Pololu Blog »
New product: VL6180X Time-of-Flight Distance Sensor Carrier
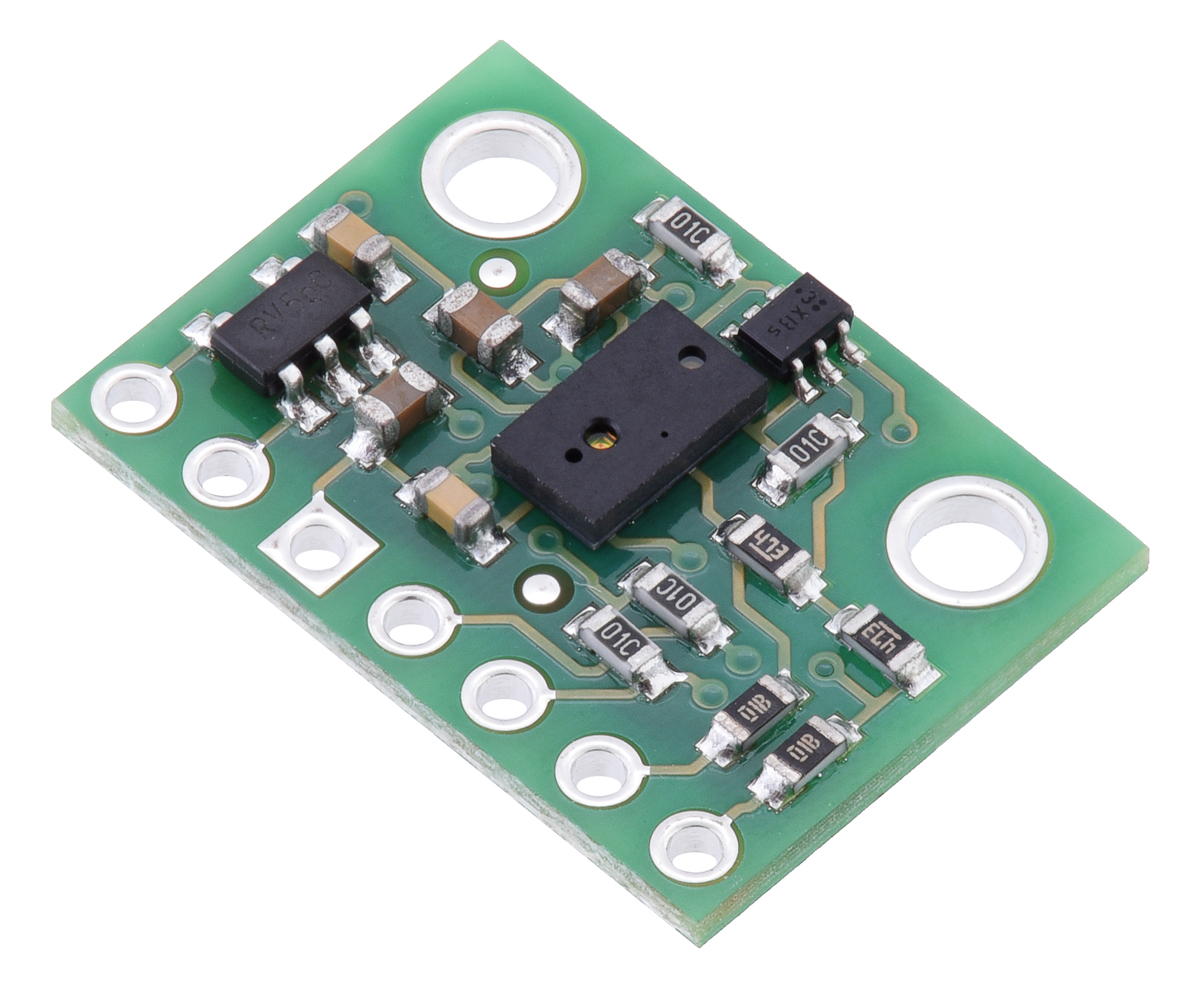 |
There’s another new product coming out of the assembly line here at Pololu: the VL6180X Time-of-Flight Distance Sensor Carrier. The VL6180 from ST Microelectronics distinguishes itself from other optical sensors by using time-of-flight measurements to determine distance: it emits pulses of infrared laser light and precisely times how long they take to reach the nearest object and reflect back to the sensor, which means it is essentially a complete short-range lidar system in a single tiny package.
With this technique, the VL6180X can accurately measure the absolute distance to a target object from 0 cm to at least 10 cm away – sometimes up to 20 cm away, depending on the target and environment – without being affected by what color the target is or how reflective it is.
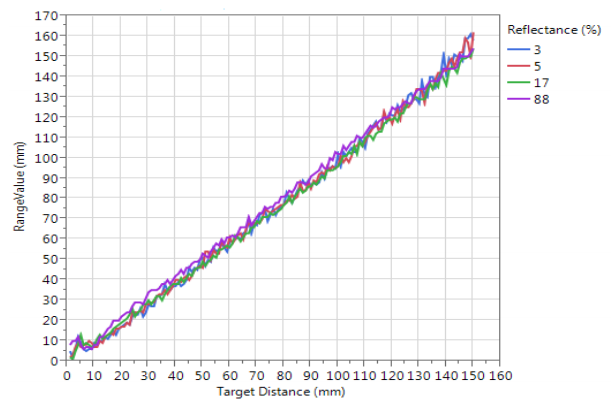 |
VL6180X datasheet graph of typical ranging performance. |
|---|
Distance readings can be obtained through the sensor’s I²C interface (in units of millimeters – no complicated conversions necessary!). The VL6180X also includes an ambient light sensor; this combination of sensing capabilities is useful for applications, including smartphones, for which the VL6180 was designed.
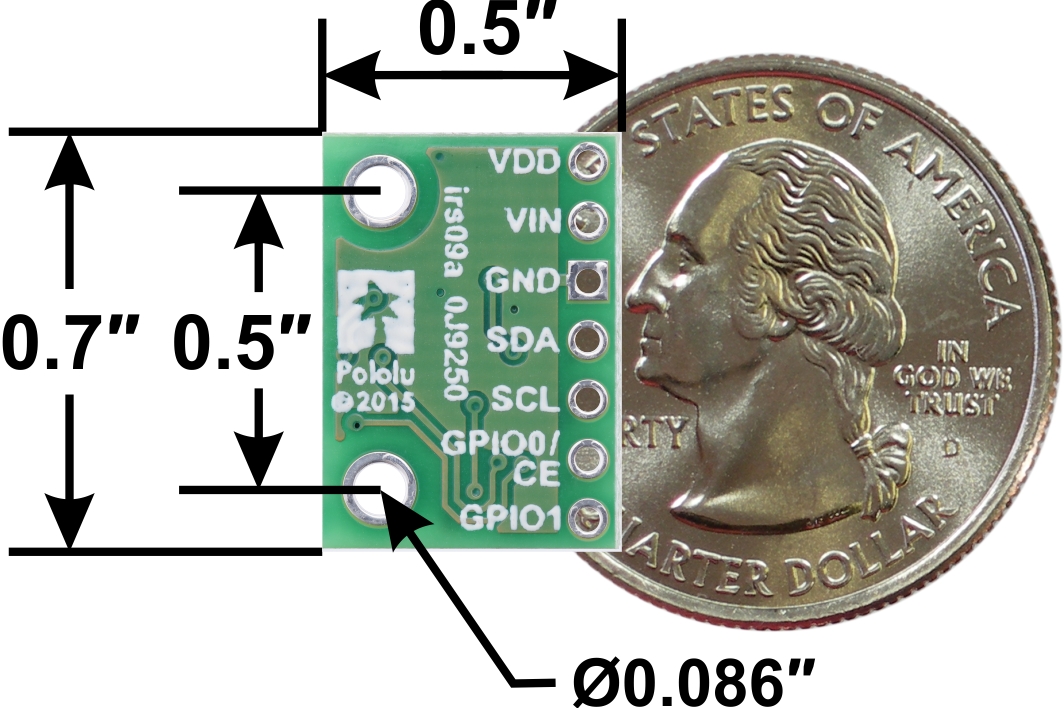 |
The VL6180X IC by itself is a challenge to use because of its small surface-mount package and particular voltage requirements, so our breakout board includes a 2.8 V regulator and level shifters that allow it to be used with 3.3 V and 5 V systems. The carrier board provides a breadboard-friendly pinout and mounting holes while remaining as compact as possible (0.5″ × 0.7″). We’ve also written an Arduino library for the VL6180X that makes it easy to get started with this board.
For more information about the VL6180X carrier, see its product page.

-

New MOSFET-based power switches
- 23 September 2015I am excited to announce four new general-purpose MOSFET-based power switches. But why is Pololu making something as seemingly basic as power...
-

New support for Atmel Studio 7.0 and Windows 10
- 5 October 2015We now support using the Orangutan Robot Controllers, 3pi robot, and the Pololu USB AVR Programmer with the new Atmel Studio 7.0 and Windows 10. To...
9 comments

I have a robot that will have 3 of these sensors and so wish to change the address of each one for obvious reasons.
Thanks,
Mike

This thread on our forum has some code that shows how multiple sensors can be initialized. If you have any further questions, I recommend making a new post on our forum, which is our preferred way of troubleshooting code.
-Nathan

I have used these before, although I will be purchasing from you now because of your low prices.
However, these are NOT time of flight sensors. They cannot be. The speed of light in air (vacuum) is about 1 foot per nanosecond. These things have an accuracy of about 1mm., which I have tested and confirmed. 1mm accuracy corresponds to an electronic accuracy of 3 picoseconds. That is beyond any electronics and certainly something this inexpensive. Even at the nominal distance of 10 cm, the timing is 300 picoseconds total.
So, they way these things actually work is that they are a Swept Wavelength Interferometer. The SWI is basically a Michelson interferometer, but the wavelength is swept and the fringes are measured. This is an incredibly clever device. Laboratory grade SWI instruments typically run $150,000.
Regards,

I'm glad to hear that you like the parts and our prices!
It also sounds impossible to me, and we don't have detailed information about how the ST devices work, but they do specifically talk about measuring the time of flight, and datasheets for similar parts like the ISL29501 give more details about how you can use analog signal processing to determine an absolute flight time. Of course the electronics can't do much in a few picoseconds, but signal rise times of 10 ns/V and millivolt sensitivity are normal, which gets you to that timescale. Building an interferometer in a chip and sweeping the frequency of a laser diode sounds a lot harder.
By the way, the light has to go there and back, so you can double your times, which helps a bit.
-Paul

Do you think that this sensor will be able to detect objects moving fast? (about 3 m/s tops)
What is it's response time?
I'm not familiar with this kind of sensor, how it works, etc.
We build mini sumo robots and it's very hard to find good sensors that fit properly to our restricted space.
We normaly used normal infrared sensors, like Omron's E3Z D62, but it's too big for this aplication.
Thank you very much :)
.
The amount of time the sensor takes to return a distance measurements depends on a number of factors. I recommend looking at the "Range Timing" section starting on page 26 of the VL6180X Datasheet for more information about the time required for ranging and then comparing that to the length of time the target will be in the sensor's field of vision.
-Nathan

This chip uses a mathematical technique called "Square Wave Modulated Indirect Time of Flight". The mathematics involves manipulating & averaging phase changes between the transmitted and received waveforms. This phase difference is directly proportional to the distance x2 taking into account initial conditions such as bias, ambient light, offsets, etc.
The company states a resolution of about 7 picoseconds which is sufficient to discern mm of distance. I've read the white paper on this technique and my masters degree in EE and math got me through most of the math but I don't think I could fully explain it to anyone without a lot more study. Suffice it to say, I think this is pure genius.

This post states that the sensor can measure "without being affected by what color the target is or how reflective it is." However, per the actual datasheet for the sensor, "Instead of estimating the distance by measuring the amount of light reflected back from the object (which is significantly influenced by color and surface).
Can you clarify? My experience with this sensor (through an arduino uno) shows that the sensor is greatly impacted by color, and I've been trying to figure out ways to compensate. I had hoped that the lux sensor would give me enough information to do some math to adjust the distance sensor reading, but I don't see a correlation.
Any help would be appreciated!

If the sensor used only the amount of reflected light to estimate distance, it would be significantly affected by the reflectance of the target (a target that is more reflective would reflect more light, and the sensor might interpret that as the target being closer). By using a time-of-flight measurement instead, the VL6180X should be able to measure the distance more accurately because time of flight should be independent of the reflectance of the target. The graph in the post above (from page 12 of the datasheet) shows that the performance should not vary much with targets ranging from 3% to 88% reflective.
In practice, how much light the target reflects does make some difference, and I think it mainly comes down to signal-to-noise ratio: a large bright target gives a stronger signal than a small dark one, which gives the sensor better data to estimate the distance with. If you look closely at the graph, you can see that the 3%, 5%, and 17% lines are all generally "spikier" than the 88% line; the readings are noisier and less accurate with less reflective targets.
If you're having trouble getting good results, you might be pushing the limits of the VL6180X's capabilities, so you might consider trying the VL53L0X and/or VL53L1X, which are similar sensors optimized for longer ranges (so I also expect them to do better on challenging targets at shorter ranges). Or if you want to try to improve your current system using the VL6180X, you could post on our forum with details of your setup and your code.
Kevin
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
