Support » Tamiya “Toy” Motor Testing by Adam Borrell (a.k.a nexisnet) »
1. Introduction and Experimental Setup
This information has been copied from Adam’s thread Tamiya ‘toy’ motor testing on the Pololu robotics forum.
A lot of people, myself included, are interested in just how high you can push the voltage on the motors in the small Tamiya gearboxes. I would be happy to halve the operating life of my gearbox if it means being able to run the motors faster, especially if I can run them straight from a greater-than-5V battery pack, so long as that half-life is still longer than I plan on using the motor. Lets say 20 hours of continuous operation would make me happy, and 50 would make me very happy.
Unfortunately, since these are small ‘toy’ motors, the manufacturer really doesn’t offer any cycle-life numbers, even when operating the motor at the recommended 3V or less. I happen to have a bunch of Mabuchi FA-130s around, those are the motors that the 70168 Double Gearbox, 70167 Single Gearbox, 70097 Twin-Motor Gearbox, 70093 3-Speed Crank-Axle Gearbox, 70110 4-Speed Crank-Axle Gearbox, and 70103 Universal Gearbox are based on. Recently I’ve been doing a little testing with these motors, basically I’ve been running them into the ground…in a controlled, pseudo-scientific way of course:
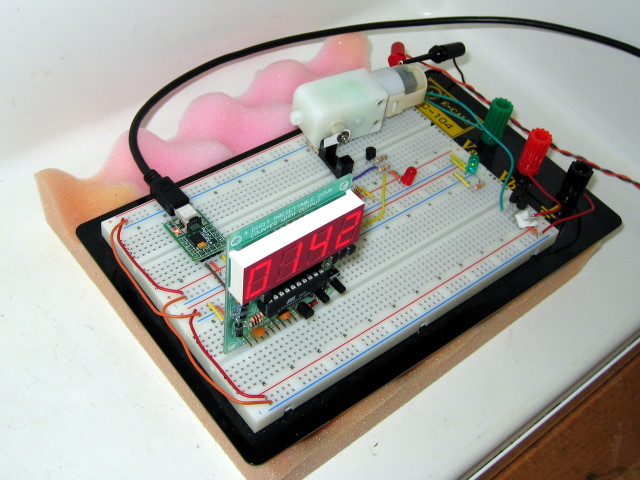 |
For light loading and downgearing, I’m fitting the test motors into the Solarbotics GM9 gearbox (143:1 reduction). The gearbox output shaft is turning a piece of card-stock which interrupts a photo-gate once per revolution. It looks like the gearbox is just sitting there, but I super-glued it to a chip socket so it presses in place on the breadboard. The photo-gate interruptions are counted by an ATTiny2313, which drives an LED display (readout in RPM) and transmits the speed readings over a serial connection to a laptop. The motors will all be driven in the same direction at a constant voltage, straight from a regulated DC power supply, working only against the internal resistance of the gearbox.
The first thing I noticed is that running the motor way over the recommended voltage makes it even more loud and annoying than these gearboxes normally are, which might be a consideration for some robots. To keep from driving myself crazy, I’m conducting these experiments with the breadboard on a piece of foam inside a (room temperature) minifridge (it REALLY helps!).
 |
The second thing I noticed about overpowering these motors was that they generate some horrendous electronic interference. The motor is powered from an isolated output of my power supply, and I added capacitors across the motor leads, but the USB-Serial adapter kept flaking out whenever I was running the motor (the LED would flicker and my laptop would stop receiving data). I even tried surrounding the adapter in grounded foil, but I eventually had to cut it out of the setup. Instead I ran the TTL serial TX line from the ATTiny through a logic inverter and into my laptop’s serial port. Neither the inverter chip nor the AVR seem affected by the interference, but still watch out (and use those capacitors!).
Related products














Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
