Support » Pololu Zumo 2040 User’s Guide »
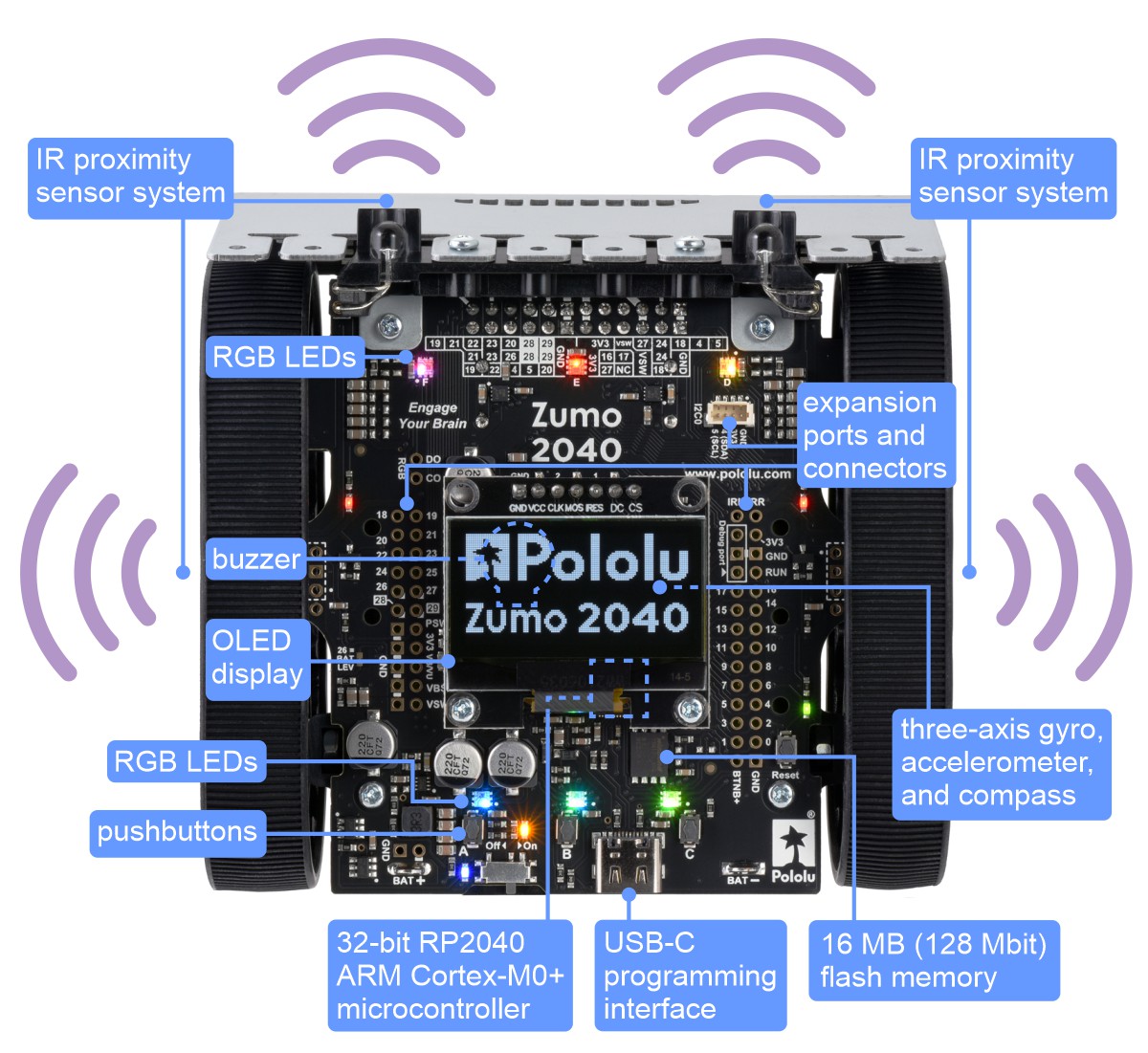
6. The Zumo 2040 in detail
- 6.1. Microcontroller
- 6.2. User interface
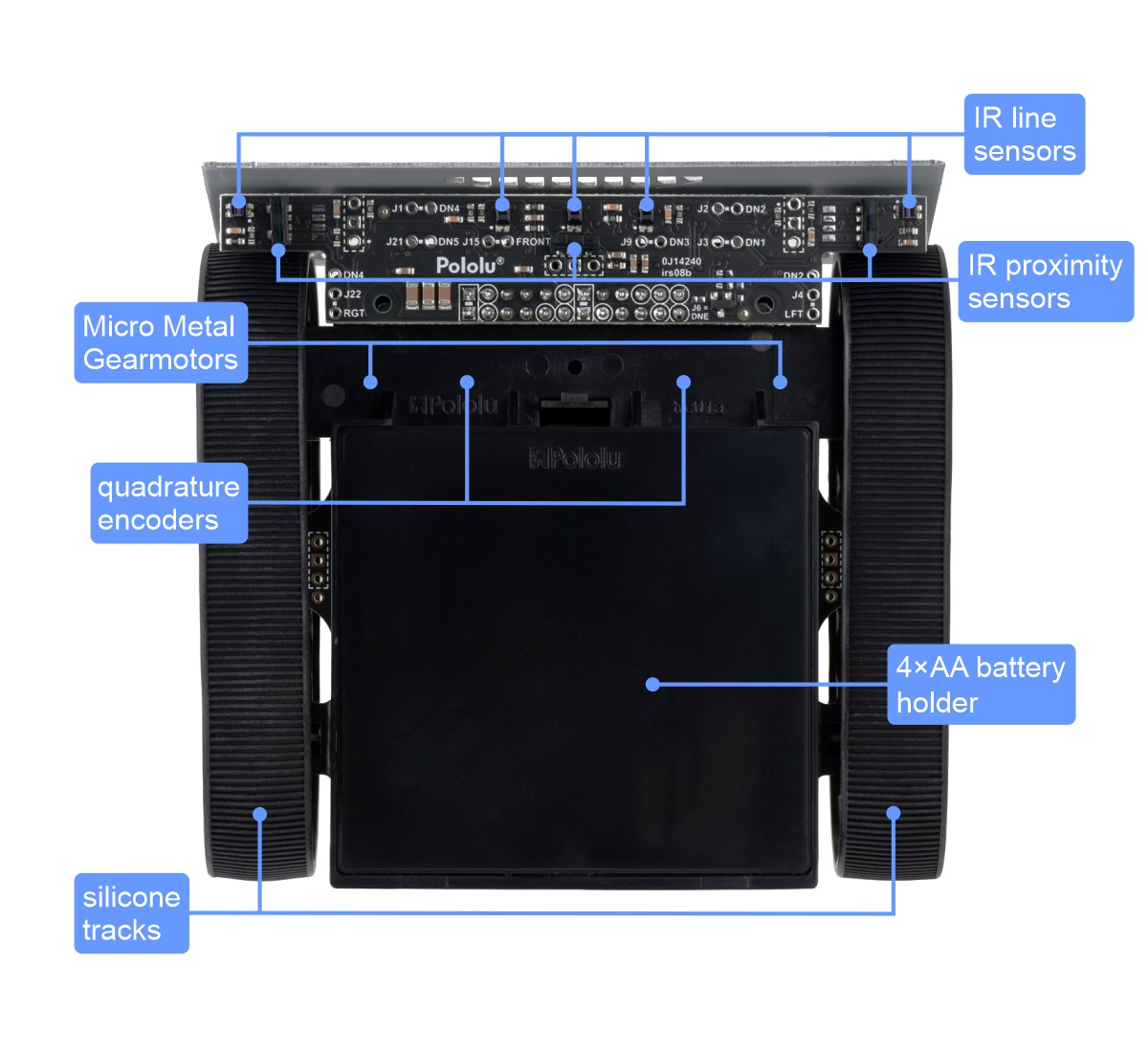
- 6.3. Motors
- 6.4. Quadrature encoders
- 6.5. Front sensor array (line and proximity sensors)
- 6.6. Proximity sensing
- 6.7. Inertial sensors
- 6.8. Power
- 6.9. Expansion headers and connectors
- 6.10. Pin assignments
- 6.11. Adding electronics
- 6.12. Schematics and dimensions
 |
 |






Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
