Support » Pololu A-Star 32U4 Robot Controller User’s Guide » 3. A-Star 32U4 Robot Controller with Raspberry Pi Bridge »
3.3. LV motor drivers
The A-Star 32U4 Robot Controller LV features two Texas Instruments DRV8838 motor drivers that can each deliver a continuous 1.8 A. The motor power supply is derived from an external source connected to the A-Star’s Power In terminals, which also feeds the on-board voltage regulator and should have a voltage between 2.7 V and 11 V. (Although the DRV8838 works with motor supply voltages as low as 0 V, the voltage regulator requires a minimum input voltage of 2.7 V.) For more information about the drivers, see the DRV8838 datasheet (1k redirect). (We also sell a standalone carrier board for this motor driver.)
The motor driver outputs, together with power pins, are connected to sets of through-holes along the left side of the board. The larger holes are designed for 3.5 mm screw terminal blocks, which are soldered in on the assembled version. Alternatively, 0.1″ headers can be used with the smaller holes on the SMT-only version, or motor wires can be soldered directly to either set of holes.
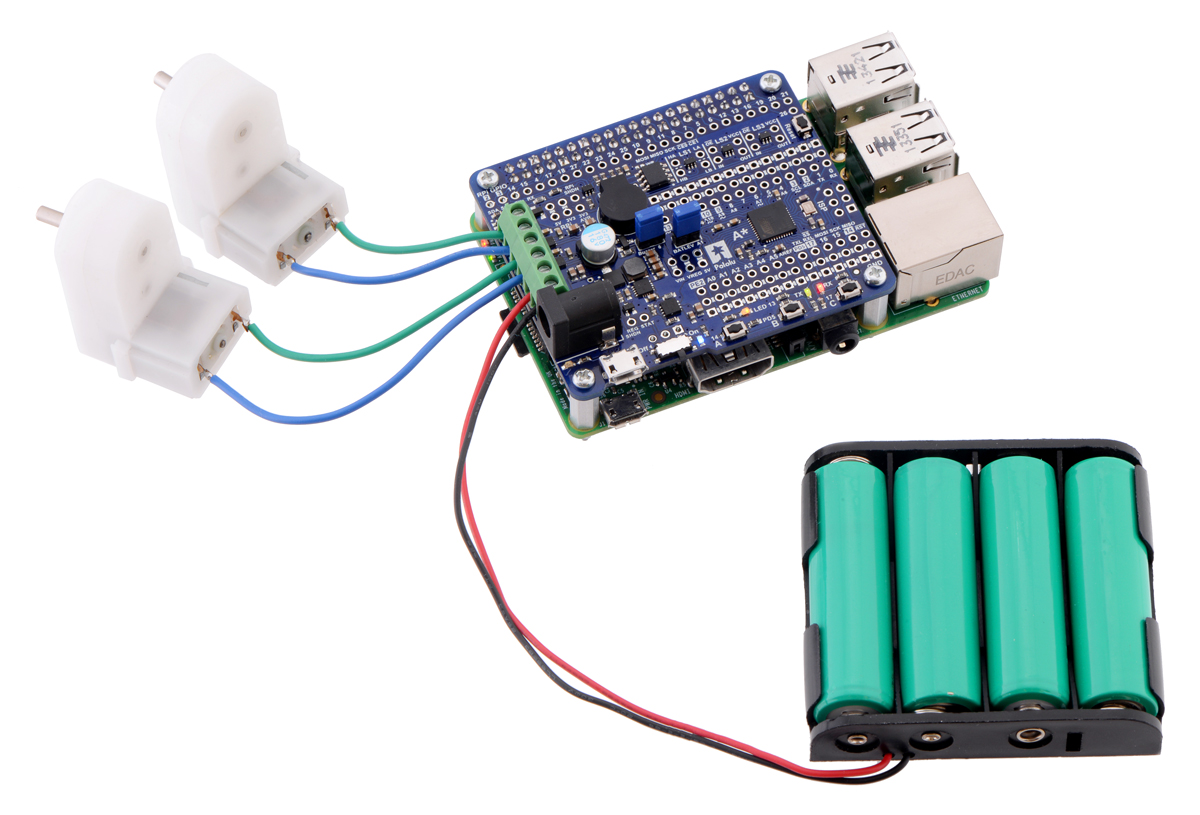 |
Driving motors with an A-Star 32U4 Robot Controller LV with Raspberry Pi Bridge on a Raspberry Pi Model B+ or Pi 2 Model B. |
|---|
Although the LV and SV versions of the robot controller use different driver ICs, the motor driver interface is identical between the two versions. Four pins are used to control the drivers:
- Digital pin 12, or PD6, controls the direction of motor 1 (when LOW, motor current flows from A to B; when HIGH, current flows from B to A).
- PE2 (which does not have an Arduino pin number) controls the direction of motor 2.
- Digital pin 9, or PB5, controls the speed of motor 1 with PWM (pulse width modulation) generated by the ATmega32U4’s Timer1.
- Digital pin 10, or PB6, controls the speed of motor 2 with PWM.
The AStar32U4 library provides functions that allow you to easily control the motors.
Maximum current and power dissipation considerations
The DRV8838 datasheet recommends a maximum continuous current of 1.8 A, and the robot controller’s printed circuit board typically draws enough heat out of the motor driver chips to allow it to sustain this amount of current. In our tests, we found that the chip was able to deliver 1.8 A for many minutes without triggering a thermal shutdown. Our tests were conducted at 100% duty cycle with no forced air flow; PWMing the motor will introduce additional heating proportional to the frequency.
Motor currents over 1.8 A will likely trip either the over-temperature or over-current protection of the DRV8838. The current limiting threshold can be as low as 1.9 A or as high as 3.5 A. This limiting helps prevent damage to the drivers if a motor draws too much current, although the reduced current output will degrade motor performance.
Some situations can increase heating of the motor drivers and reduce their maximum available current output, such as drawing a large amount of current from the A-Star’s 5 V regulator, mounting the board on a Raspberry Pi, or using it in an enclosure that limits air flow. The actual current you can deliver will depend on how well you can keep the motor drivers cool.
This product can get hot enough to burn you long before the chip overheats. Take care when handling this product and other components connected to it.






Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
