UM6 Ultra-Miniature Orientation Sensor

The UM6 ultra-miniature orientation sensor from CH Robotics uses rate gyros, accelerometers, magnetic sensors, and an onboard 32-bit ARM Cortex processor to compute sensor orientation 500 times per second.
| Description | Specs (9) | Pictures (6) | Resources (9) | FAQs (0) | On the blog (0) | Distributors (0) |
|---|
File downloads
-
Datasheet for the CHR-UM6 orientation sensor (1MB pdf)
Document rev. 2.4, updated October 14, 2013 to add UART example code and additional SPI information.
-
Getting Started with the UM6 Orientation Sensor (675k pdf)
This application note provides instructions for communicating with, configuring, and calibrating the UM6 and UM6-LT orientation sensors from CH Robotics.
-
Understanding Euler Angles (255k pdf)
The UM6 and UM6-LT orientation sensors use Euler angle representations by default , and this application note from CH Robotics helps explain what Euler angles are.
-
Understanding Quaternions (57k pdf)
The UM6 and UM6-LT orientation sensors can represent orientation with quaternions, which avoid certain problems that can occur when using Euler angles. This application note from CH Robotics helps explain what quaternions are and how to use them.
-
Estimating Velocity and Position Using Accelerometers (43k pdf)
This application note describes how to use the UM6 or the UM6-LT to estimate velocity and position (dead-reckoning using accelerometers). It also explains why this estimate will not be accurate enough for most applications.
-
Sensors for Orientation Estimation (127k pdf)
The UM6 and UM6-LT orientation sensors each use a three-axis accelerometer, gyro, and magnetometer to estimate orientation. This application note explains in more detail the purpose of each sensor and the math involved in combining them.
-
Reprogramming the Firmware on the UM6 and the UM6-LT (243k pdf)
The UM6 and UM6-LT orientation sensors are designed to be easily reprogrammed when a firmware upgrade is needed. This application note provides a detailed description of how to reprogram both devices.
Recommended links
-
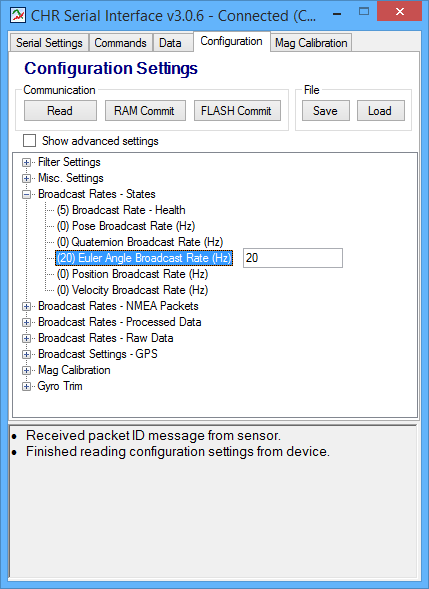
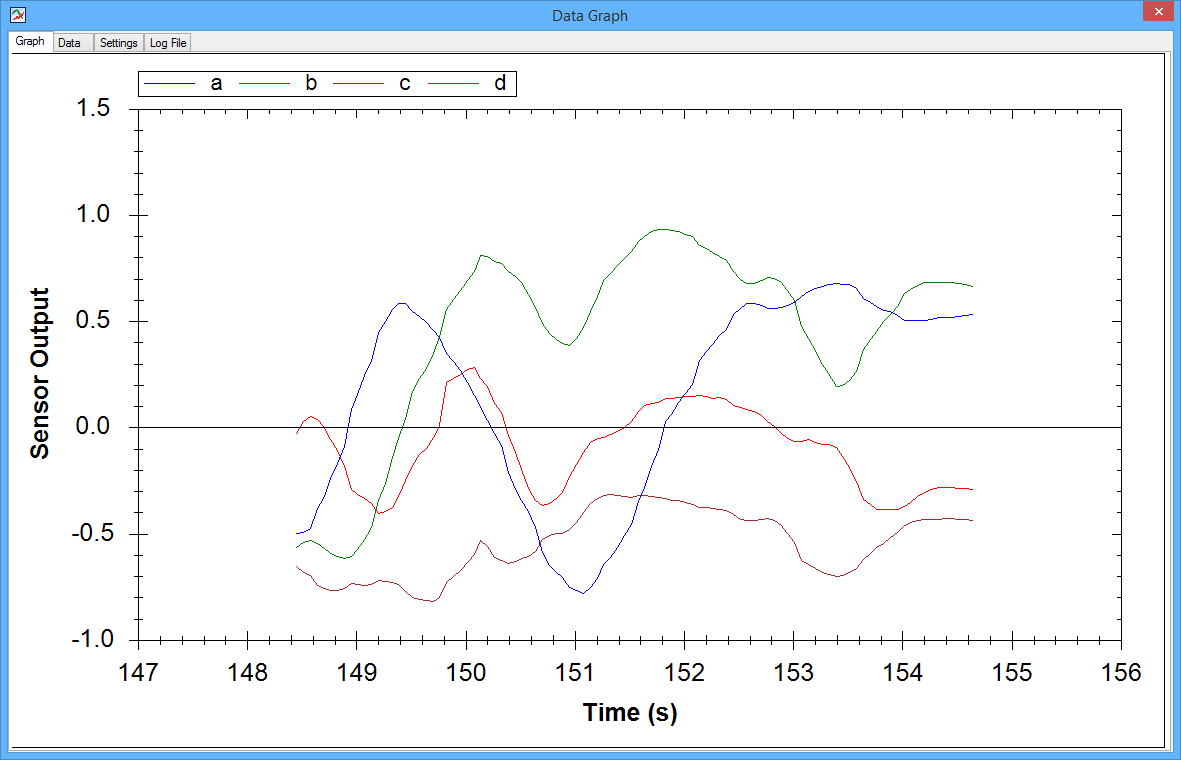
CH Robotics Serial Interface

CHR Serial Interface.
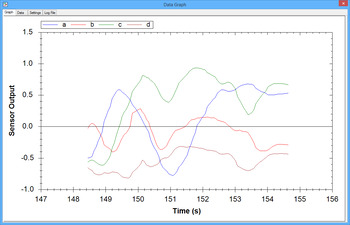
Graph of quaternions displayed by the CHR Serial Interface connected to a UM7/UM7-LT orientation sensor.
-
UM6 Orientation Sensor firmware
Related products











Related categories



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
