Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 9)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Digital Capabilities: a digital garden
 |
This digital garden by the University of Lincoln uses a Raspberry Pi, 20 jrks, and linear actuators to move panels, revealing the plants behind them, in response to tweets. More information is available on the project’s website. The project was awarded a gold medal at London’s Chelsea Flower Show.
Featured link: http://www.youtube.com/watch?v=DWdqyHa6mnI
Pocket-sized USB charger adapter
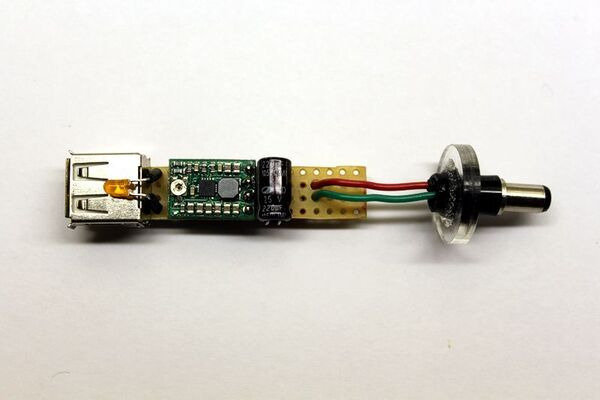 |
This Instructable shows how to make a professional-looking power adapter for charging USB devices using a Pololu Adjustable Step-Up/Step-Down Voltage Regulator S7V8A.
Featured link: http://www.instructables.com/id/Pocket-Sized-POLOLU-5V-Output-as-POWERTUBEs-acces/
Geeky wedding
 |
This couple wanted an engineering-themed wedding, so they used e-textiles for their attire! The project used some Pololu voltage regulators.
Featured link: http://www.billporter.info/2013/04/22/our-geeky-wedding-electronic-wedding-attire/
BumbleBee Autonomous Underwater Vehicle
 |
Congratulations to Team BumbleBee on winning 2nd place in the 2013 Singapore AUV competition! Their autonomous underwater vehicle uses a High-Power Motor Controller 18v15.
Featured link: http://bbauv.com/bumblebee-placed-2nd-in-singapore-autonomous-underwater-vehicle-2013/
Wixel breakout board for servos
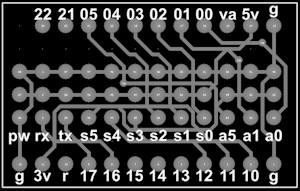 |
This board by Martin Sant makes connecting servos to the Wixel easier.
Featured link: http://martinsant.net/?page_id=962
Replacement motor for the NERF Stryfe
 |
We recently heard that the Solarbotics RM2 is being used as a replacement motor for upgrading flywheel NERF blasters. In this discussion on the NerfHaven Forums, forum member 0reo says:
IMHO, these are the best motors for any flywheel nerf gun that runs on 4 AAs.
Featured link: http://nerfhaven.com/forums/index.php?showtopic=23611
Related products


Pinoccio demo using 3pi: Web Rover
 |
This demo project for the Pinoccio wireless microcontroller combines a Pololu 3pi with a Pinoccio to create a rover that can be driven remotely over the internet.
Featured link: http://pinocc.io/examples/webrover/
Veter Robot
 |
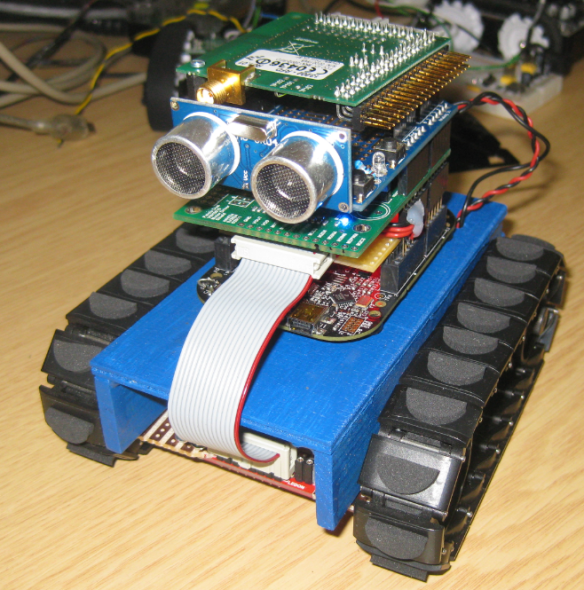
This nice-looking autonomous robot uses a Dagu Rover 5 Tracked Chassis. The Veter Robot was designed to be used as a robotics research platform. The creators list many advantages of their platform:
In the hardware area we provide:
- Longer autonomous operation time with easy replaceable battery.
- Significantly higher processing power with onboard ARM CPU and advanced TI DSP.
- Easy customizable 3D-printed body for integration of additional sensors and actuators.
- Simple electronic built out of standard high level components.
- Wide range of out-of-the-box sensors.
In the software area we provide:
- Advanced communication infrastructure for cloud robotics.
- Support for multiple programming languages.
- Adaptive video streaming for remote operation over the Internet.
- Set of examples for education scenarios.
By embracing open software and hardware paradigm we and our customers have access to vibrant and large community of developers and designers. By shifting complexity to the software and simplifying hardware we were able to reduce price to very competitive level.
For technical details, demo videos, and purchasing information, see the project web site.
Featured link: http://veterobot.com/
Carambola Rover
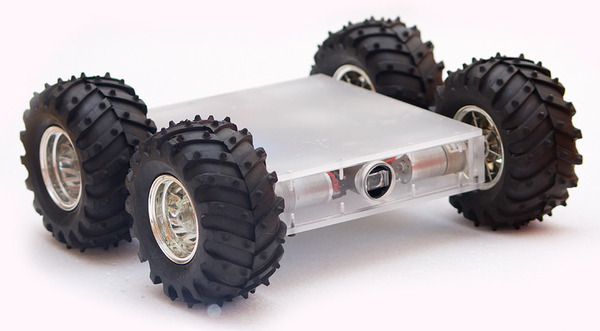 |
This rover by Saulius Lukse contains a Pololu Qik 2s12v10 dual serial motor controller and Dagu Wild Thumper wheels. It uses a Carambola wireless Linux module as its controller and can be controlled from an Android phone or tablet.
Featured link: http://lukse.lt/uzrasai/2013-01-carambola-powered-robot-v2/


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









