Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 8)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: SparkFun Inventor's Kit - V3 (with RedBoard)
 |
The SparkFun Inventor’s Kit has everything you need to construct a variety of circuits that will teach you how to use an Arduino-compatible RedBoard to read sensors, display information on an LCD, drive motors, and more. No previous programming or electronics experience is necessary, which makes this a great way for beginners to get started with embedded systems. The V3 version includes a RedBoard and detailed instructions for building 15 educational circuits with the kit components.
This replaces the older SparkFun Inventor’s Kit for Arduino with Retail Case.
For more information about the SparkFun Inventor’s Kit, see the product page.
ServoScribe Setup and Tutorial
In this video, Brian Patton demonstrates how to program an animatronic robot using a Maestro Servo Controller. He covers basic configuration using the Maestro Control Center and shows how to sync voice with servo motion using software from his company Robodyssey.
Featured link: http://www.youtube.com/watch?v=Yop9Zk2HJMU
Free Elektor magazine September 2013
 |
Get a FREE copy of Elektor magazine’s September issue with your order while supplies last. This offer is only available for orders shipped to USA or Canada. To get your free issue, enter the coupon code ELEKTOR0913 into your shopping cart. The magazine will add 6 ounces to the package weight when calculating your shipping options.
For other issues and more information, see our Free Elektor Magazine Offers page.
Pololu Wixel with SD Card as USB Mass Storage Device
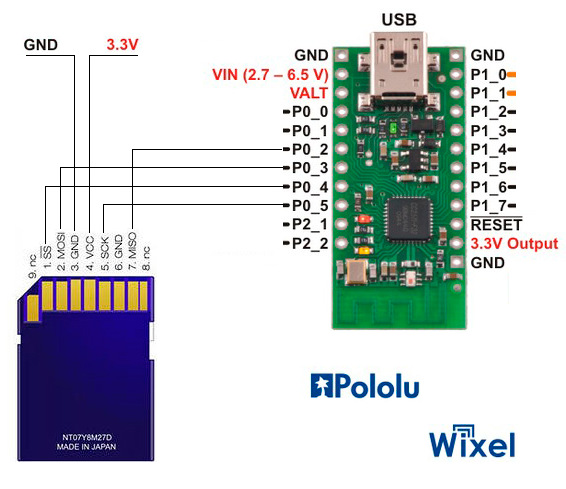 |
Pololu Forum user VolAnd, writing from St. Petersburg, Russia, posted about an app that turns a Wixel into a USB SD card reader. The Wixel identifies itself as a mass storage device, and basic read/write operations are working. His goal is to create files with the Wixel that he can then read from a PC. You can read more or get the app from his forum post.
This Wixel app and many others are available in our listing of community-contributed apps on the forum.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7143
Welcome to the Pololu Blog!
 |
We released our new company blog to the public this week. The Pololu Blog is the main place to find news and announcements about Pololu including new products, price changes and sales, community projects, video releases, and more.
Pololu president Jan Malášek’s blog, Engage Your Brain, which used to occupy this part of the site, is also now part of the Pololu Blog.
Still can’t get enough Pololu? You can also follow us on Facebook, Twitter, and Google+, or subscribe to our YouTube channel.
Lunokhod
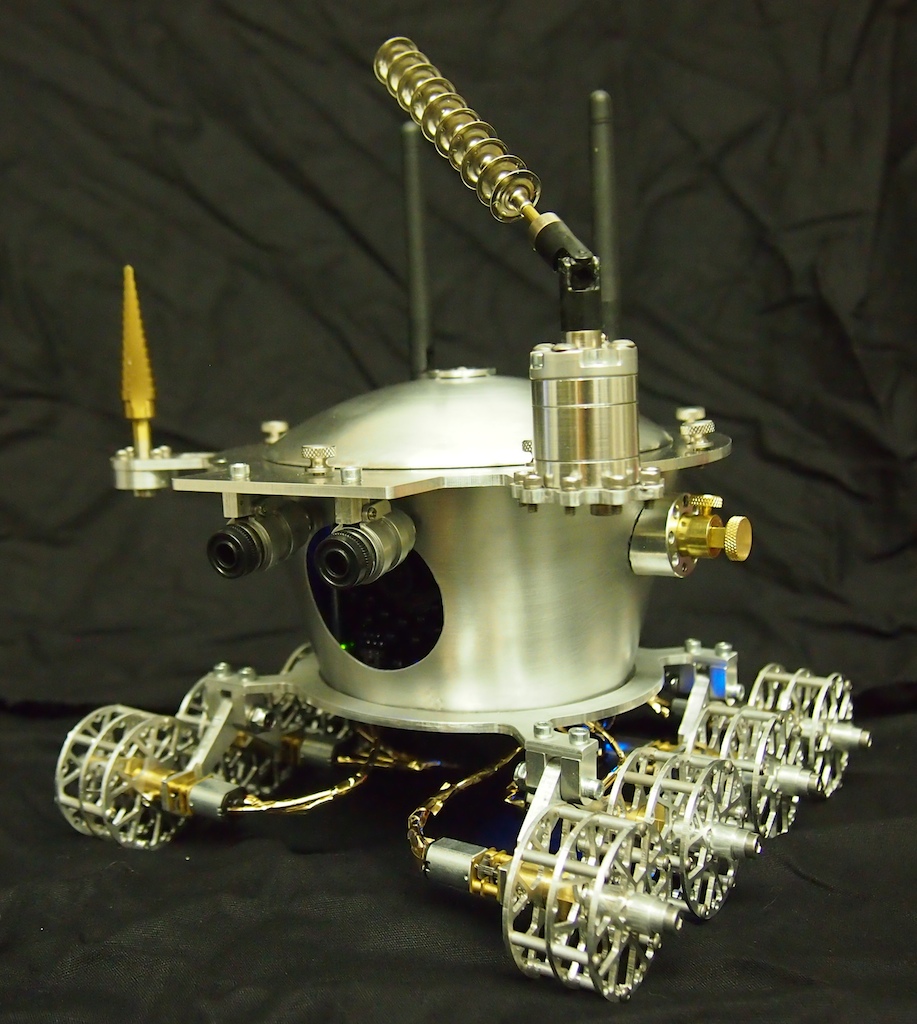 |
Lunokhod, which means “Moon Walker” in Russian, was built for a space museum in Prague and is a miniature version of the first remote-controlled moon rover. It uses 8 of our 298:1 micro metal gearmotors and an Arduino Nano and can be remotely controlled by museum visitors. The rover was built by Beatty Robotics; you are can learn more about it on their blog.
Simple 18-servo hexapod
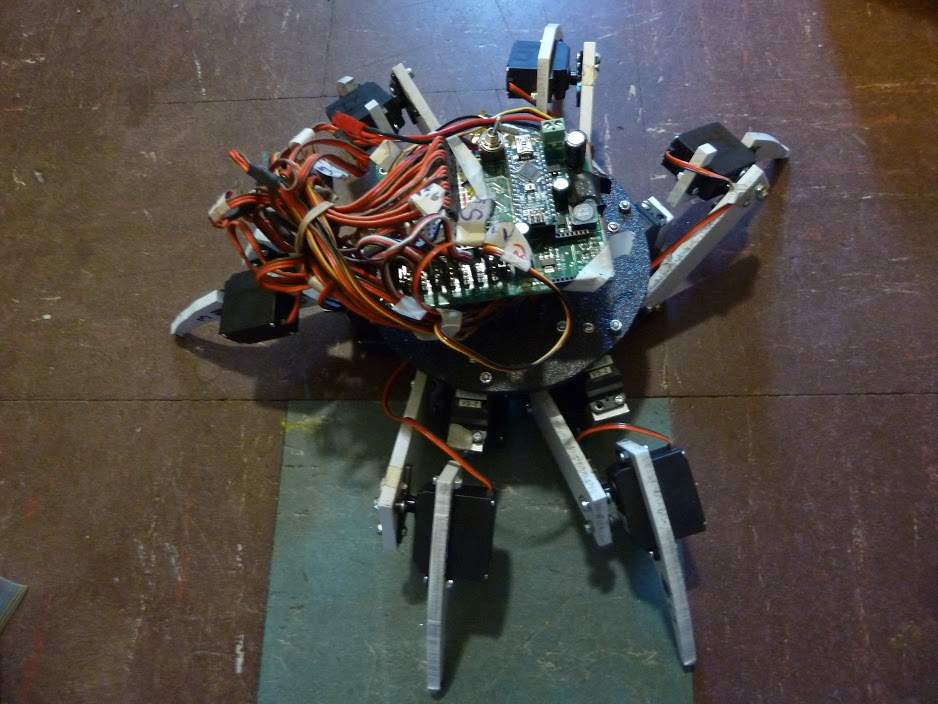 |
This instructable shows how to make a simple 18-servo hexapod robot that uses either just an Arduino or an Arduino and a Maestro to control its servos.
Featured link: http://www.instructables.com/id/Simple-18dof-Hexapod-Arduino-nano-optionally-wit/
Flight Testing of a Surrogate UAV at the National Test Pilot School
 |
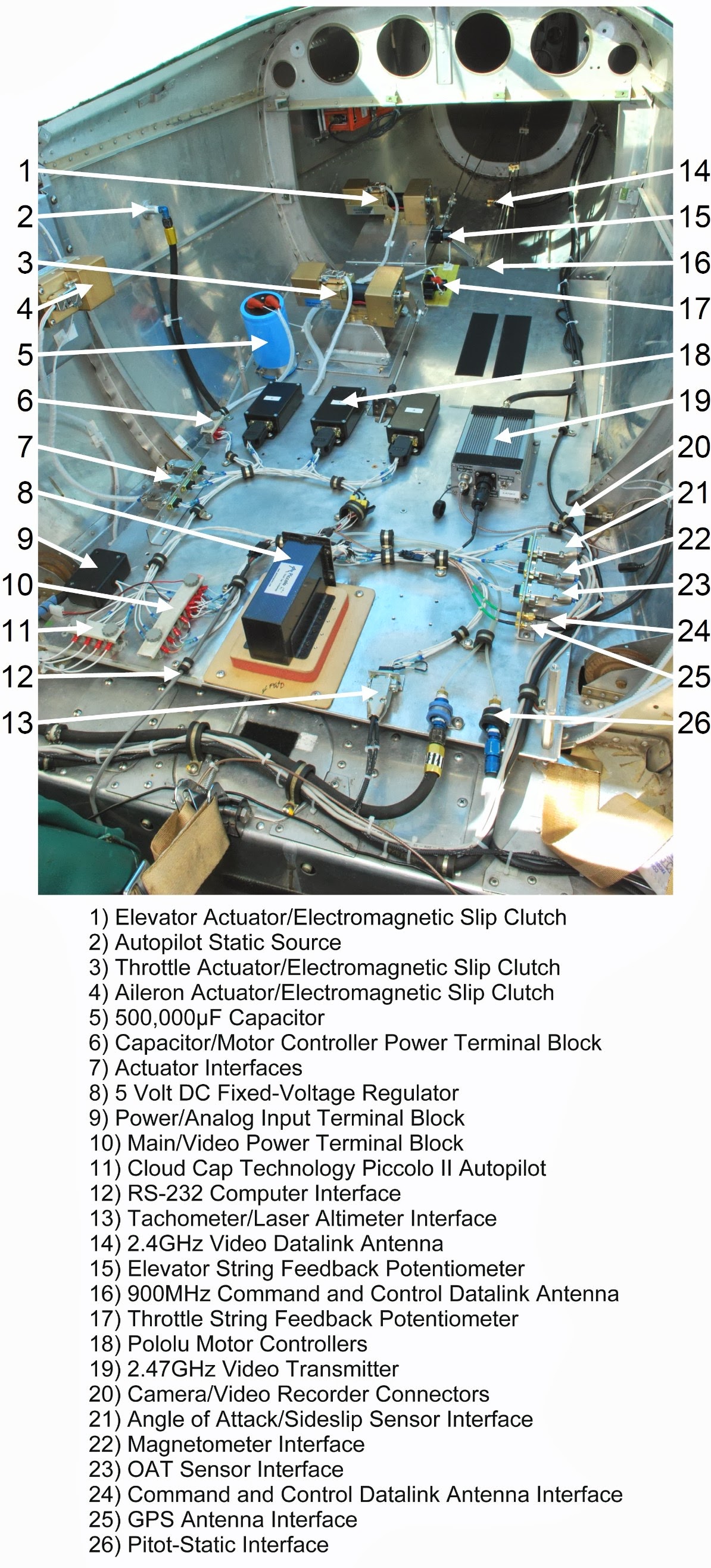
This “optionally piloted aircraft” is a Cessna 150 that customer Ryan Olson fitted with an autopilot and remote control system using the Pololu jrk 12v12. It is used for UAV training and development at the National Test Pilot School in Mojave, CA. Ryan’s AUVSI 2012 abstract is available online, and you can see some pictures of the internals below.
|
|

Related products

RK-1 robot
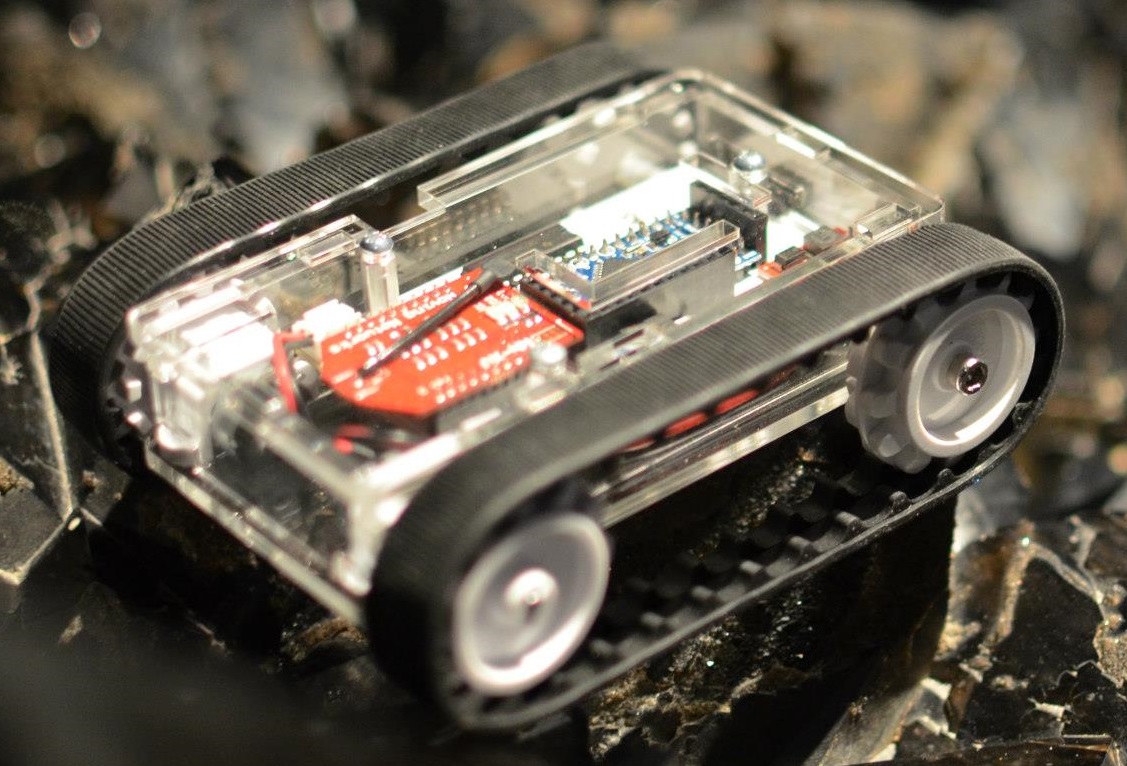 |
This successful kickstarter project is a wifi-enabled robot that is controlled through an iOS or Android app. It uses an Arduino, Pololu track set, and micro metal gearmotors.
Featured link: http://mymobilerobots.com/rk1/
Bluetooth interface for a chronograph
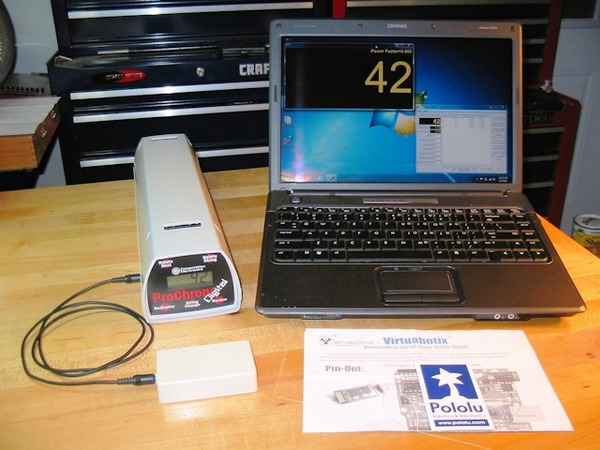 |
This Bluetooth interface to the serial output of a chronograph uses Pololu’s NCP1402 voltage regulator.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7040


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










