Support » Pololu Jrk USB Motor Controller User’s Guide » 3. Configuring the Motor Controller »
3.f. Error Response Options
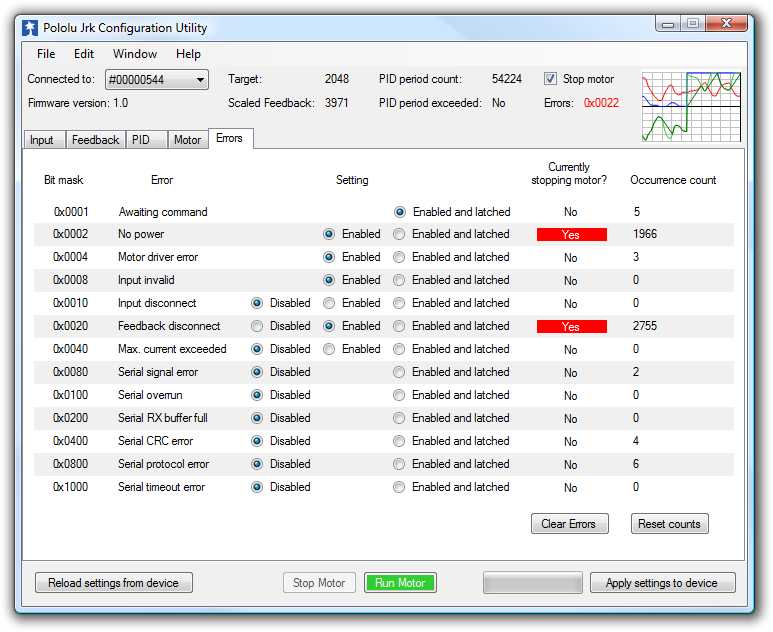 |
The Errors tab of the Jrk Configuration Utility |
|---|
There are several errors that can stop the jrk from driving its motor. For information about what each error means, see Section 4.f.
The jrk’s response to the different errors can be configured. Each error has up to three different available settings.
- Disabled: The jrk will ignore this error. You can still determine whether the error is occurring by checking the “Occurrence count” column in the configuration utility, or by using the Get Error Flags Occurred serial command (Section 4.f).
- Enabled: When this error happens, the jrk will turn the motor off. When the error stops happening, the motor can restart.
- Enabled and Latched: When this error happens, the jrk will turn the motor off and set the Awaiting Command error bit. The jrk will not drive the motor again until it receives one of the serial set target commands. The motor can also be restarted from the configuration utility.





Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
