Pololu Blog » User Profile: Jon »
Posts by Jon
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: more Silicone Tires for Pololu wheels!
 |
Silicone Tire Pair for 40×7mm (left) and 32×7mm (right) Pololu Wheels. |
|---|
We are now offering replacement tires for our 32×7mm wheels and for our 40×7mm wheels. These are intended primarily as replacement parts for our wheels, but they can also be used as nicer tires for other similarly sized wheels.
|
|
|


Along with the tires we released last month for our larger Pololu wheels, we now have replacement tires available in four sizes that can stretch to work with six different sizes of Pololu wheels:
 |
From left to right: Silicone Tire for 32×7mm, 40×7mm, 60×8mm/70×8mm, and 80×10mm/90×10mm Pololu Wheels. |
|---|
Related products


Tito-Stretch: a Pi Wars robot by Hitchin Hackspace
For the second year in a row, Team Hitchin Hackspace and their robot, Tito-Stretch, placed 4th overall in the Pi Wars! They did this at the Advanced/Pro level, which is Pi Wars’ most challenging competition category. (In case you haven’t heard already: Pi Wars is an international robotics competition that focuses on Raspberry Pi-controlled robots.) The video above features Tito-stretch high-tailing it through the obstacle course event. The team’s speedy performance allowed them to climb to the very top of their division, which is a step above their 2nd place finish in 2018’s obstacle course event.
Tito-Stretch is the latest iteration of the hackspace’s competition robot, which has evolved in name and form over the last few years. As we understand it, the team named the original version of their robot Twenty Two Over Seven (22/7 is one way to approximate pi), abbreviated that to TTOS, and then affectionately transitioned to calling the robot “Tito”. Later, the team lengthened their robot and accordingly appended “-Stretch” to the name.
|
|

 |
Tito-Stretch on gravel. |
|---|
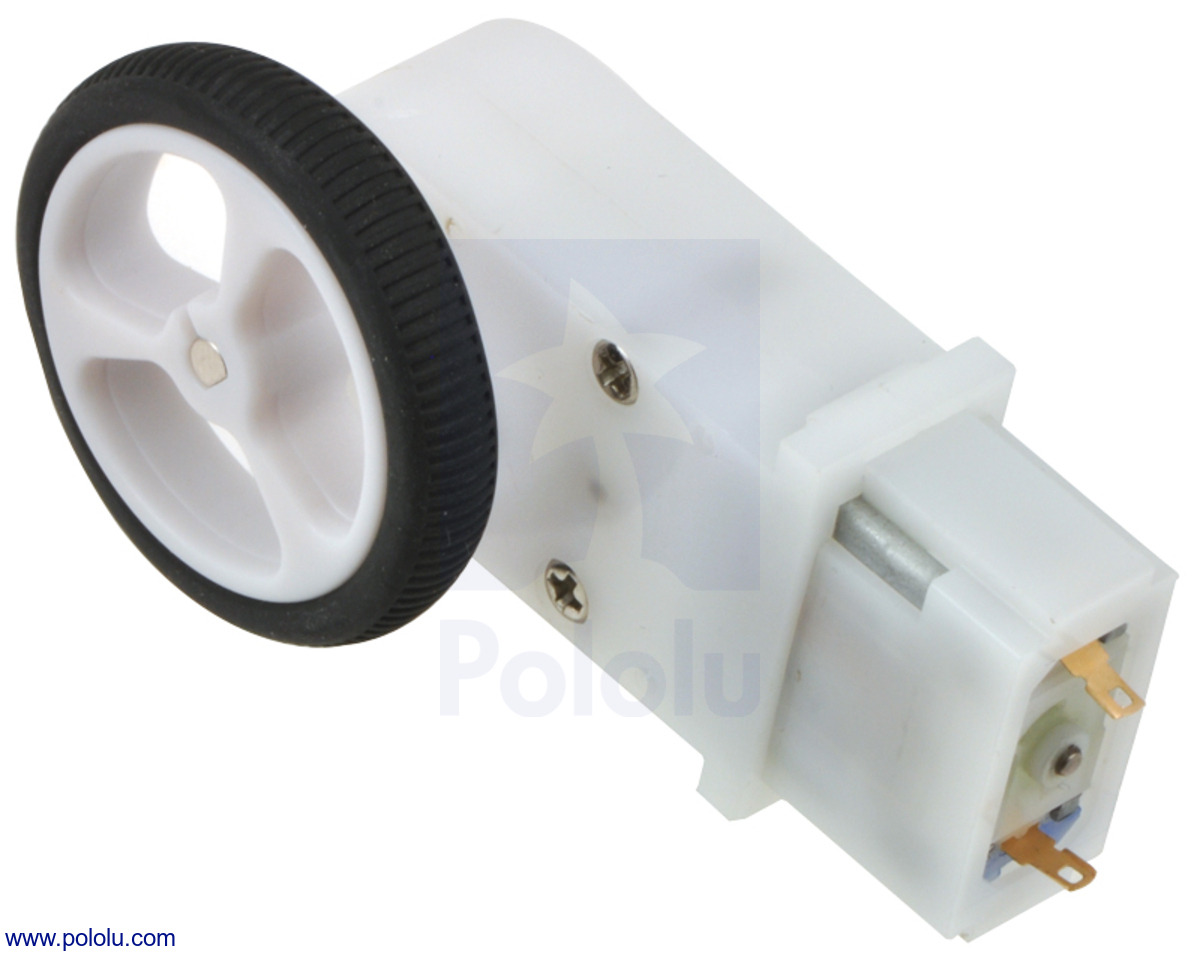
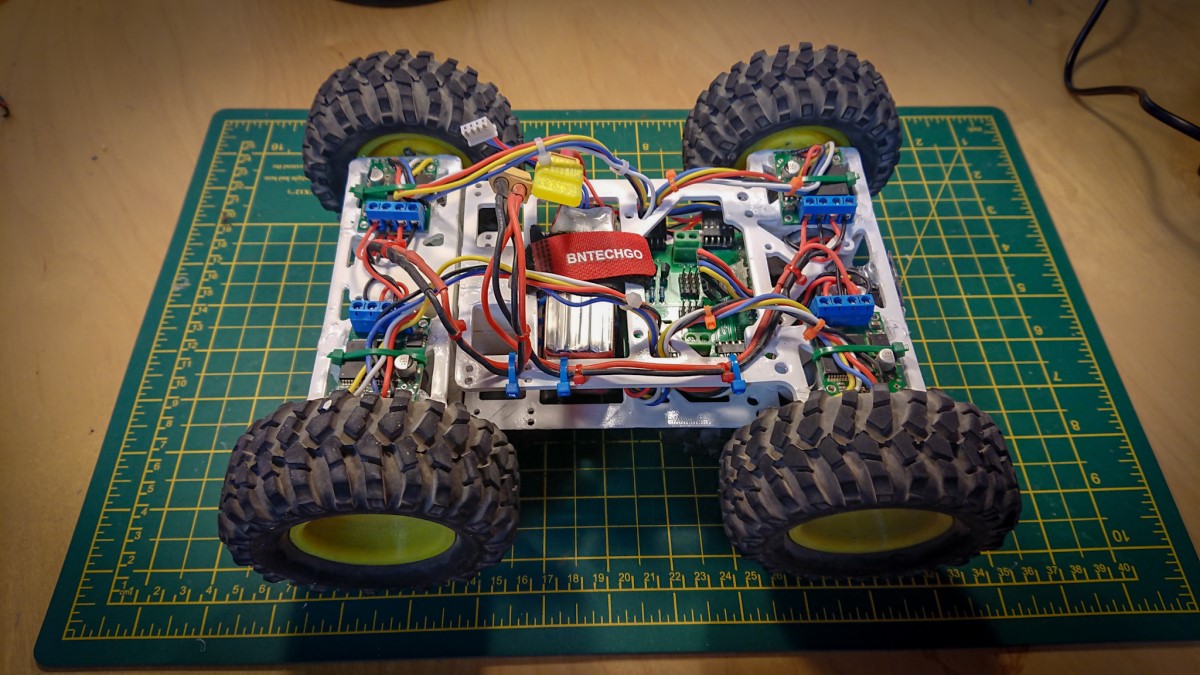
The Tito-Stretch chassis is a 3D-printed design that uses a pair of skateboard bearings in a way that decouples the front and rear parts of the chassis, allowing each part to roll independent of the other. This passive articulation allows the robot to more consistently maintain all four wheels as solid points of contact on uneven terrain. When assembled, the chassis parts clamp down onto four 12V 25D mm gearmotors, and a VNH5019 motor driver controls each motor. A 5V regulator steps down the voltage of a 3S LiPo and powers a Raspberry Pi 3 Model A+, which is the brain of the operation. The team can remotely control their robot with Bluetooth controllers (they currently use a PS4 controller, but have used other devices in the past), and various accessories like a few VL53L0X time of flight distance sensors help enable autonomous navigation. You can find code for Tito-Stretch, and older versions of Hitchin Hackspace’s Pi Wars robots, on their GitHub page.
Great job on your competition this year, Hitchin Hackspace! We hope to hear more about your robots in the future!
Related products




New product: Silicone Tires for Pololu wheels
 |
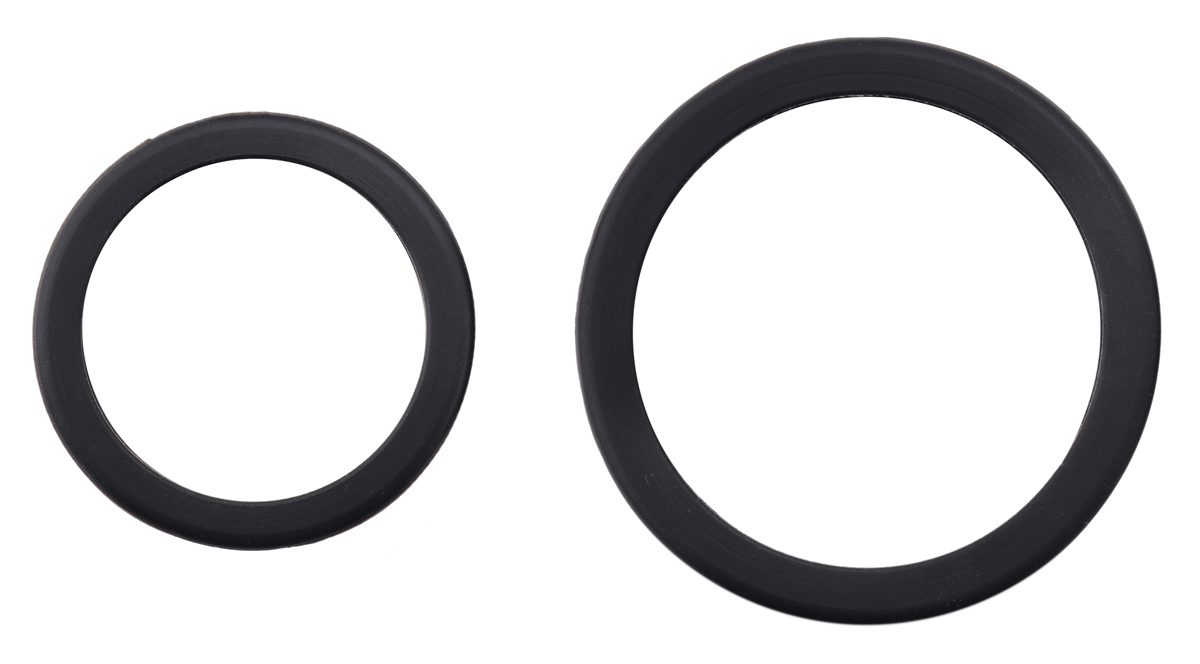
Silicone Tire Pair for 80×10mm/90×10mm (left) and 60×8mm/70×8mm (right) Pololu Wheels. |
|---|
We have recently had several requests for just the tires from our largest Pololu wheels, so here they are! The silicone tires are available in two sizes, with the smaller tire working with our 60×8mm and 70×8mm wheels and the larger tire working with our 80×10mm and 90×10mm wheels. The tires are intended primarily as replacement parts for our wheels, but they can also be used as nicer tires for other similarly sized wheels, such as the 2-5/8″ plastic wheels for Futaba servos.
 |
|
|
|



Related products


New product: DB15 Screw Terminal Adapter for MCP23X/26X Advanced Motor Controllers
|
|


We are now carrying a DB15 Screw Terminal Adapter for MCP23X/26X Advanced Motor Controllers. The adapter breaks out connections from the DB15 connector to a set of screw terminals, making accessing those pins easier during prototyping. It is designed specifically to work with the MCP Advanced Motor Controllers that feature a DB15 connector: the MCP233, MCP236, MCP263, and MCP266. However, it could also be used as a generic breakout board for other hardware that uses the same connector, like old computer joysticks or MIDI devices (where it is called a game port).
Related products





Kinetic art installation using 24 Maestros to control 576 servos
 |
This wall-mounted kinetic art installation by Alain Haerri redirects light from 576 independently actuated square panels. A flattened segment of an aluminum can, cut to the same square shape as the panel, decorates each actuator, and a small servo allows the decorated panel to pivot up or down. The servo’s positioning of the panel can alter how much light is reflected, effectively making that individual panel appear lighter or darker. Taken together, the array of panels produces an image with enough resolution and speed for delightful and mesmerizing visuals.
At the heart of the operation is an Arduino Mega, which, with the help of our Maestro Arduino library, communicates with 24 Mini Maestros (with 24 channels each) to orchestrate the movement of servos. The Mini Maestros are wired together and connected to a single software serial port on the Mega, which controls all the Maestros using the Pololu protocol at 200 kilobaud. Additionally, the installation has a built-in camera, which allows it to do things like mirror the movement of people standing in front of it, as this video shows:
You can find a write-up of Alain’s project on the Arduino Project Hub, where he also shares his code, a complete parts list, and a couple more videos of the table in motion.


New product: Case with Fan for RoboClaw 2x15, 2x30, and 2x45
|
|


With this new RoboClaw case, our selection of RoboClaw products just got even cooler – literally! In addition to protecting the motor controller, this case also has an integrated fan, which will allow an enclosed RoboClaw to deliver higher continuous currents and sustain peak currents longer. The case works with 2x15A, 2x30A, 2x45A, and ST 2x45A RoboClaw motor controllers and features cutouts for accessing the motor outputs and the various control input header pins.
Related products



Video of Caesar, the first-place rover of the 2019 Indian Rover Challenge
The first-place winner of the 2019 Indian Rover Challenge, Team Anveshak from IIT Madras, sent us a link that shows their rover in action! The video is their submission to the 2019 University Rover Challenge (URC) System Acceptance Review (SAR), which is a major qualification round for participating in the URC finals. Good luck with SAR qualifications, Team Anveshak!
We first blogged about Team Anveshak’s rover back in January. For more information on the rover and the competition, including pictures, check out that post!
Macro photography using Tic stepper motor controllers
|
|

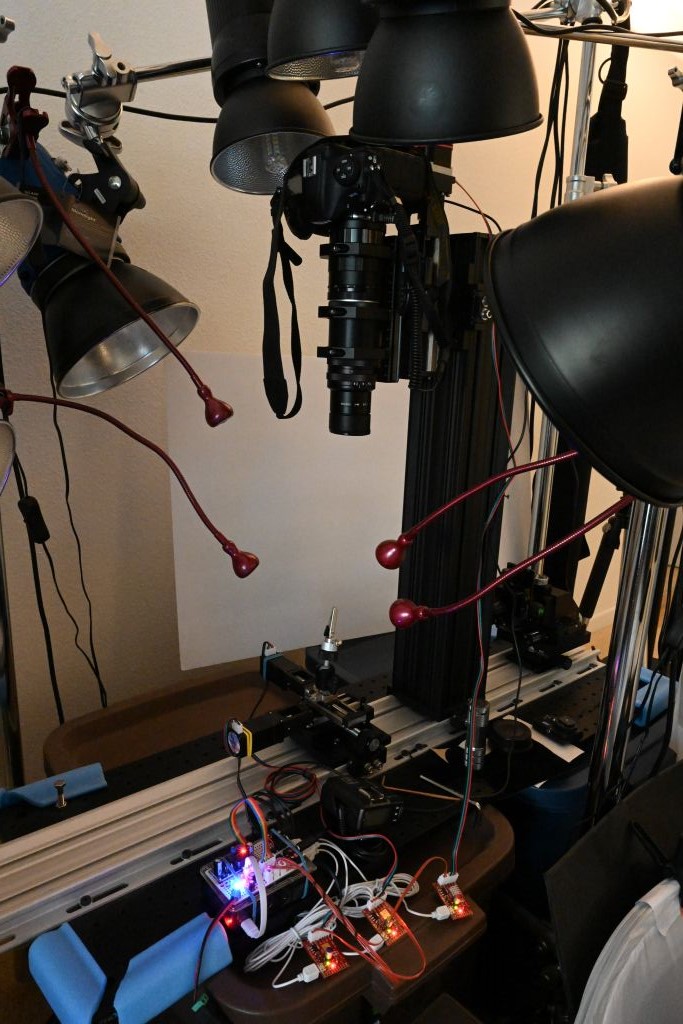
Forum member Mike is using our Tic stepper motor controllers in his automated stack & stitch image acquisition systems, which he has been using to get extremely high resolution images of various integrated circuits. Each system uses linear rails and stepper motors to properly align the camera/lens and the object to be photographed. Two stepper motors position the subject and a third adjusts how close the camera is to the subject. A Tic T500 controls each stepper motor and each Tic connects to a USB port on a Raspberry Pi 3B or Raspberry Pi 3B+, which acts as the main computer. Afterward, Mike stacks the images with Zerene Stacker and stitches them together with Photoshop. Some of his image sessions capture as many as 6000 individual images that are used to produce a single 300 megapixel image!
 |
Zooming in on a stack & stitch test image. |
|---|
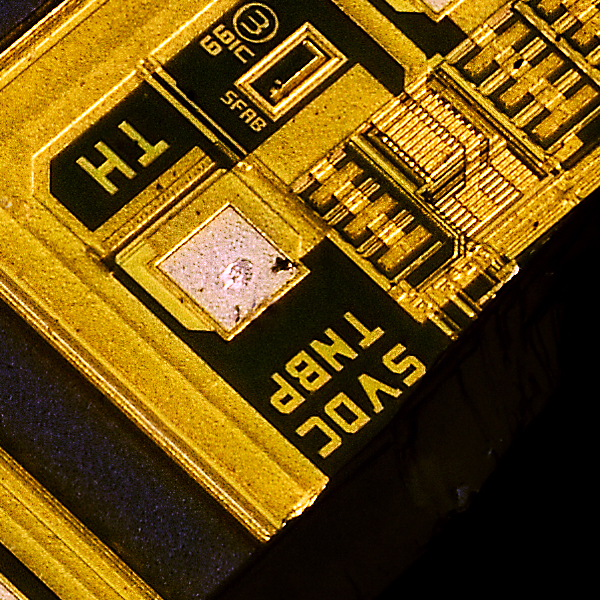 |
A close-up view of a stack & stitch test image. |
|---|
You can find more information about Mike’s stack & stitch image acquisition systems (like what specific mechanical hardware he is using) in this forum post. Also, to see and/or download a set of high resolution pictures taken with those setups, follow this link.


Rover team from IIT Madras places first in Indian Rover Challenge
 |
Congratulations to Team Anveshak from IIT Madras, who took first place at the 2019 Indian Rover Challenge! The IRC is a robotics and space exploration-based competition for college students. Participating teams design and build a Martian rover prototype and use that rover to compete in various tasks like obtaining soil samples, operating electrical racks, and picking up and delivering objects.
|
|

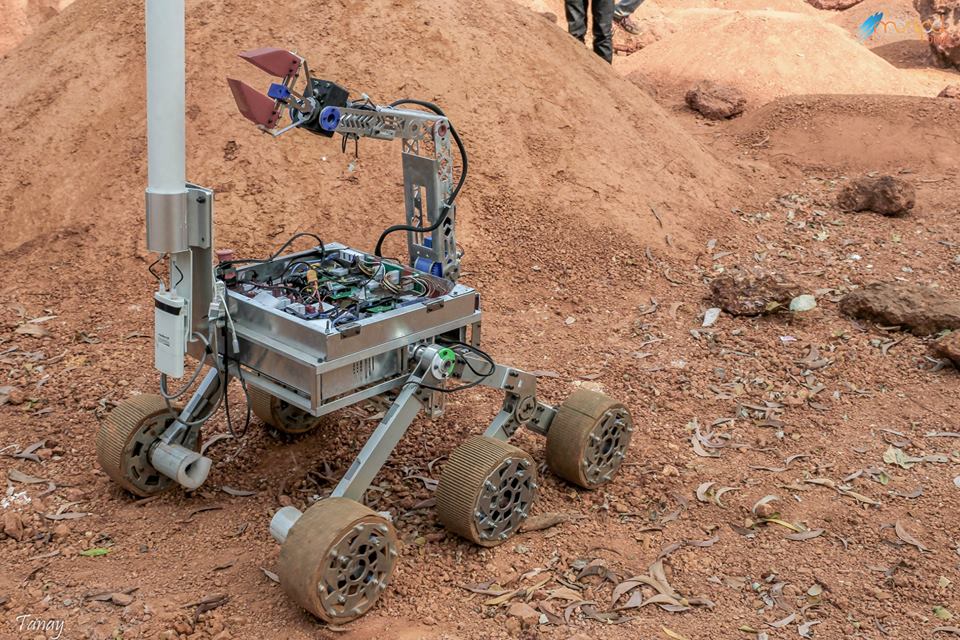
Team Anveshak’s winning rover, Caesar, uses 10 different Pololu products! We are especially excited to hear that their rover prominently features our newer G2 High-Power Motor Driver 24v13 and TB9051FTG motor drivers, using 9 of each of those boards.
We love seeing all the awesome things like this that people are doing with our products! For a more complete list of the Pololu parts used in Caesar, check out the related products listed below. If you want to learn more about the team, check out their website.
8 March 2019 Update: See a video of Caesar in action here.
Related products









Balboa controlled via cell phone over Bluetooth
Drew Wilkerson added a Robotis BT-410 Bluetooth-to-serial board to his Balboa Robot, which allows him to control that Balboa from a cell phone. You can watch the video above to see the Balboa being driven around as it balances. More information about this project, including the code running on Drew’s Balboa, can be found in his post on our forum.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










