Mechanical Components » Chassis » Pololu 5″ Robot Chassis RRC04A »
Pololu 5" Robot Chassis RRC04A Solid Black

This chassis base plate is a round piece of 1/8" (3 mm) acrylic with a 5" (127 mm) diameter and cutouts for building a differential-drive robot chassis based on our micro metal gearmotors and 42×19mm wheels. The chassis has assorted general-purpose holes and slots that support many configurations of sensors and other robot components.
Alternatives available with variations in these parameter(s): color Select variant…

| Description | Specs (1) | Pictures (21) | Resources (0) | FAQs (0) | On the blog (1) | Distributors (0) |
|---|
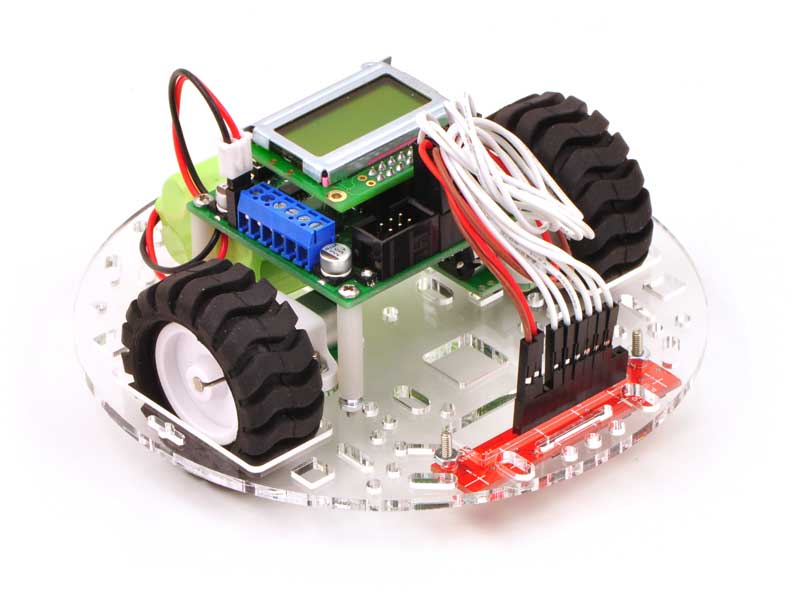 |
Pololu 5" round robot chassis RRC04A with an Orangutan SV-328 and a QTR sensor array. |
|---|
Overview
The 5" robot chassis RRC04A is an 1/8" acrylic chassis that provides a base for our micro metal gearmotors, extended brackets, and 42×19mm wheels. The robot chassis has many mounting holes that let you mount a variety of robot components to it. With a diameter of only five inches, this acrylic chassis is great for building robots capable of navigating tight spaces.
The RRC04A robot chassis is available in a variety of colored (and clear) acrylics:
- solid red
- solid black
- solid blue
- solid white
- solid light-blue
- transparent clear
- transparent gray
- transparent light-blue
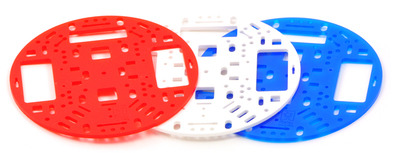 |
The Pololu 5" robot chassis RRC04A is available in a variety of colors. |
|---|
 |
Required Components (not included)
- Two Pololu micro metal gearmotors (30:1 through 210:1 gear ratios are usually reasonable).
- One Pololu micro metal gearmotor bracket pair, one 42×19mm wheel pair. (Encoders are optional; you can get them with the wheels and brackets in the wheel and encoder set.)
- One of
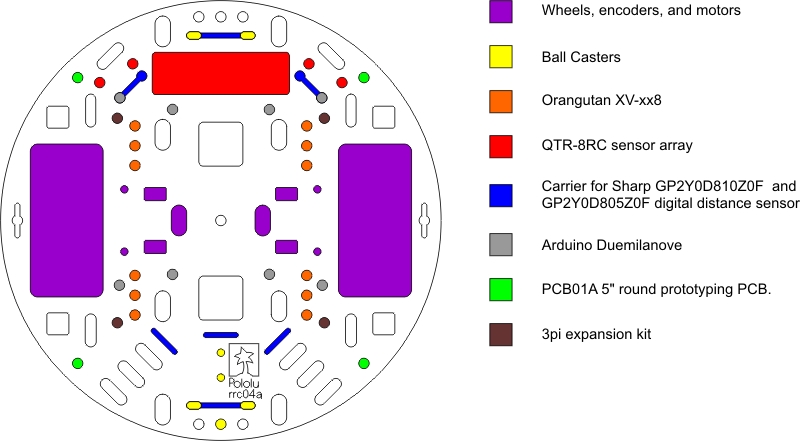 |
Pololu 5" round robot chassis RRC04A mounting locations. |
|---|
Note: Note that the 1000:1 micro metal gearmotors have longer gearboxes than the other gear ratios and will only work with this chassis if you modify it to have larger wheel wells, though gearmotors like this are generally poor choices for robotic propulsion (unless your goal is to make an agonizingly slow snail robot).
Some Compatible Components
- The Orangutan SV-328 robot controller, Orangutan SV-168 robot controller, and Orangutan LV-168 robot controller with six different mounting options.
- The Arduino Duemilanove controller board with four different mounting options.
- The QTR-8RC reflectance sensor array (both six and eight sensor options) with four different mounting options.
- The Pololu carrier with Sharp GP2Y0D810Z0F digital distance sensor 10cm with eight different mouting locations.
- The 3pi expansion kits.
- The PCB01A 5" round prototyping PCB.
You might find our premium jumper cables helpful in connecting various components.
Included Spacers
The laser-cut chassis is designed to work with the Pololu encoders. If you do not use the encoders, you can use the two included spacers that keep the chassis at the same height. The spacers are cut out of 1/16" clear acrylic.
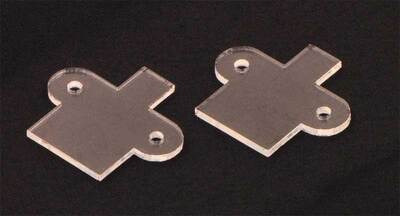 |
Pololu 5" round robot chassis RRC04A includes two spacers. |
|---|
 |
Using the chassis
The motors can be mounted on either side of the chassis (top or bottom). With the motors mounted on the bottom, the chassis will be roughly 1" from the ground, and you can use the Pololu 1" ball caster as a third point of contact with the floor. With the motors mounted on the top, the chassis will be a roughly 0.4" from the ground, making the Pololu 3/8" ball caster with the included 1/16" spacer the best fit.
There are many different ways to connect the compatible components to the chassis. You can refer to the diagram showing where compatible components can be mounted for further information about where you might mount various components. Some configurations require standoffs. You can see additional pictures of examples in the pictures tab.
 |
Pololu 5" round robot chassis RRC04A with an Arduino Duemilanove and a Sharp digital distance sensor. |
|---|
Related products



















Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
