Pololu Blog »
High-altitude balloon for the solar eclipse
 |
UNLV mascot Hey Reb! high above Idaho (and a commercial jet) during the partial eclipse. |
|---|
This summer, Jon and I participated in NASA’s nationwide Eclipse Ballooning Project with the University of Nevada. Specifically, we were members of the University of Nevada, Las Vegas (UNLV) section of Nevada’s team, which also had a section from the University of Nevada, Reno (UNR). Our goal was to make a payload to collect interesting video footage and scientific data, then fly that payload on a high-altitude balloon that would ascend to around 100,000 ft in the totality zone during the 2017 solar eclipse on August 21.
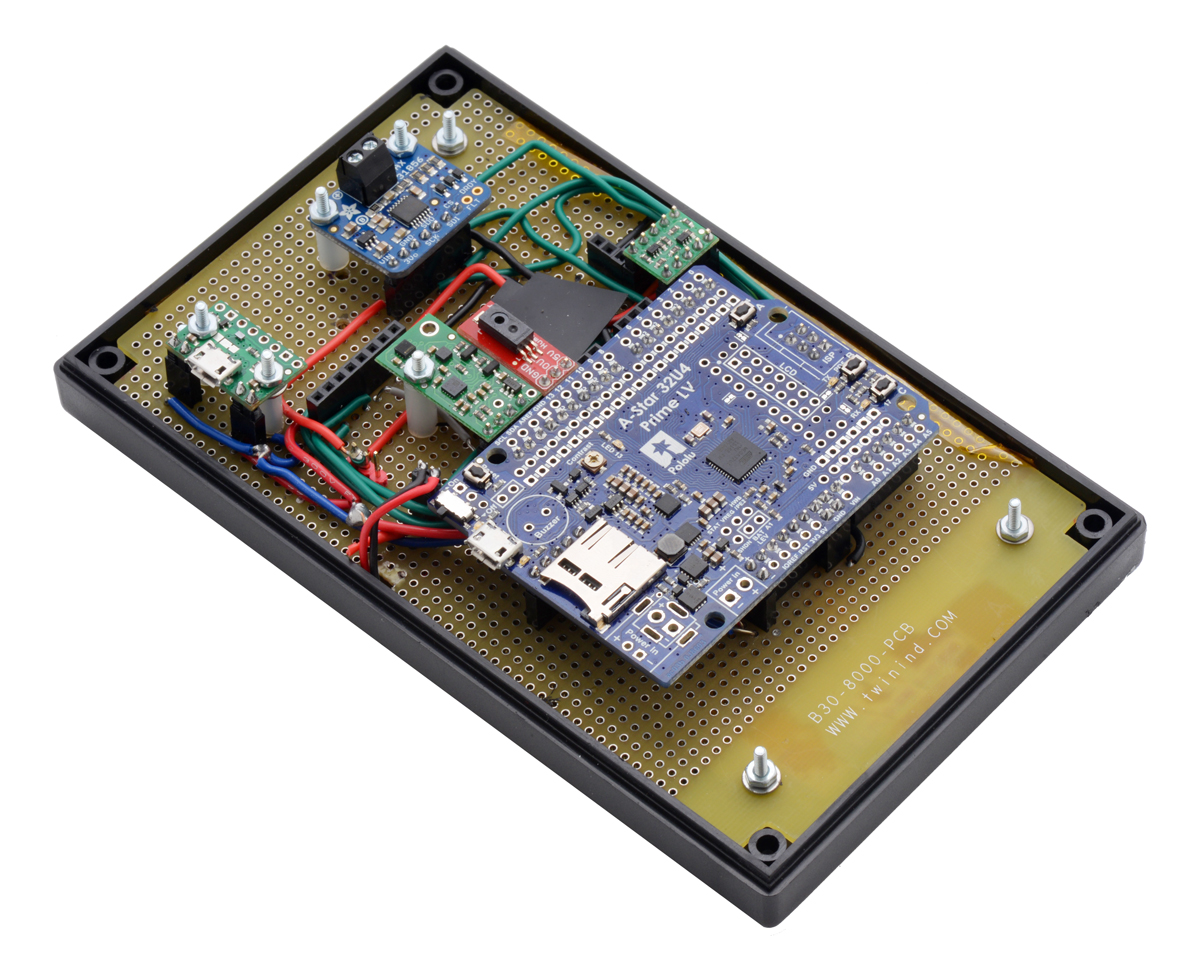
Before the eclipse, the UNLV team did a practice launch near Nipton, California. For this launch the payload included a humidity sensor, an AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter, and an A-Star 32U4 Prime LV with a microSD card for datalogging. All these electronics were contained in a plastic project box with a mobile phone charger as a power source. A heating pad powered through the A-Star Prime’s 5 V regulator kept the electronics in the project box at an operable temperature range, and the project box was insulated in a styrofoam box to prevent heat from escaping during the flight. The payload also included an Automatic Packet Reporting System (APRS), a Spot Tracker, and two GoPro cameras. Telemetry from the APRS allowed us to track the position, altitude, heading, speed, and surrounding temperature of the payload during the flight. Our APRS reported data roughly every three minutes, and we programmed our A-Star to collect sensor data ten times per second.
|
|

We considered this practice launch a success because our team, which consisted mostly of people who had never launched a high-altitude balloon before, prepared and launched the balloon/payload and recovered it during an unpredicted thunderstorm. Despite the storm, the A-Star and the other electronics stayed warm and collected data through the entire flight without incident. Even though the GoPro cameras ran out of memory during the descent, they obtained some awesome images of desert mountain landscape, Lake Mohave, and the Colorado River from over 90,000 ft.
 |
Lake Mohave and the Colorado River from above during practice launch. |
|---|
The practice launch also offered an opportunity to highlight any weaknesses or flaws in our design, which we could improve or fix before the actual eclipse mission. For example, we learned that we did not properly take into account how much twisting and rotating the entire payload would undergo. The twisting and rotating was apparently strong enough to completely unscrew our APRS dipole antenna from its holder; it separated during the descent when the balloon was still over 50,000 ft above ground! Thankfully, our Spot Tracker was able to acquire a satellite signal and relay its position so we could recover our payload. For the eclipse launch, we took special care to in securing APRS antenna before liftoff and added another Spot Tracker backup.
Additionally, after reviewing the data collected from the practice launch, we realized that during key events (e.g. liftoff, burst, landing) the payload both accelerated harder and rotated faster than we could measure with the default configuration settings of our accelerometer/gyroscope. Our code uses the Pololu LSM6 library, which by default configures the sensors to use the smallest full scale range (+/-2 g for acceleration and (+/- 240 dps for rate of rotation). We wanted to better characterize the magnitude of the acceleration and rate of rotation during those extremes, so, for the eclipse, we increased the full scale range to the maximum settings ((+/-16 g for acceleration and +/- 2000 dps for rate of rotation).
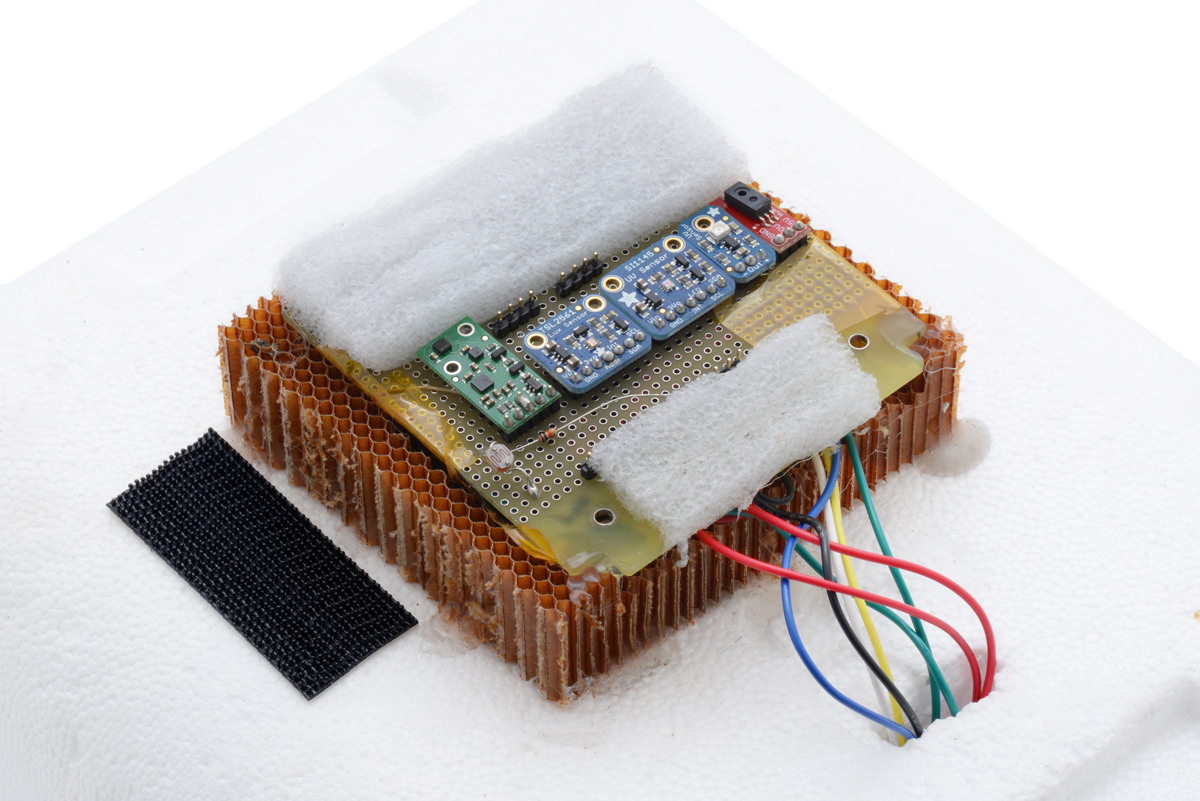 |
Exterior sensors. |
|---|
Another improvement for the eclipse launch was the addition of a second group of sensors to the payload to collect data from outside the insulated styrofoam box. This group of external sensors includes a photocell, a luminosity/lux/light sensor, an infrared/visible light detector, and an ultraviolet light detector, another humidity sensor, and a second AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter. These external sensors also required a heating pad, but adding another pad would push the A-Star Prime’s 5V regulator to its limit. The phone charger supplies power through a USB-micro connection, so we decided to access the 5V power from the charger’s USB power bus. Thankfully, our mobile phone charger could handle the extra current we wanted to supply. Ideally, we should have used something like Pololu’s USB-micro breakout board. We were short on time though, so we used what we had on hand, a FPF1320 Power Multiplexer Carrier with USB Micro-B Connector (the carrier makes VBUS accessible through 0.1"-spaced headers). In addition to the electronics added to the A-Star system, we also added a microbiology experiment for NASA Ames and a Geiger counter with its own data logging equipment.
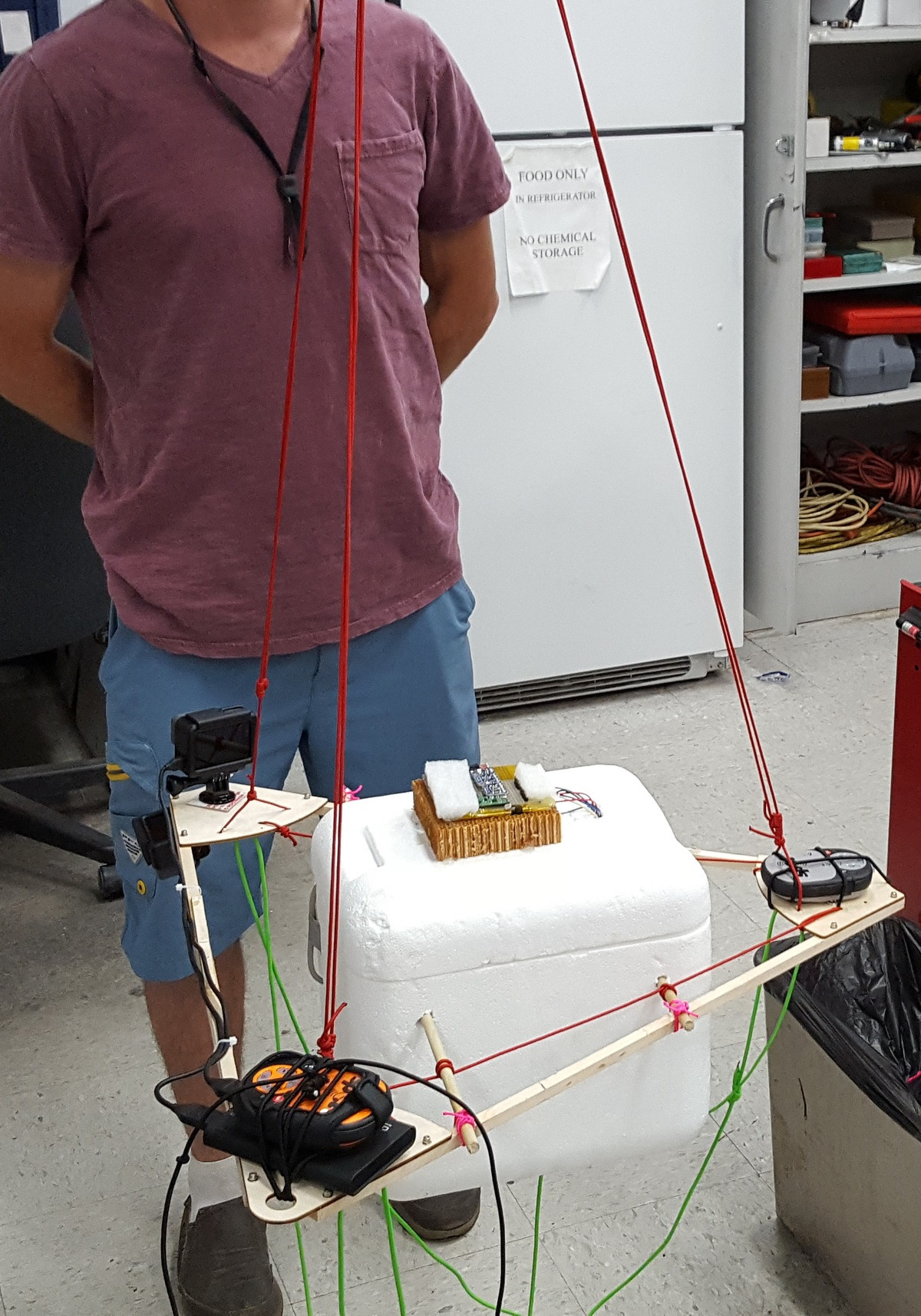 |
Preparing main payload before eclipse launch. |
|---|
For the eclipse, the UNLV and UNR teams met in Idaho and launched our balloons and payloads north of Hamer, Idaho so that they would be near maximum altitude during the totality. One of the objectives for the UNR section of the team was to live-stream video footage of the balloon flight during the eclipse. The radio equipment they used for this required the receiver to automatically maintain a line-of-sight with the balloon. They accomplished this using a Micro Maestro 6-Channel USB Servo Controller to operate a servo pan-tilt assembly.
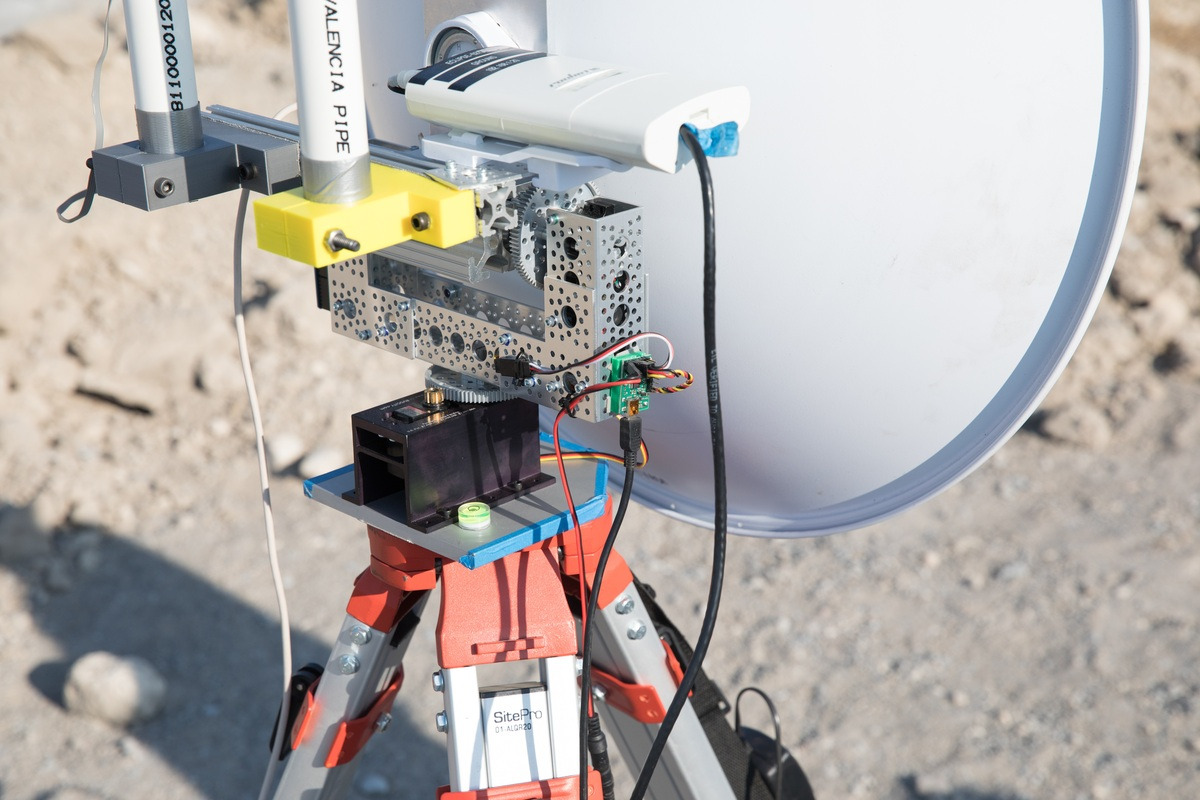 |
Receiver for UNR balloon live-stream. |
|---|
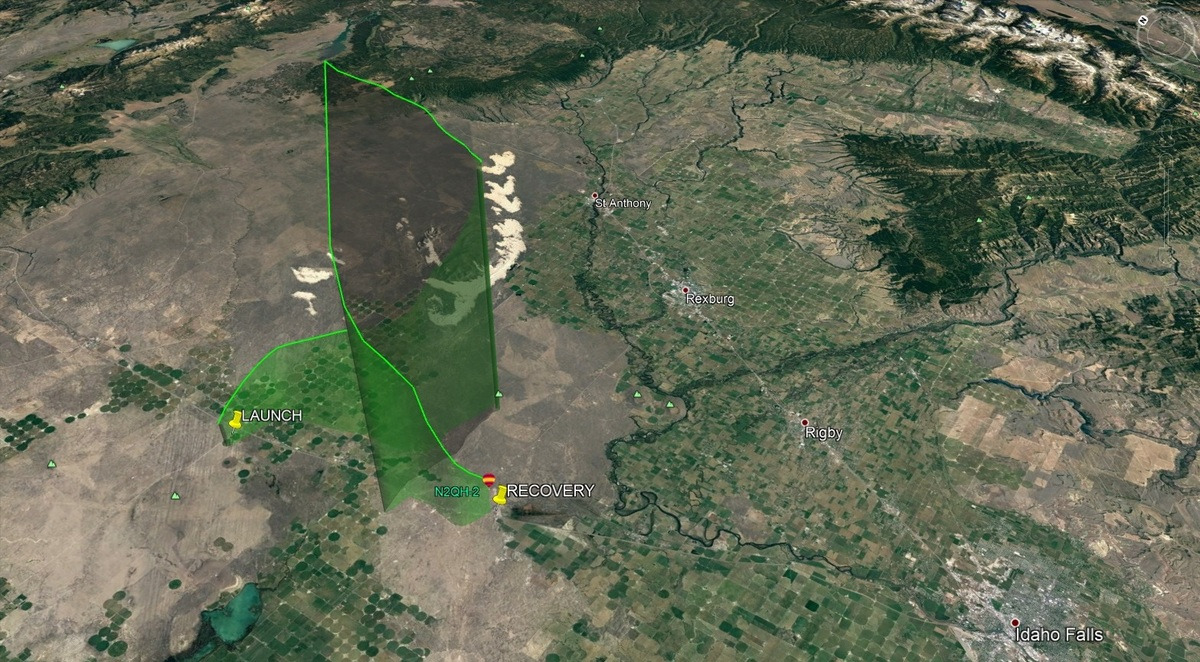
The eclipse launches were a great success! UNR launched and recovered two balloons and payloads. One balloon landed on a farm, and the second was retrieved from a residential backyard. Although they were not able to successfully live-stream their flight, they were able to collect cool data and GoPro video. The UNLV balloon and payload that Jon and I worked on ascended over 100,000 ft, and it was between 85,000 ft and 90,000 ft during the totality. We recovered the balloon and payload about one mile east of Interstate 15 south of Hamer, Idaho. The next image below shows the flight path of the UNLV balloon during the eclipse. You can more closely examine the path by opening this file (2k kmz) in a desktop Google Earth program.
 |
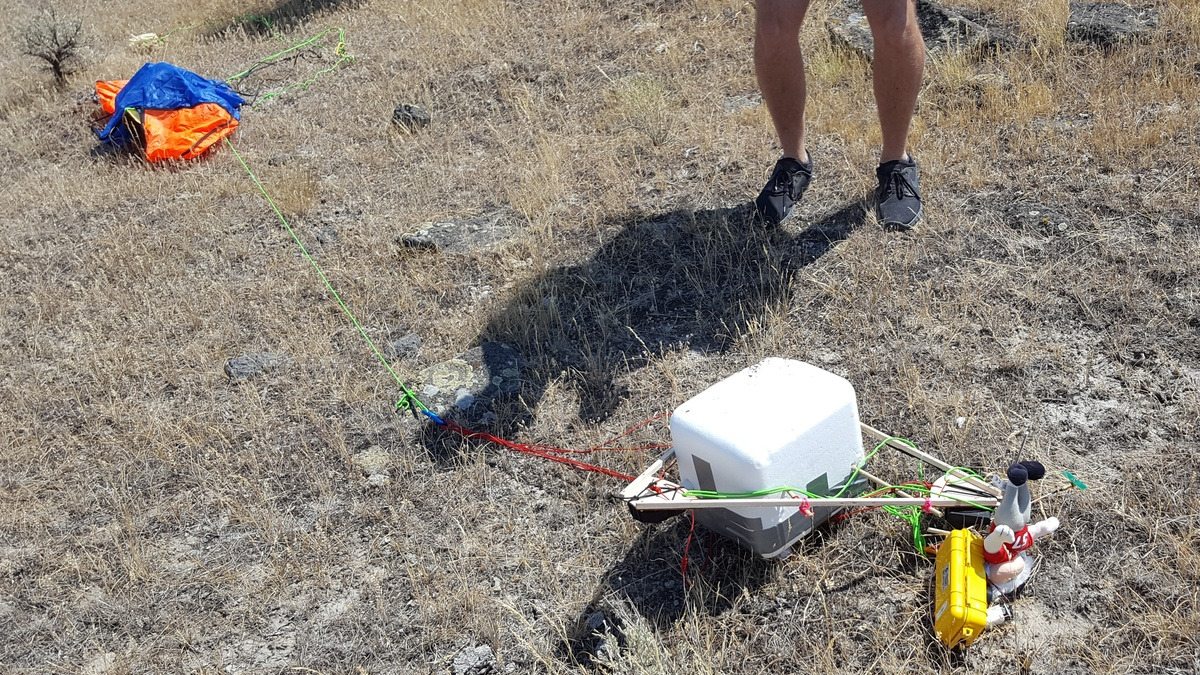 |
Payload recovery after the eclipse. |
|---|
The A-Star successfully logged data from all the sensors during the entire flight. To share and analyze the data, I used a MATLAB script to create and save graphs of the data. I quickly learned that many of the sensor signals also had a lot of interference that distorted the true patterns during the eclipse. In MATLAB I had to create functions that removed this electrical noise from the data sets. The graphs below show the readings throughout the flight from the humidity sensor inside the payload and the humidity sensor exposed to the environment. The graph on the left demonstrates how much interference there was in the raw data, and the graph on the right demonstrates the effect of removing that noise on the clarity of the graph.
|
|


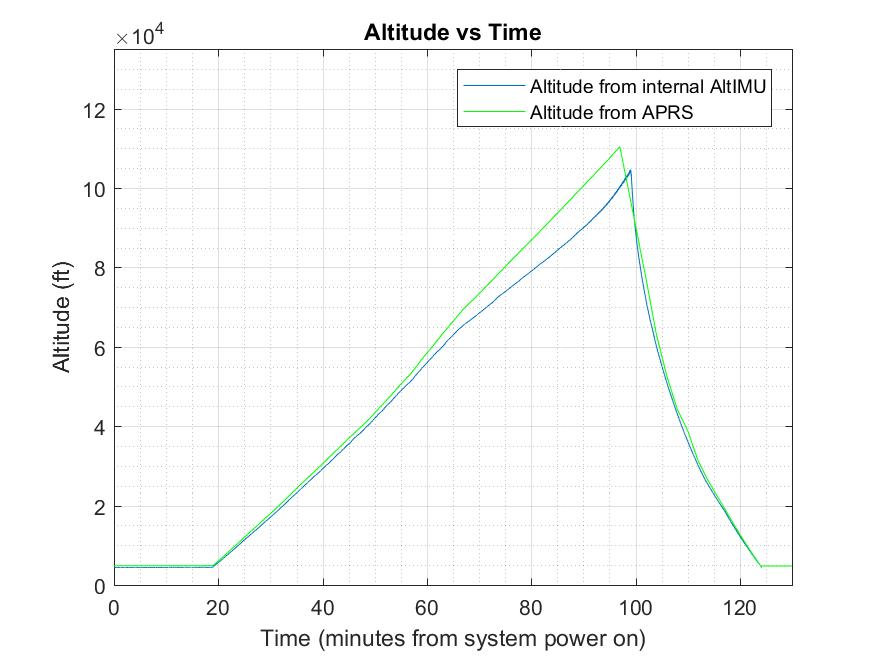
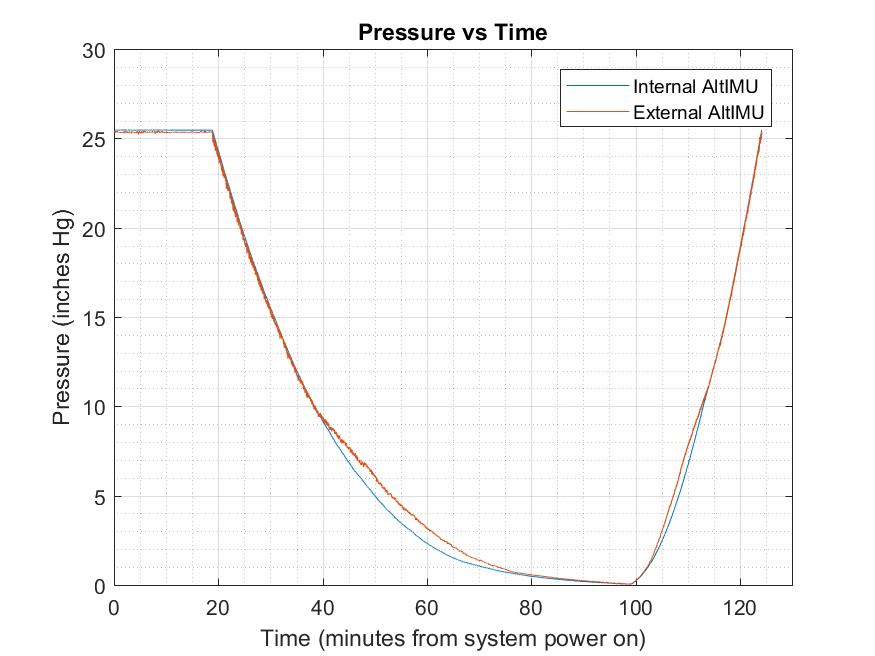
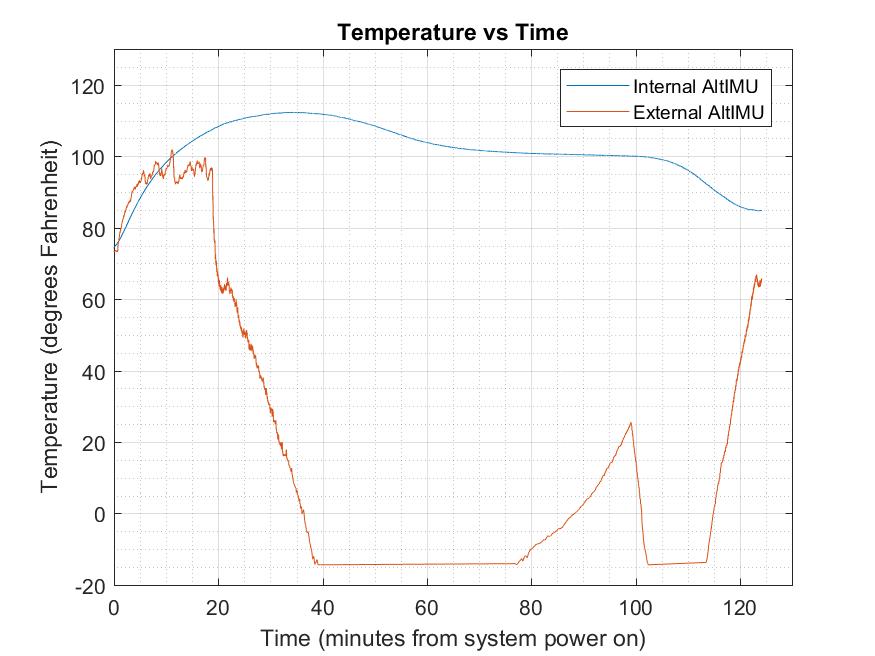
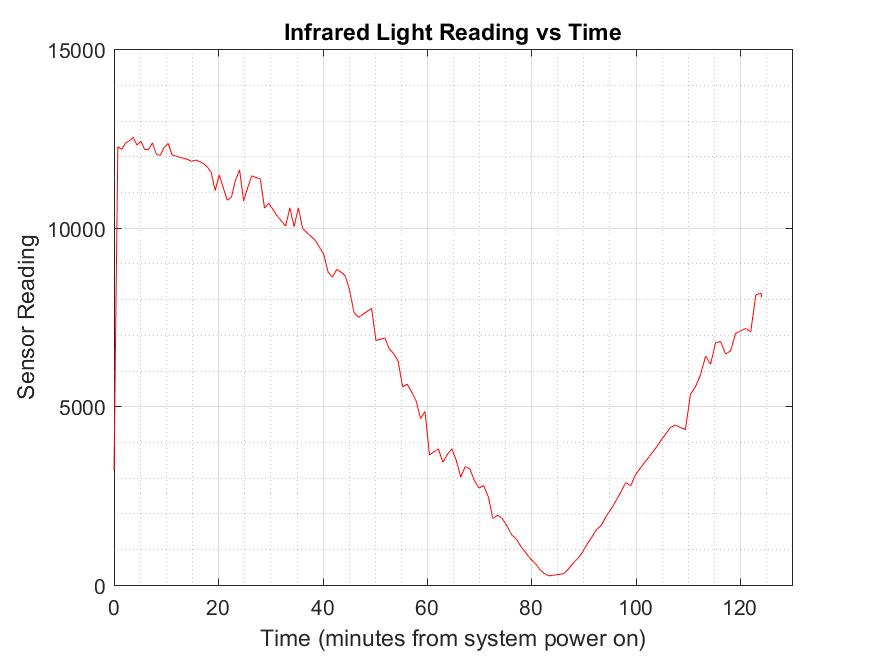
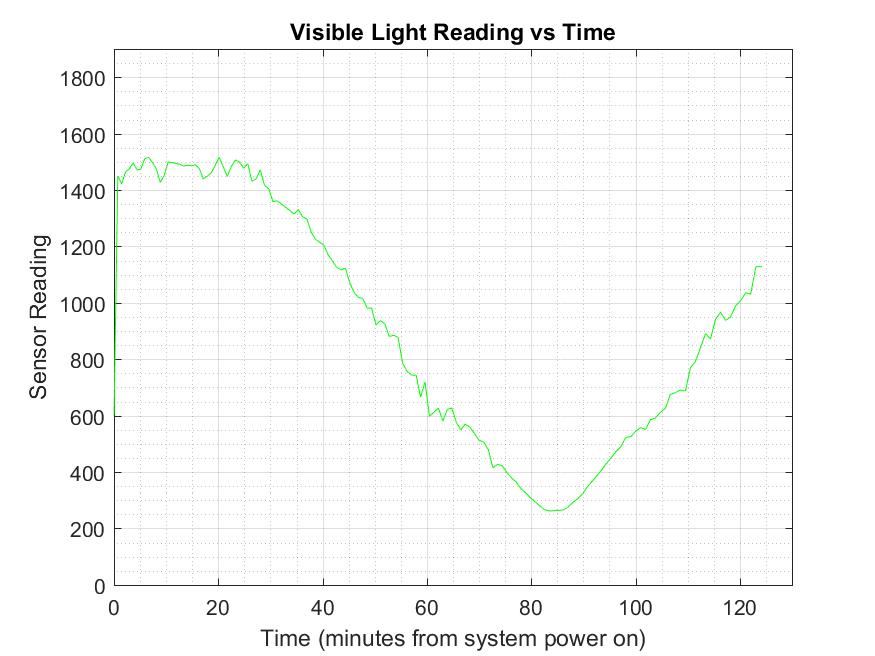
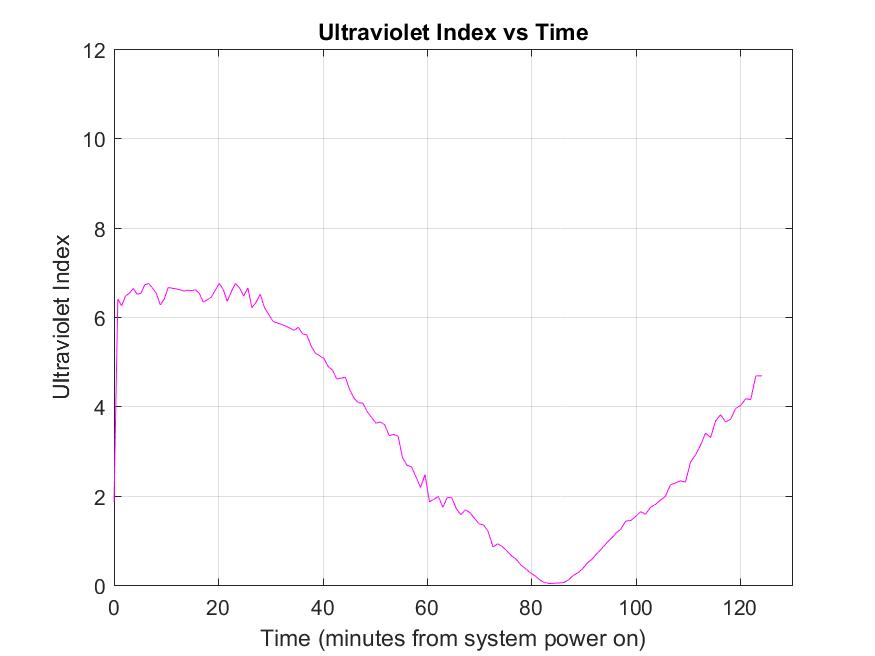
Below are some more graphs showing some of the interesting data we collected. Keep in mind that liftoff was around 19 minutes after the system was powered on. The totality occurred about 84 minutes after the system was powered on and lasted for about 2 minutes and 20 seconds.
|
|
|
|
|
|
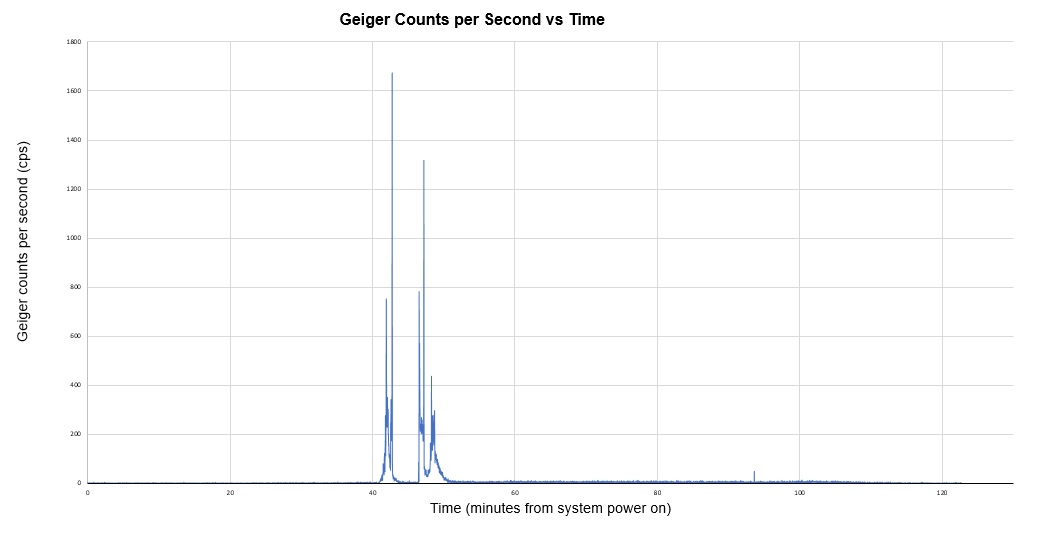 |
The UNLV balloon had two GoPro cameras during the eclipse flight: one facing down and another facing up and out. You can view the full video from the downward-facing camera here, and the video from the upward-facing camera here. Unfortunately, our cameras stopped filming about 40 minutes into the flight, before the totality. We are unsure why they stopped filming, but some of the team suspects the cameras overheated since at those high altitudes there is less ambient air around to exchange heat with the cameras, which were generating large amounts of heat from recording video at a high resolution. However, we ran the cameras at the same resolution during our practice launch without this problem, so I am not entirely confident that overheating caused the camera shutdown. The camera shutdowns also happen to occur around the same time as the two mysterious radiation spikes measured by the Geiger counter. Perhaps these radiation spikes adversely affected the cameras and caused them to shutdown.
While we didn’t get any pictures of the eclipse during totality from the balloon, we did get some nice pictures from the ground:
 |
Photo of the 2017 solar eclipse taken by Dr. Jeffrey Lacombe (UNR) with a telescope camera. |
|---|
 |
High-Altitude Balloon Team Nevada. |
|---|
Related products





-

Labor Day weekend sale
- 1 September 2017We are having a Labor Day sale all weekend long with site-wide discounts of up to 25%! Check out the sale page for more information. Please note...
-

New track sets and colorful Zumo sprockets
- 22 September 2017Pololu 22T Track Set – Red. We have replaced our original Pololu track sets with new versions featuring our newer style of spoked...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
