CHR-6dm Attitude and Heading Reference System

This IMU from CH Robotics is an Attitude and Heading Reference System (AHRS) that combines three gyro axes, three accelerometer axes, three magnetic compass axes, and a powerful 32-bit ARM Cortex on one tiny, 2.7g board. An on-board Extended Kalman Filter (EKF) handles the tricky data fusion problem, reporting yaw, pitch, and roll angles at up to 300 Hz over a simple TTL serial interface. The CHR-6dm provides built-in routines for gyro bias calibration, and PC software is available for automatic soft and hard iron magnetometer calibration. The Cortex’s programming pins are exposed, and the firmware is open-source.
| Description | Specs (9) | Pictures (4) | Resources (12) | FAQs (0) | On the blog (0) | Distributors (0) |
|---|
File downloads
-
CHR-6dm AHRS datasheet (489k pdf)
Datasheet for the CHR-6dm attitude and heading reference system (AHRS).
-
CHR-6dm AHRS Interface PC application (267k zip)
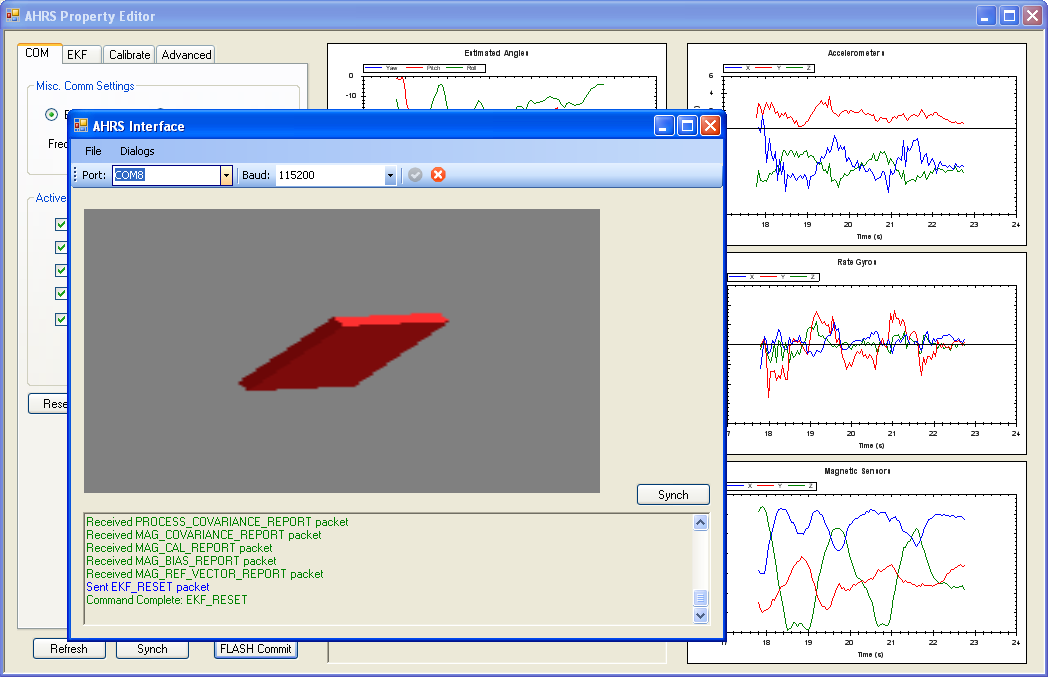
Windows application for configuring the CHR-6dm AHRS over a serial port and displaying data from the module in real-time.
Note: this software requires the latest version of DirectX.
AHRS Interface PC software for the CHR-6dm AHRS IMU.
-
CHR-6dm AHRS firmware v1.0 (630k zip)
Firmware for the CHR-6dm AHRS (version 1.0). CHR-6dm firmware by CH Robotics is licensed under a Creative Commons Attribution-Share Alike 3.0 United States License
-
CHR-6dm AHRS PC application source code (1MB zip)
Source code (Visual C# project) for the AHRS PC software used to configure the CHR-6dm AHRS and display data from it in real-time. CHR-6dm configuration software by CH Robotics is licensed under a Creative Commons Attribution-Share Alike 3.0 United States License
-
LPR510AL datasheet (226k pdf)
Datasheet for the ST LPR510AL MEMS motion sensor: dual axis pitch and roll ±100°/s analog output gyroscope.
-
LY510ALH datasheet (217k pdf)
Datasheet for the ST LY510ALH MEMS yaw-rate gyroscope.
-
ADXL335 datasheet (427k pdf)
Datasheet for Analog Device’s ADXL335 3-axis accelerometer.
-
HMC5843 datasheet (624k pdf)
Datasheet for the Honeywell HMC5843 3-axis digital magnetic compass.
Recommended links
-
STM32F103T8
Datasheet and other downloads for the STM32F103T8 Cortex M3 processor.
-
CHR-6dm magnetometer soft and hard iron calibration
Video demonstrating how to calibrate the magnetometer on the CHR-6dm AHRS to correct hard and soft iron distortions in the magnetic field.
-
CHR-6dm yaw angle calibration
Video showing how set the zero yaw reference on the CHR-6dm AHRS.
-
CHR-6dm pitch and roll angle calibration
Video showing how to set the accelerometer reference vector on the CHR-6dm AHRS.
Related products









Related categories



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
