Pololu Blog »
Open-source myoelectric hand prosthesis
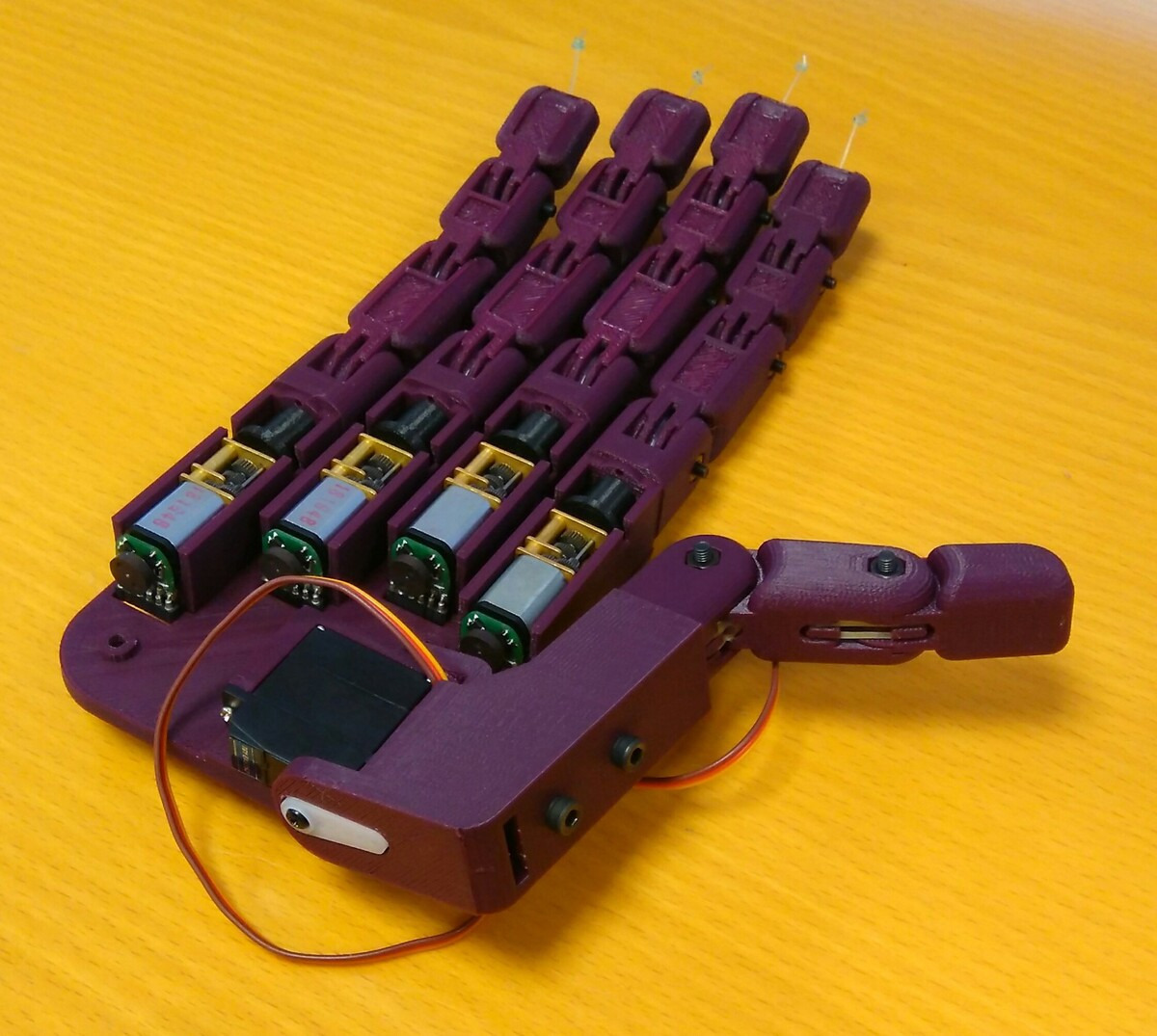
Pololu customer Alvaro Villoslada made this impressive open-source 3D-printable hand prothesis. Each finger uses a 1000:1 Micro Metal Gearmotor HP 6V with Extended Motor Shaft to wind a fishing line—acting as a tendon—onto a spool. A magnetic encoder attached to each motor enables closed-loop control, and the motors are driven by DRV8838 DC motor driver carriers. An RC hobby servo controls the thumb position. Alvaro uses a Teensy 3.1 microcontroller to monitor the encoders and control the actuators, and he built a user interface in Python for controlling the hand from a computer.
 |
For CAD files, detailed instructions and more pictures and videos, see the Hackaday project page.
Related products



-

Guide utilisateur du Robot Zumo Pololu
- 16 May 2017MCHobby, a Pololu distributor, translated the Pololu Zumo Shield for Arduino User’s Guide to French as the Guide utilisateur du Robot Zumo Pololu...
-

Memorial Day weekend sale
- 26 May 2017We are having a big Memorial Day sale now through Tuesday, with discounts on over 1000 products when you use the coupon code MEMORIALDAY17. Stock...
1 comment

Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
