Sub-Micro Servo 3.7g

This generic sub-micro servo is one of the lightest servos we carry, weighing just 3.7 g (0.13 oz) without the lead. It is intended for use between 4.8 and 6 V (i.e. with 4- or 5-cell NiMH or NiCD battery packs). Servo horns and associated hardware are included.
Key specs at 6 V: 0.07 sec/60°, 6 oz-in (0.4 kg-cm), 3.7 g (0.13 oz).
| Description | Specs (9) | Pictures (1) | Resources (0) | FAQs (2) | On the blog (3) | Distributors (0) |
|---|
- What are the wires coming out of my servo?
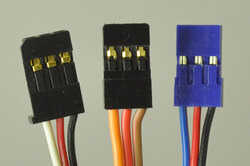
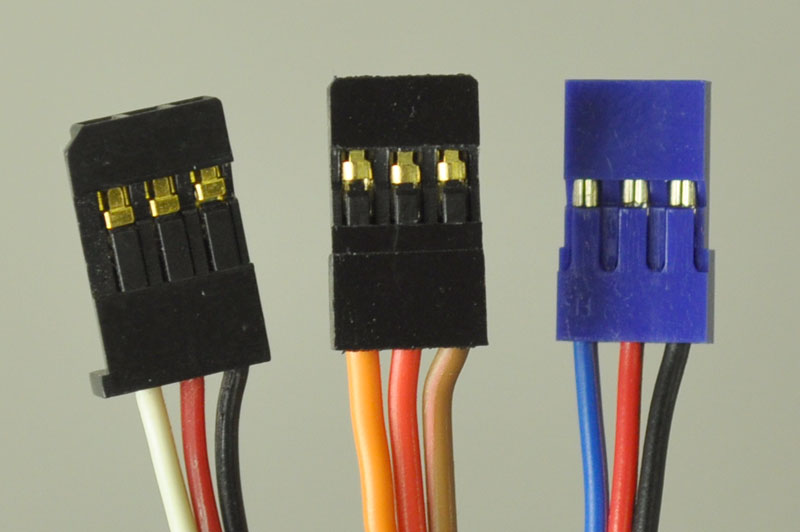
Most standard radio control (RC) servos have three wires, each a different color. Usually, they are either black, red, and white, or they are brown, red, and orange/yellow:
- brown or black = ground (GND, battery negative terminal)
- red = servo power (Vservo, battery positive terminal)
- orange, yellow, white, or blue = servo control signal line
Please check the specs for your servo to determine the proper power supply voltage, and please take care to plug the servo into your device in the proper orientation (plugging it in backwards could break the servo or your device).
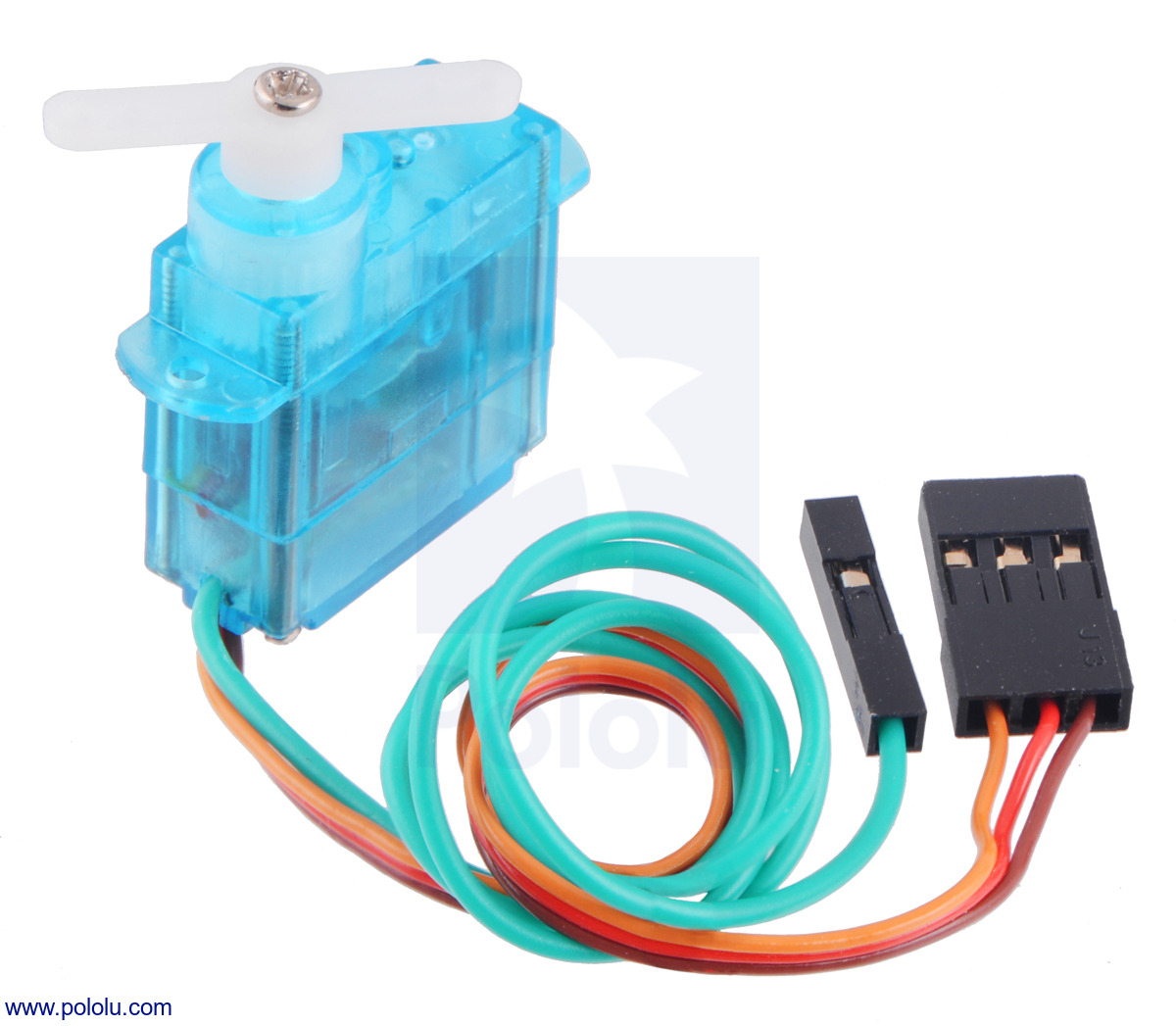
Note: Some of the servos we carry also have an optional fourth green wire that is separate from the three standard ones. This wire provides access to the feedback potentiometer, allowing you to directly measure the position of the output. The servos with this extra wire have "with Position Feedback" at the ends of their product names. The picture below is an example of such a servo.
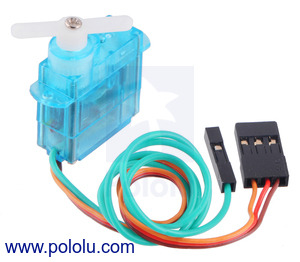
FEETECH Sub-Micro Servo FS0403-FB with Position Feedback.
- How many degrees can this servo turn? Why do you not list it with the other specifications?
We do not specify the range of rotation of our servos because this information is not generally available from servo manufacturers. RC servos are usually intended for controlling things like the steering mechanism in an RC car or the flaps on an RC plane. Manufacturers make sure that the range is enough for these typical applications, but they do not guarantee performance over a wider range.
This means most RC servos will rotate about 90° using the standard 1–2 ms pulse range used by most RC receivers. However, if you are using a controller capable of sending a wider range of pulses, many servos can rotate through almost 180°.
You can find a servo’s limits if you use a servo controller that can send pulses outside of the standard range (such as our Maestro servo controllers). To find the limits, use the lowest possible supply voltage at which the servo moves, and gradually increase or decrease the pulse width until the servo does not move any further or you hear the servo straining. Once the limit is reached, immediately move away from it to avoid damaging the servo, and configure your controller to never go past the limit.
You might be wondering why we do not just follow the above steps for all the servos we carry and list a specification for degrees of rotation. Unfortunately, since servo manufacturers do not specify the range of rotation, it might change from one manufacturing run to the next. They will not inform us about changes that are not specified, and we have no way of knowing if or when they might change their manufacturing process.
For more information about servos and how to control them, we recommend the series of blog posts on servos starting with: Introduction to servos.
Related products











Related categories








Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
