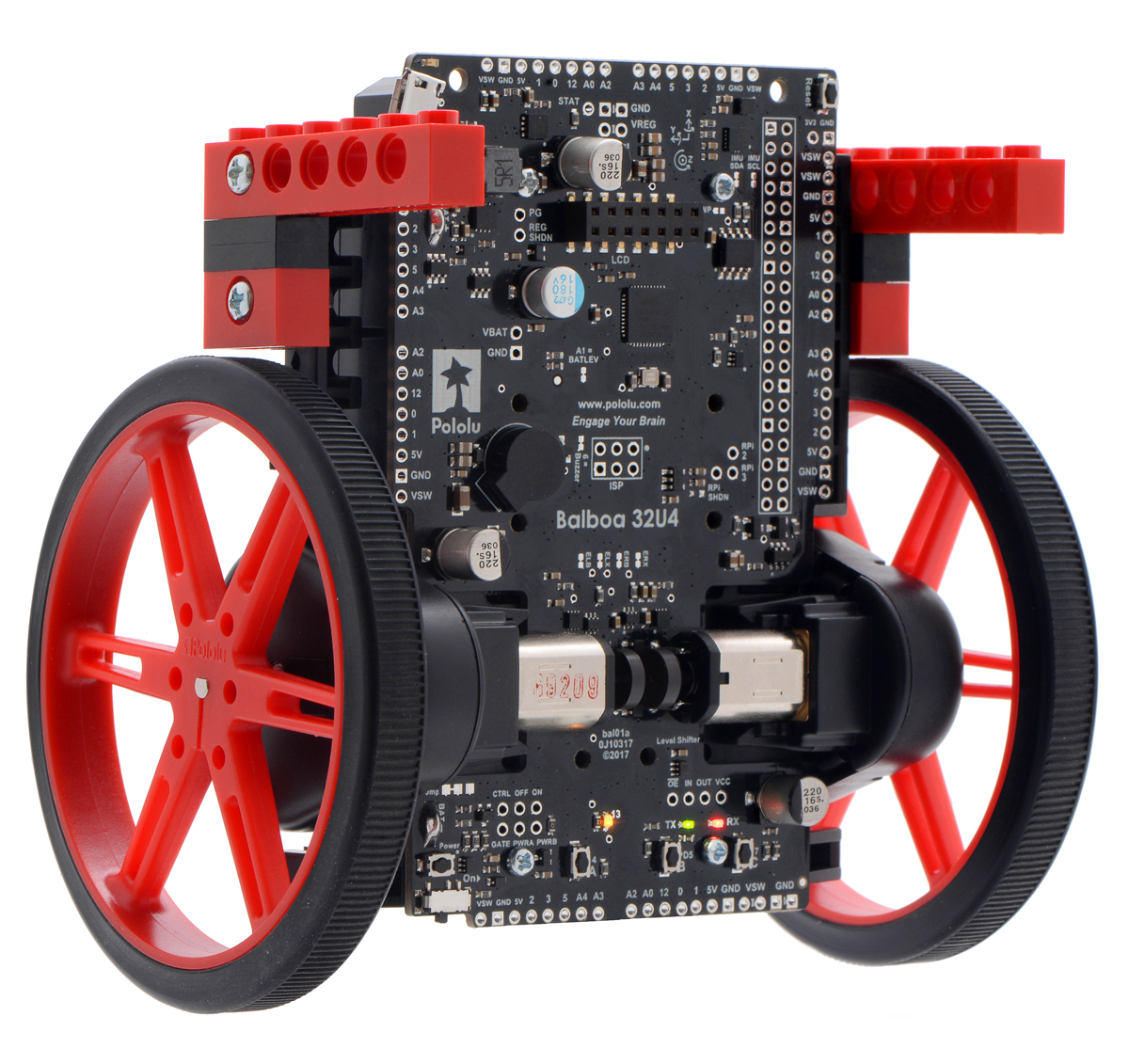
How to make a Balboa robot balance, part 1: selecting mechanical parts

This is the first post in a series about how to make a Balboa 32U4 robot balance. Today I will talk about selecting mechanical parts for your Balboa. We offer a variety of gearmotors and wheels that work with the Balboa, and the Balboa kit includes five different gear ratios for the external gearbox, so even without considering non-standard modifications, there are many possible configurations of the robot. In this post I will give you some guidance about choosing the right parts. Continued…
Zumo 32U4s with CMUcam5 Pixy
Customer Carlos Ambrozak developed an “Introduction to Robotics” course that includes a lab where students work on visual object tracking. The example project is two Zumo 32U4 robots playing cat and mouse. One Zumo has a large blue ball on it and drives around avoiding obstacles. The other has a CMUcam5 Pixy on a pan-tilt mount that looks for the blue ball and follows the other robot. The Zumo 32U4 controls the camera via I2C. The lesson’s provided source code is available on GitHub.
Related products

Free magazines: December, January, February, and March Circuit Cellars
|
|
|
|

Get FREE copies of Circuit Cellar magazine’s December 2016, January 2017, February 2017, and March 2017 issues with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT1216, CIRCUIT0117, CIRCUIT0217, and CIRCUIT031716 to your shopping cart, or click those links. Each magazine will add 6 ounces to your order weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers.
New M3 screw lengths
 |
We added some new M3 screw lengths to our catalog: 6 mm, 10 mm, 12 mm, 14 mm, 16 mm, and 20 mm. (We already had 5 mm, 8 mm, 25 mm screws, and M3 nuts.) Along with the general usefulness of a large selection of hardware, this greater variety of available lengths will help make it easier to mount accessories to your new Balboa 32U4 balancing robot’s M3-compatible mounting points.
|
|

Related products











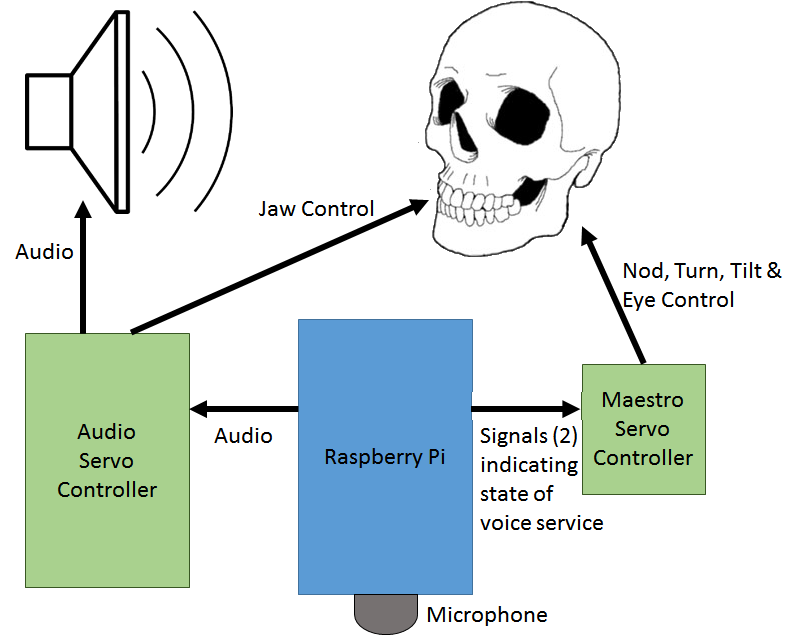
Talking skull uses Amazon Alexa
Customer Mike McGurrin made this animatronic talking skull that uses Amazon Alexa for interactive voice control. The central part of the project is a Lindberg 3-axis animatronic skull and audio servo controller, which makes the jaw movements follow the audio voice. In this project, the nod, turn, tilt, and eye movements of the skull are controlled by a 12-channel Maestro servo controller running a custom Maestro script that uses one of the channels as an input that is triggered by the Raspberry Pi. The Amazon Alexa integration is handled by AlexaPi.
 |
More details including a parts list and the Maestro Script are available on the project page.



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










