Support » Pololu Maestro Servo Controller User’s Guide » 4. Using the Maestro Control Center »
4.a. Status and Real-time Control
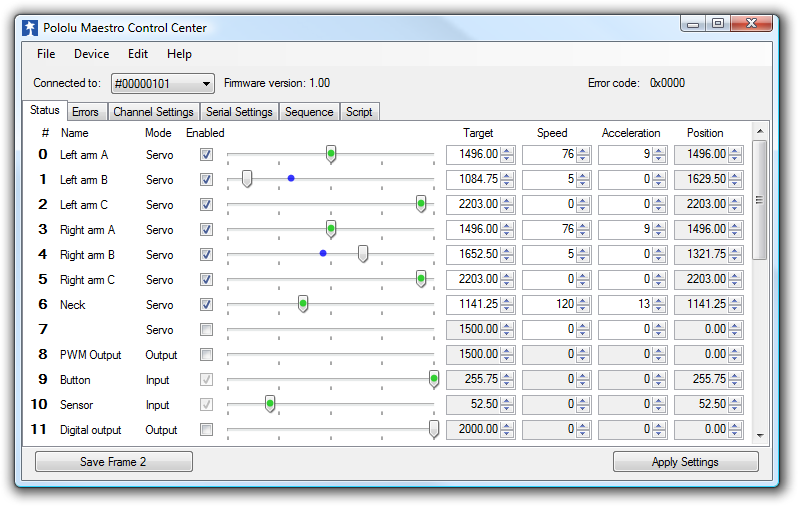 |
The Status tab in the Maestro Control Center. |
|---|
The Status tab is used for controlling the Maestro’s outputs and for monitoring its status in real time. A separate row of controls is displayed for each of the Maestro’s channels. In the screenshot above, there are 12 channels displayed because the Maestro Control Center is connected to the Mini Maestro 12-channel servo controller. When the Maestro Control Center connects to Maestro models with more or fewer channels, it displays more or fewer channels on the screen.
For a channel configured as a servo or output, the checkbox enables the output, dragging the slider adjusts the target setting of the channel, and the green ball indicates the channel’s current position. For example, if the channel is set to a relatively slow speed, when the slider is moved to a new position, the green ball will slowly move until it has reached the slider, indicating that the output has reached its target. For more precise control, a target value may also be entered directly into the “Target” input box. The slider is automatically scaled to match the minimum and maximum values specified in the Channel Settings tab, which is described in Section 4.b.
For a channel configured as input, the slider, green ball, “Target”, and “Position” display the current value of the input. There is no control available for inputs. The inputs on channels 0–11 are analog: their values range from 0 to 255.75, representing voltages from 0 to 5 V. The inputs on channels 12–23 are digital: their values are either exactly 0 or exactly 255.75.
The “Speed” and “Acceleration” inputs allow the speed and acceleration of individual servo channels to be adjusted in real time. The default values are specified in the Channel Settings tab, but it can be useful to adjust them here for fine-tuning.
All of the controls on this tab always display the current values as reported by the Maestro itself, so they are useful for monitoring the actions caused by another program or device. For example, if a microcontroller uses the TTL serial interface to change the speed of servo channel 2 to a value of 10, this value will be displayed immediately in the corresponding input, even if something else was formerly entered there.
PWM Output (Mini Maestro 12, 18, and 24 only)
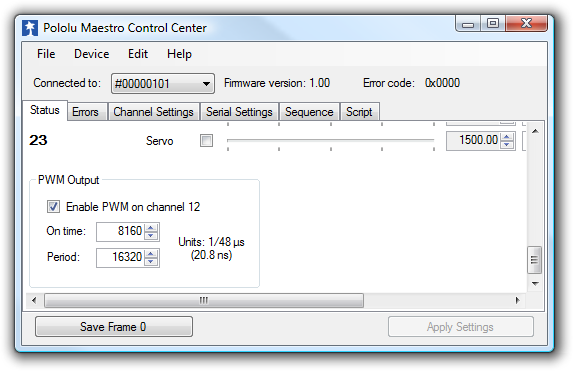 |
The PWM Output control in the Status tab in the Maestro Control Center (only available on the Mini Maestro 12, 18, and 24). |
|---|
On the Mini Maestro 12, 18, and 24, one of the channels may be used as a general-purpose PWM output with a frequency from 2.93 kHz to 12 MHz and up to 10 bits of resolution. This could be used, for example, as an input to a motor driver or for LED brightness control. The PWM output is on channel 8 for the Mini Maestro 12 and on channel 12 for the Mini Maestro 18 and 24. This channel must be configured as an output for PWM to be available.
You may use the PWM Output control at the bottom of the Status tab to test out PWM, by checking the checkbox and entering specific values for the on time and period, in units of 1/48 μs. A period of 4800, for example, will generate a frequency of 10 kHz. The resolution on these values depends on the period as shown in the table below:
| Period range |
Period resolution |
On-time resolution |
|---|---|---|
| 1–1024 | 4 | 1 |
| 1025–4096 | 16 | 4 |
| 4097–16384 | 64 | 16 |
The special periods 1024, 4096, and 16384 are not recommended, since 100% duty cycle is not available at these values. If the on time is set equal to the period at one of the special values, the duty cycle will be 0% (a low output). The periods 1020 (47.1 kHz), 4080 (11.7 kHz), and 16320 (2.9 kHz) provide the best possible resolution with 100% and 0% duty cycle options, so you should use one of these periods if possible.
You will probably want to use serial commands or a script to make use of PWM in your project. See Section 5.e and Section 6.b for more information.
Related products










Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
