Pololu Blog »
Update: Orangutans and 3pi robot can be programmed with Arduino 1.6.0
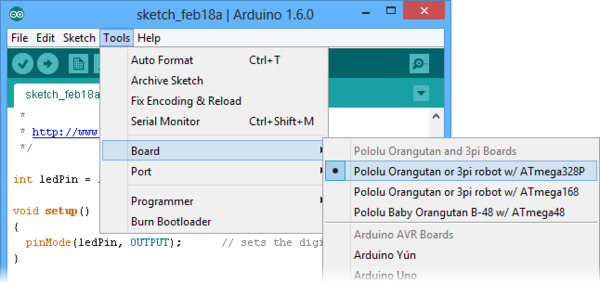 |
We have updated our Programming Orangutans and the 3pi Robot from the Arduino Environment document to support version 1.6.0 of the Arduino IDE, which is the latest stable version. Thanks to improvements in the Arduino IDE, we were able to make the instructions for getting started much easier.
|
|

The Orangutan line of AVR-based robot controllers started ten years ago and has since expanded to include boards with a variety of AVR processors and on-board peripherals, from the minimal Baby Orangutan B-328 to the powerful Orangutan SVP-1284 and X2. Many of the Orangutans share handy features like a buzzer, LCD, and buttons, but the integrated dual motor drivers found on every Orangutan are what justify calling it a “robot controller”. Our 3pi robot is an extension of Orangutan concept to a complete robot, so we think of the 3pi as pretty much part of the Orangutan family.
(Don’t need integrated motor drivers? Check out our Arduino-compatible A-Star family of microcontroller boards.)
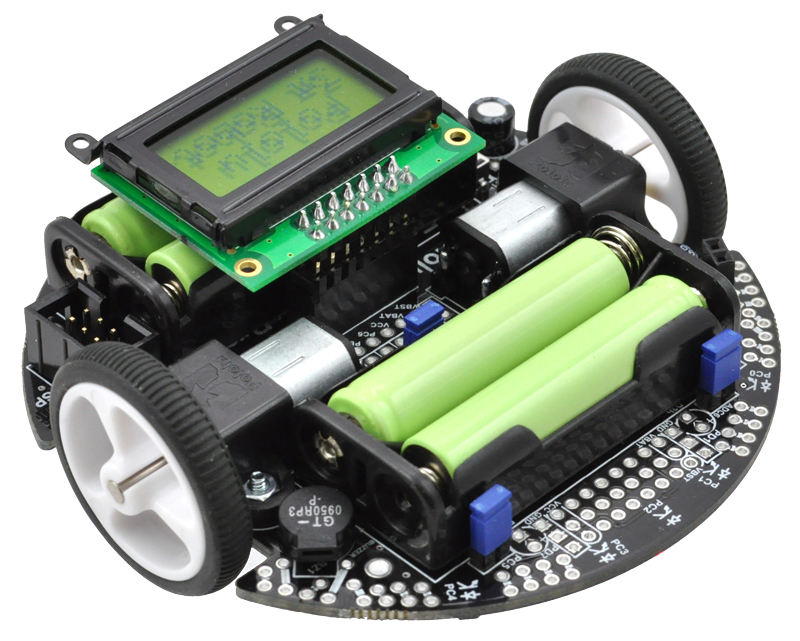 |
Original Pololu 3pi robot. |
|---|
The Orangutan SV-328, Baby Orangutan B-328, and 3pi all use the same AVR ATmega328P processor as the Arduino Uno, so it is natural to want to program them from the Arduino environment. However, there are a couple of key differences to overcome. First, the boards have no pre-installed Arduino bootloader or built-in USB-to-serial adapter. This simplifies the design and frees up some resources for your application, but it means you have to program them with an external programmer like the Pololu USB AVR Programmer. Also, the clock on these boards runs at 20 MHz, while the official Arduinos are at 16 MHz, so time-sensitive code might not be compatible.
Adding support for the Orangutans and programmer to the Arduino IDE used to involve manually editing a few configuration files with a text editor. With this latest update, you can simply copy a folder into your Arduino sketchbook directory.
Another notable Arduino change is improved support for AVRs running at different speeds. Functions such as delay and pulseIn now adapt to the clock frequency specified by the F_CPU macro and should work fine on an Orangutan running at 20 MHz.
To get started, see our guide.
Related products



-

New Product: SparkFun Inventor's Kit (for Arduino Uno)
- 24 February 2015This new version of the SparkFun Inventor’s Kit brings back the Arduino Uno (the previous version had an Arduino-compatible SparkFun RedBoard). The...
-

200,000 orders and new Zumo robot preview
- 3 March 2015We received order 1J200000 this morning from Ralf in Germany! However, it turns out that because of a one-time database screwup, this was not...

Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation

