Support » Controlling devices with the serial port and writing graphical interfaces »
6. Compiling and running the program
 |
Instructions for compilation are defined in the Makefile.
Type make and all of the C files will be combined into a
shared object (or DLL) called ssctester.so. Since there
is no main function, this is not a program you can run by
yourself, just a library of functions that will be used by ssc-tester.tcl. That file is a script, which means that
it is interpreted on the fly and does not need to be compiled. To run
it, type
wish ssc-tester.tcl
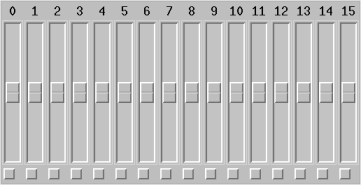
and a window with 16 sliders should appear. Connect the servo controller and a servo, then try moving the sliders to see if it works!


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









