Support » Pololu Dual G2 High-Power Motor Driver Shields for Arduino User’s Guide » 4. Board connections »
4.a. Power
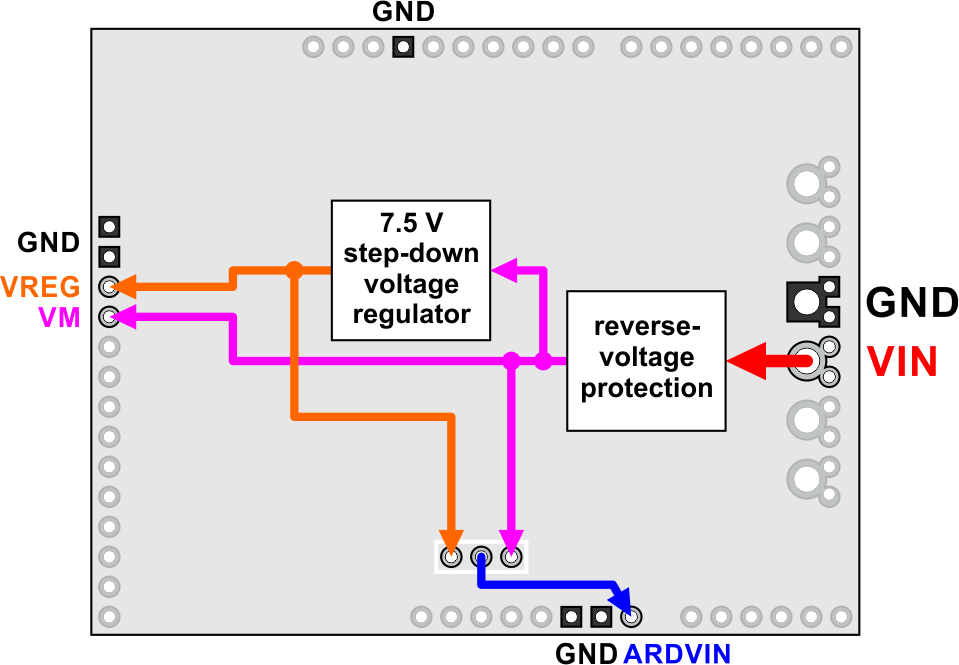 |
Dual G2 high-power motor driver shield power bus diagram. All of the square ground pads are internally connected. |
|---|
An appropriate motor power supply should be connected to the motor driver’s large VIN and GND pads on the right side of the board. The minimum operating voltage for these shields is 6.5 V, and the maximum operating voltage is 30 V for the 18vX versions and 40 V for the 24vX versions. These are absolute maximums, so the 18vX versions are not intended for use with 24 V batteries, which can significantly exceed 24 V when fully charged.
It is important that you use a power source that is capable of delivering the current your motors will require. For example, alkaline cells are typically poor choices for high-current applications, and you should almost never use a 9V battery (the rectangular type with both terminals on the same side) as your motor power supply.
The board includes a reverse-voltage protection circuit that helps prevent damage in case the motor power supply is connected backward. The reverse-protected input voltage can be accessed for use in other circuits through the pin labeled VM on the left side of the board, and this reverse-protected voltage can optionally be used to power an Arduino when this board is used as a shield:
 |
The board also includes a 7.5 V, 1 A switching step-down regulator. The regulator output can be accessed through the pin labeled VREG on the left side of the board, and it can also optionally be used to power an Arduino when this board is used as a shield:
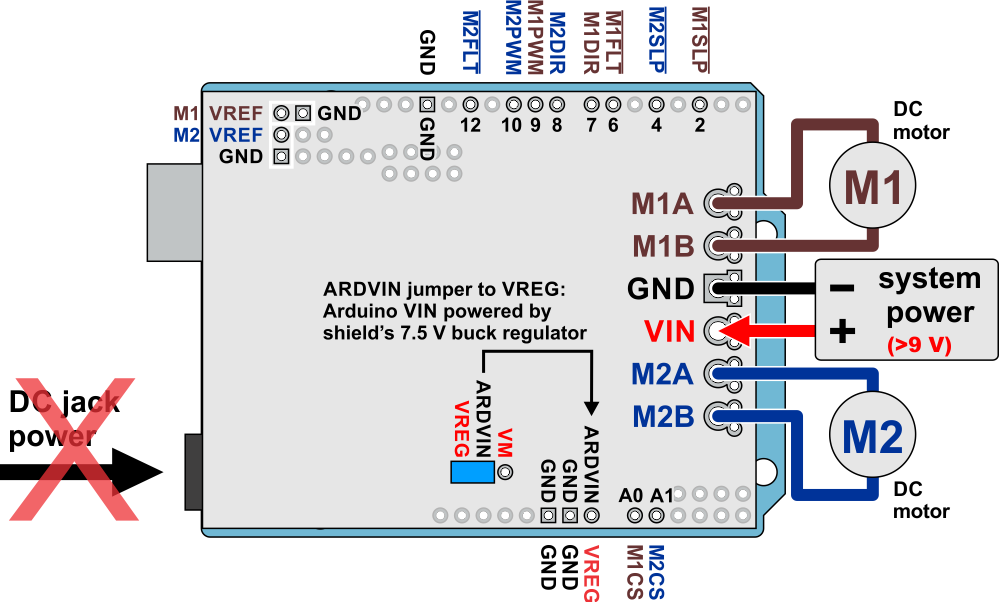 |
This is the recommended method for powering an Arduino for shield input voltages over 9 V.
The blue power LED is connected by VREG and illuminates whenever the board is powered.
Warning: When powering an Arduino from the motor shield, you must never connect a different power supply to the Arduino’s VIN pin or plug a power supply into the Arduino’s power jack, as doing so will create a short between the shield’s power supply and the Arduino’s power supply that could permanently damage both the Arduino and the motor shield.
Note that the shorting block just routes the motor power to the Arduino VIN pin, so plugging in USB with this shorting block in place is just like plugging in USB with the Arduino powered from its power jack. On standard Arduinos we recommend against plugging a powered Arduino into USB (see this forum post for more information), but on some Arduino-compatible boards such as the A-Stars, this is completely safe.
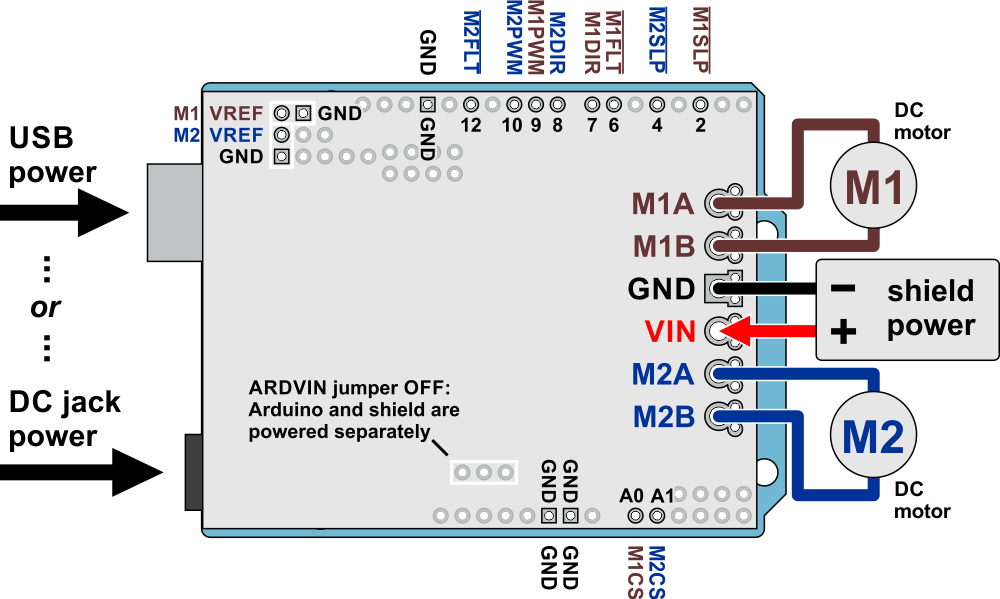
If you leave the ARDVIN jumper off, the Arduino power is independent of the shield power, and the two must be powered separately when using this driver as a shield:
 |
Changing VREG to 5 V
The on-board regulator can optionally be configured to output 5 V instead of 7.5 V by cutting a trace between two SMT jumper pads:
 |
You can bridge these two pads with solder if you later want to restore it to 7.5 V. Note that 5 V is too low to power typical Arduinos through their VIN pins (which is why the default is 7.5 V).
Real-world power dissipation consideration
The MOSFETs can handle large current spikes for short durations (e.g. 100 A for a few milliseconds), and the driver’s current chopping will keep the average current under the set limit. The peak ratings are for quick transients (e.g. when a motor is first turned on), and the continuous rating is dependent on various conditions, such as the ambient temperature. PWMing the motor will introduce additional heating proportional to the frequency. The actual current you can deliver will depend on how well you can keep the motor driver cool. The driver’s printed circuit board is designed to draw heat out of the MOSFETs, but performance can be improved by adding a heat sink or air flow. For high-current installations, the motor and power supply wires should also be soldered directly instead of going through the supplied terminal blocks, which are rated for up to 16 A.
Warning: This motor driver has no over-temperature shut-off. An over-temperature or over-current condition can cause permanent damage to the motor driver. You might consider using either the driver’s integrated current sense output or an external current sensor to monitor your current draw.
This product can get hot enough to burn under normal operating conditions. Take care when handling this product and other components connected to it.






Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
