Old and Discontinued Serial Motor Controllers »
Pololu SMC04 High-Power Motor Controller w/Feedback

A high-power version of our 3-Amp motor controller, the SMCO4 has the same convenient interfaces (serial, hobby RC pulse, or analog) and improved (10-bit) closed-loop PID control of motor speed or position, all with a more powerful motor driver that can handle higher-current motors.
 Compare all products in Old and Discontinued Serial Motor Controllers.
Compare all products in Old and Discontinued Serial Motor Controllers.
| Description | Specs (0) | Pictures (2) | Resources (2) | FAQs (0) | On the blog (1) | Distributors (0) |
|---|
Note: We have released a second-generation version of this controller, the Jrk 12v12 USB Motor Controller with Feedback, which has many substantial improvements over the SMC04. This product is only available by large-volume special order. Please contact us us if you are interested.
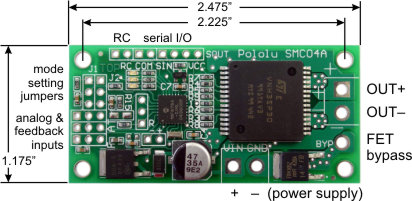 |
The SMC04 high-power motor controller with feedback has multiple interface and feedback options that simplify servo control of commonly available DC motors. The module features three independent interfaces: a serial protocol for microcontroller-based applications, a pulse-width interface for connection to hobby radio control equipment or serial servo controllers, and an analog voltage interface for simple tests and demonstrations. Two feedback alternatives allows for closed-loop control of position or speed. The SMC04 is higher-current version of our 3-A motor controller with feedback that can handle larger motors with its VNH2SP30 motor driver chip, which is also available by itself and on a carrier board.
 |
The SMC04 motor controller distinguishes itself from other devices in its class by offering a complete feedback-based solution for applications requiring bi-directional, closed-loop control. The user can select either an analog voltage feedback or a digital encoder feedback (quadrature encoding is not supported). With the two feedback alternatives, various simple devices such as potentiometers can be used as sensors to achieve position or speed control.
In a typical application, a user first sets up the motor controller’s parameters based on the physical properties of the mechanical system that is being driven. A feedback potentiometer is coupled to the mechanism output, and the user can then send position commands to the motor controller, which automatically drives the motor to reach the position. Alternatively, the mechanism and sensor can be arranged to provide speed feedback, in which case the motor controller maintains given speeds despite fluctuations in friction or supply voltage.
The motor controller measures 2.475" x 1.175" and has an operating voltage of 6–16 volts, making the device well-suited for medium-sized robots and other projects powered by rechargeable 7.2 V or 9.6 V battery packs or 12 V lead-acid batteries. The motor controller serial protocol is compatible with other Pololu motion control devices, allowing multiple units to be connected to a single serial line to control a mixture of motors and hobby RC servos.
Related products













Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
