

This is a merged information page for Item #3575.
View normal product page.
Pololu item #:
3575
Brand:
Pololu
Status:
Active and Preferred

Build your very own programmable balancing robot with the Balboa 32U4 robot kit! The Balboa control board features an Arduino-compatible ATmega32U4 MCU, motor drivers, quadrature encoders, and a full IMU. This board also has the ability to interface with a Raspberry Pi, making the foundation for a complete Raspberry Pi-controlled balancing robot. Motors and wheels are not included: choose your wheels and motors to personalize your robot.
 Compare all products in Balboa Robot and Accessories or Raspberry Pi Expansion Boards or Robot Kits with Soldering.
Compare all products in Balboa Robot and Accessories or Raspberry Pi Expansion Boards or Robot Kits with Soldering.
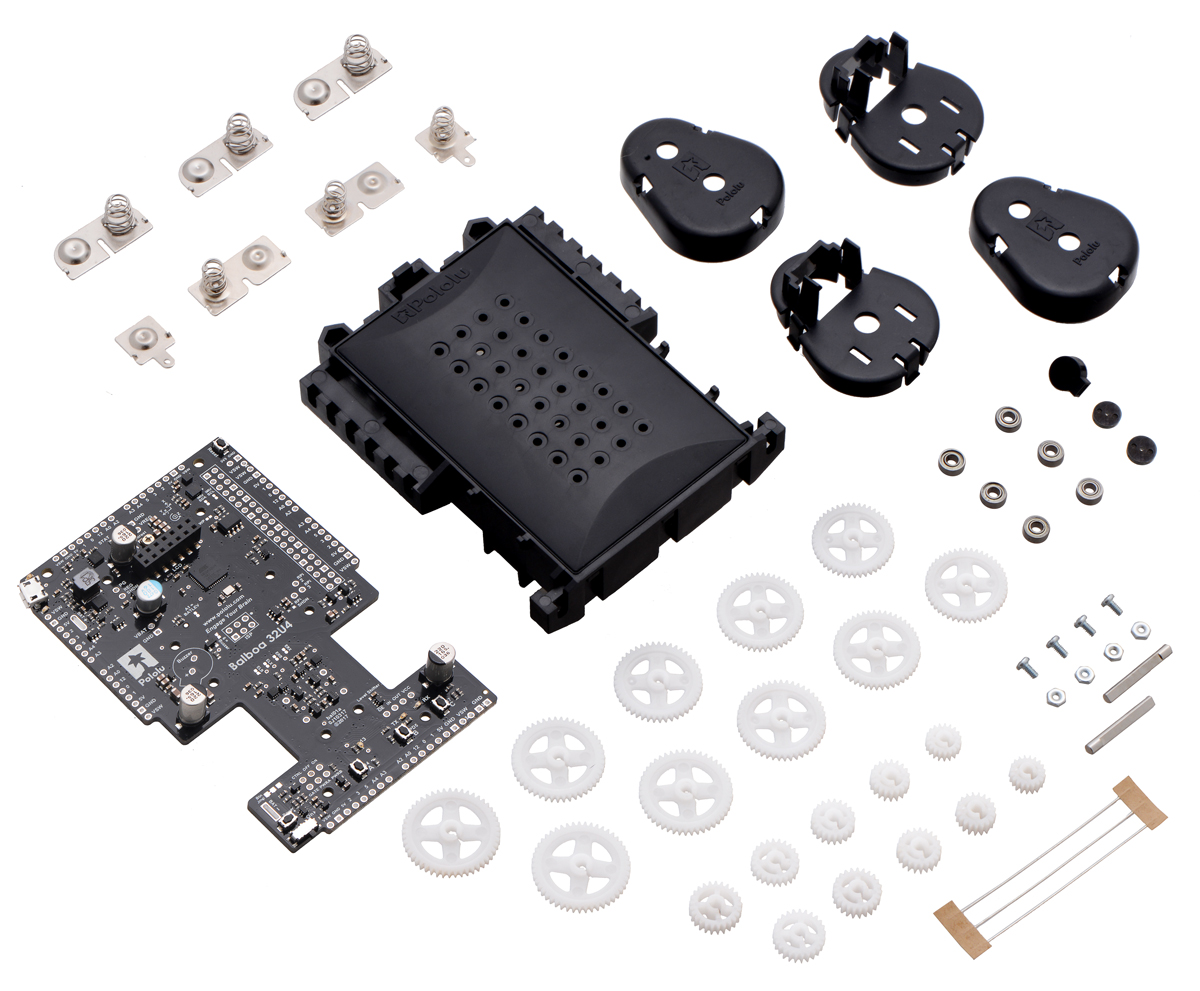 |
Balboa 32U4 Balancing Robot Kit components (wheels and motors are not included). |
|---|
 |
Bumper Cage Kit for Balboa 32U4 Balancing Robot. |
|---|
|
One of the many possible configurations of the bumper cage on the Balboa 32U4 Balancing Robot. |
|---|
 |
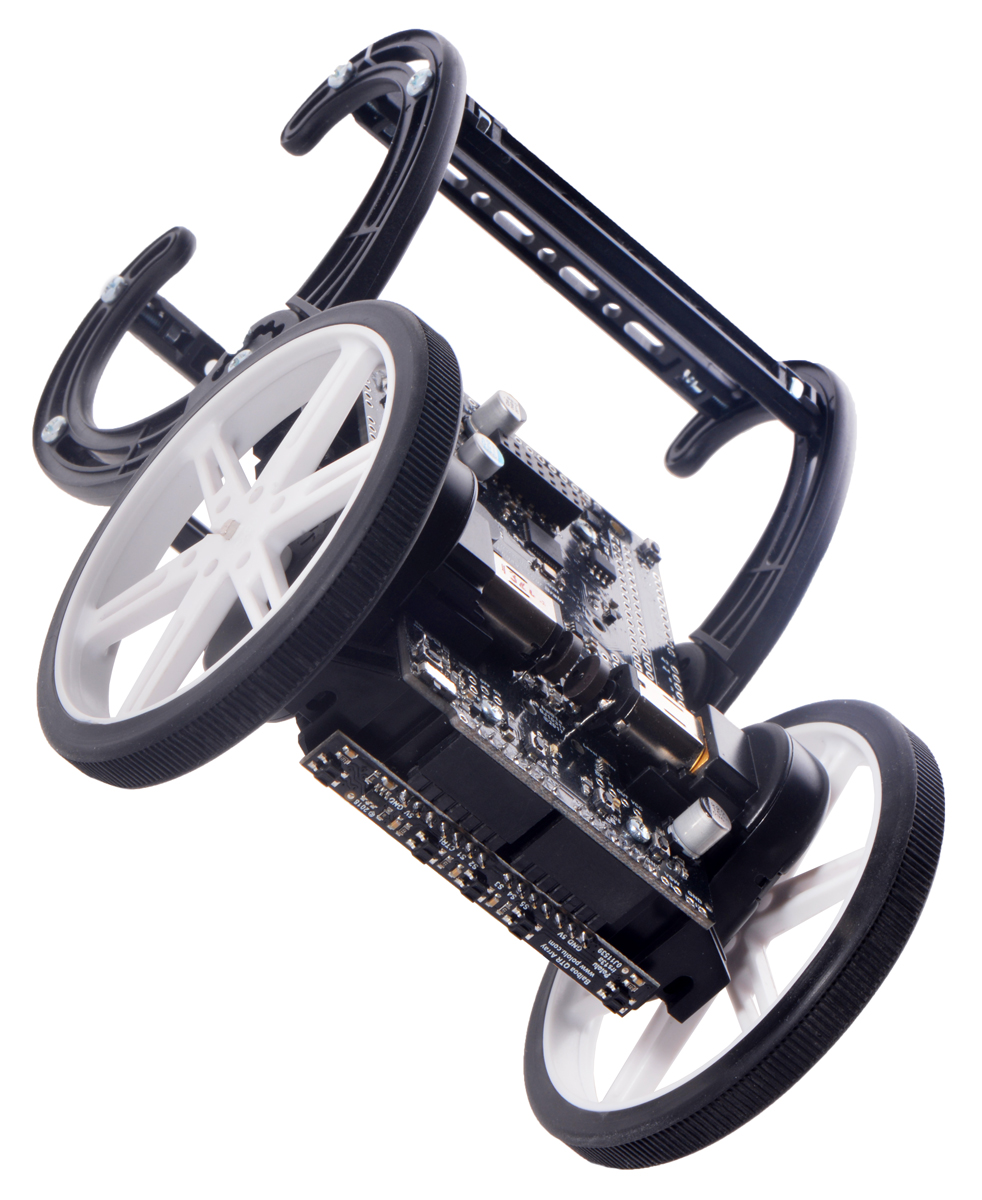
The Balboa 32U4 can drive around on its side while resting on the bumper cage skids. |
|---|
 |
One of the many possible configurations of the bumper cage on the Balboa 32U4 Balancing Robot. |
|---|
 |
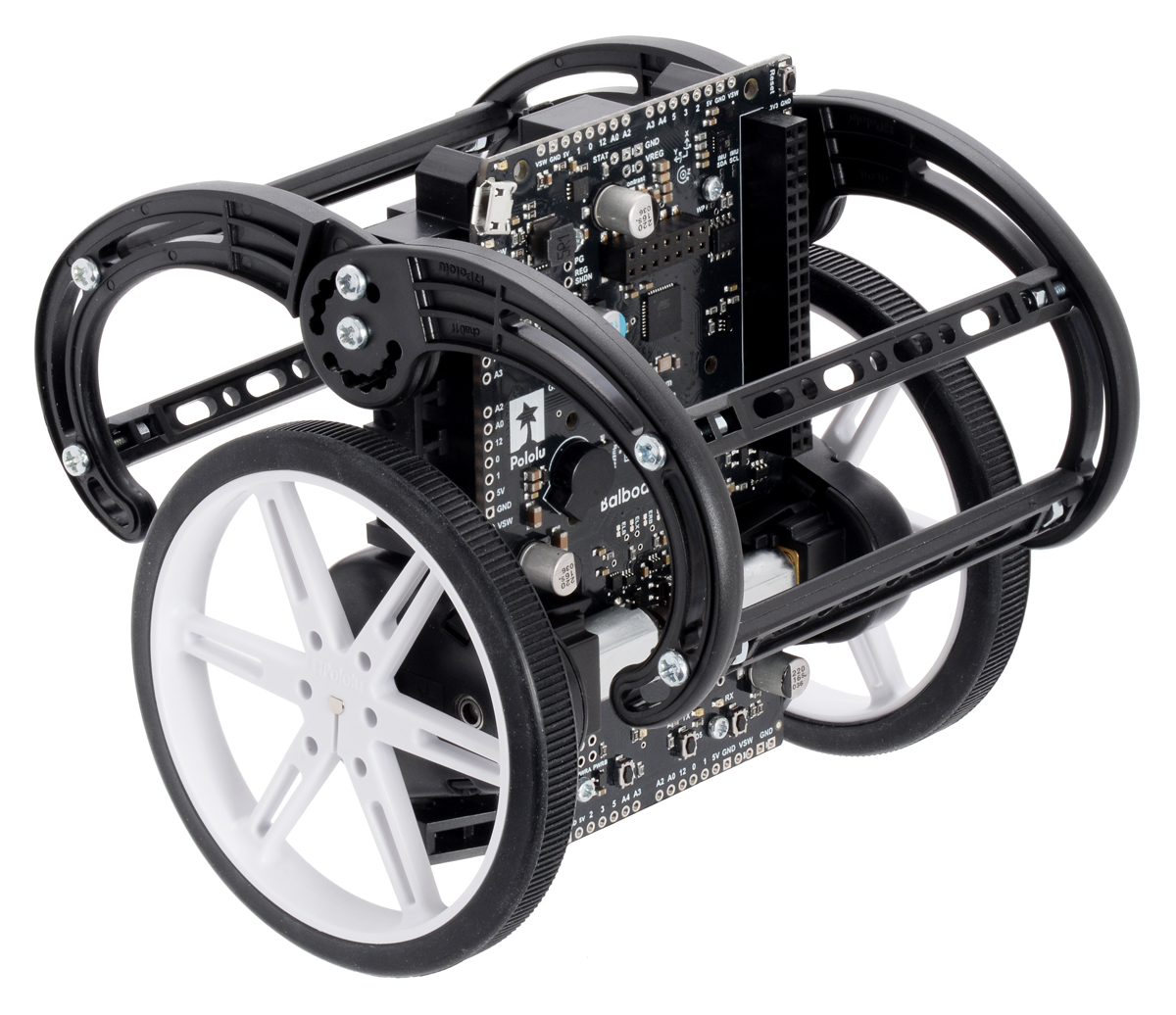
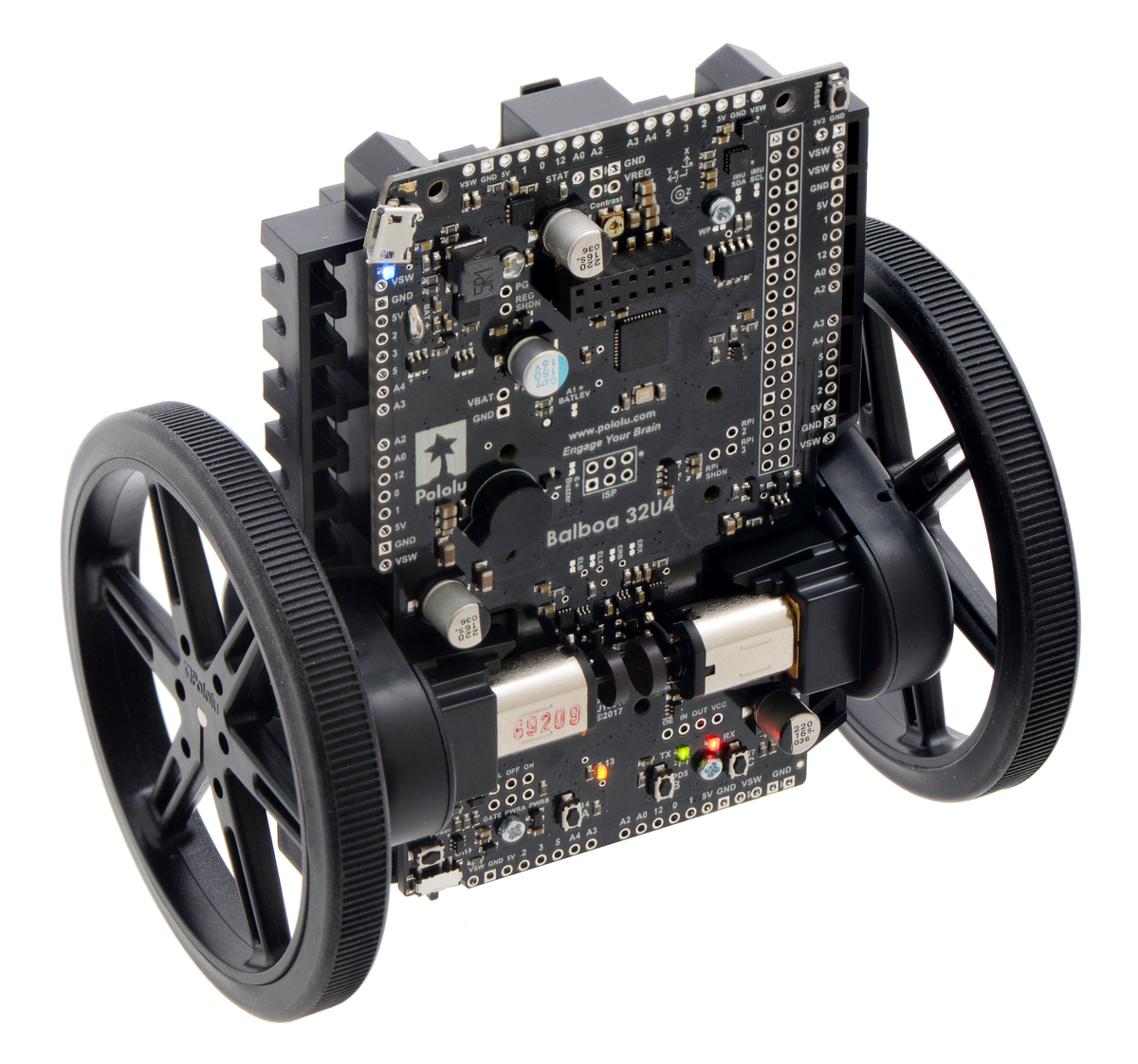
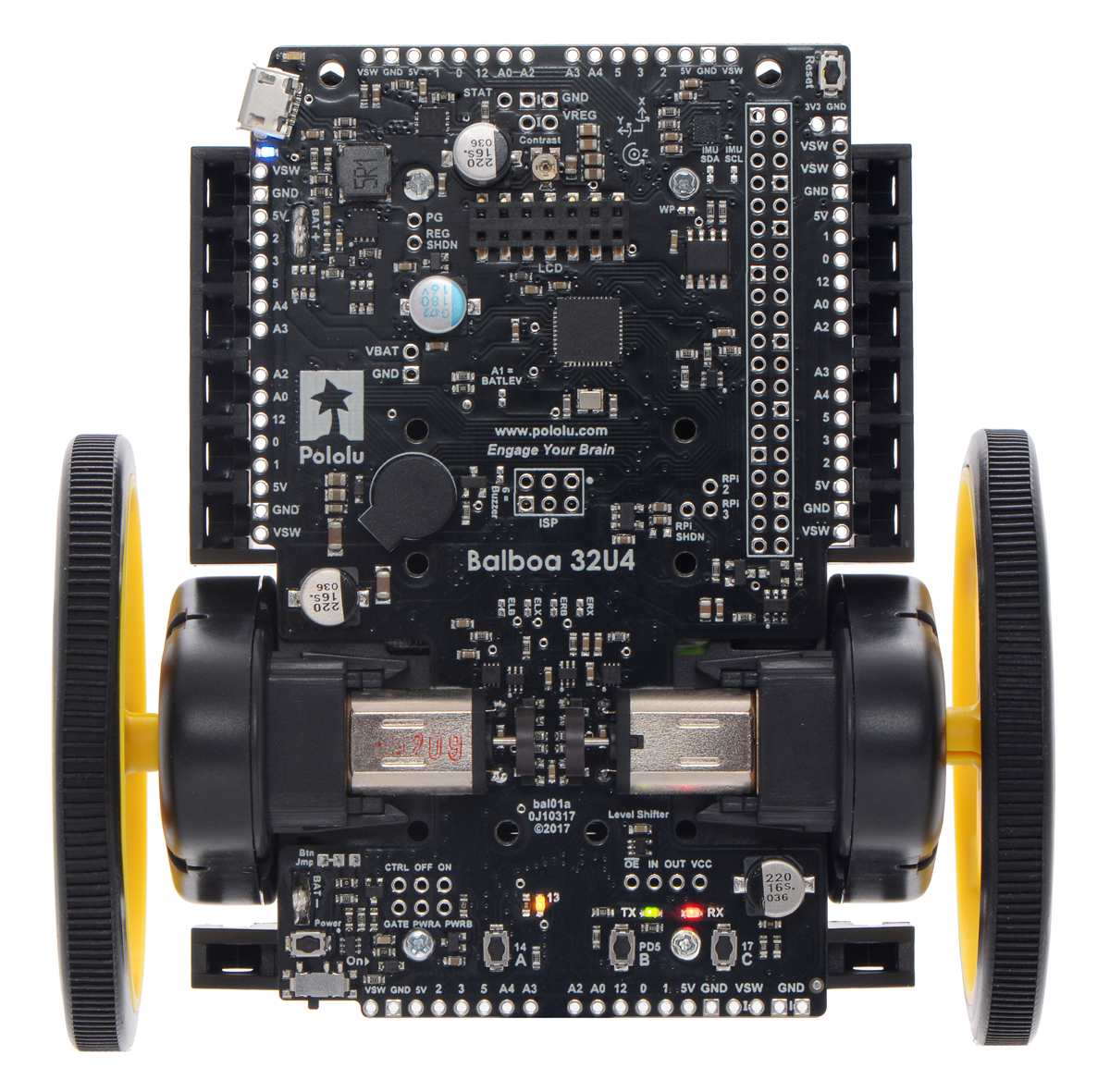
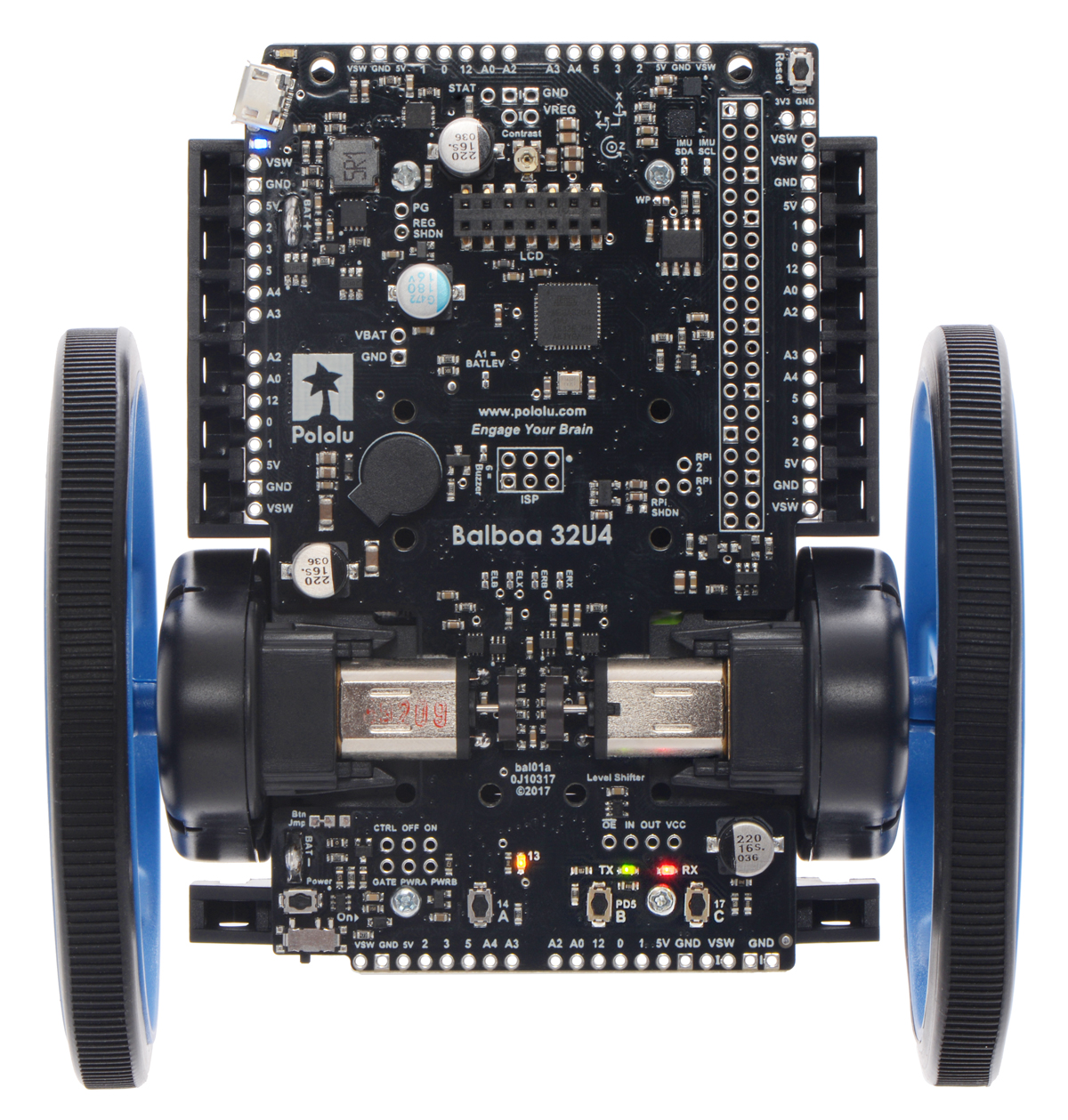
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
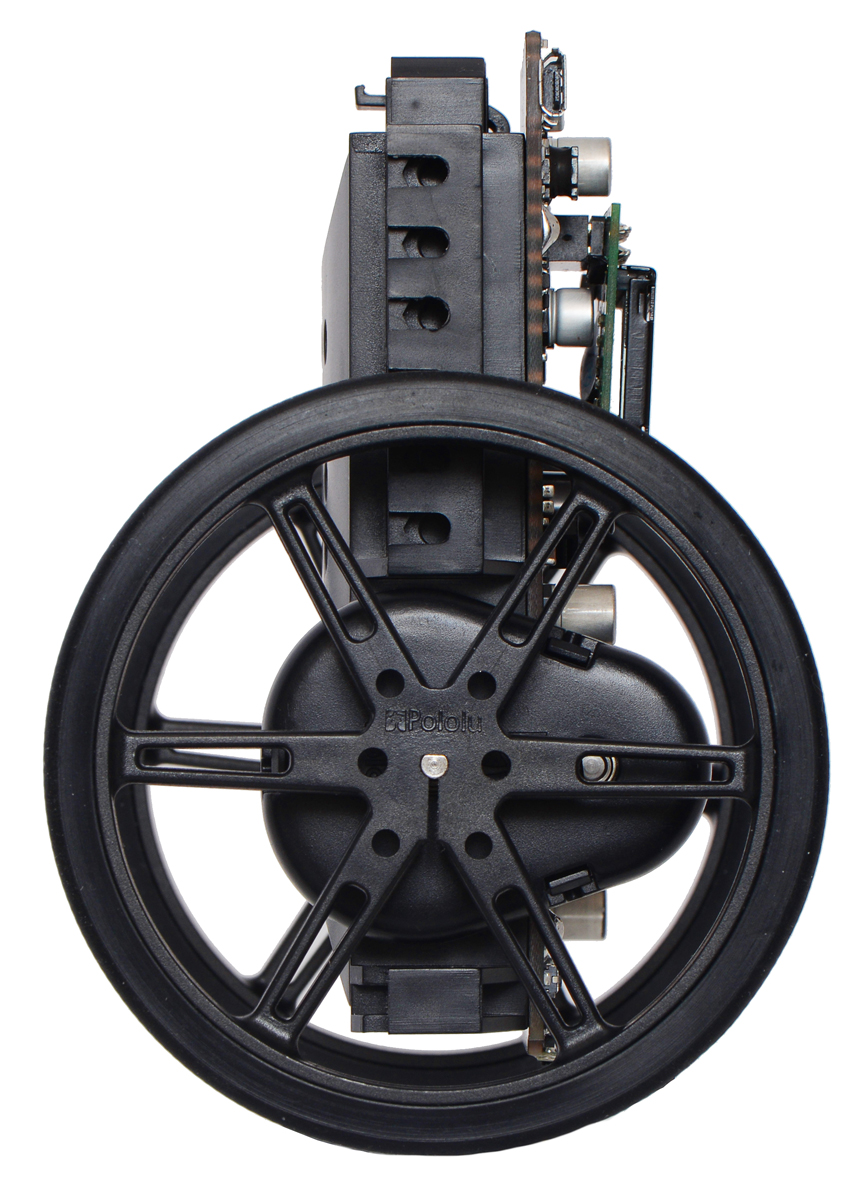
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
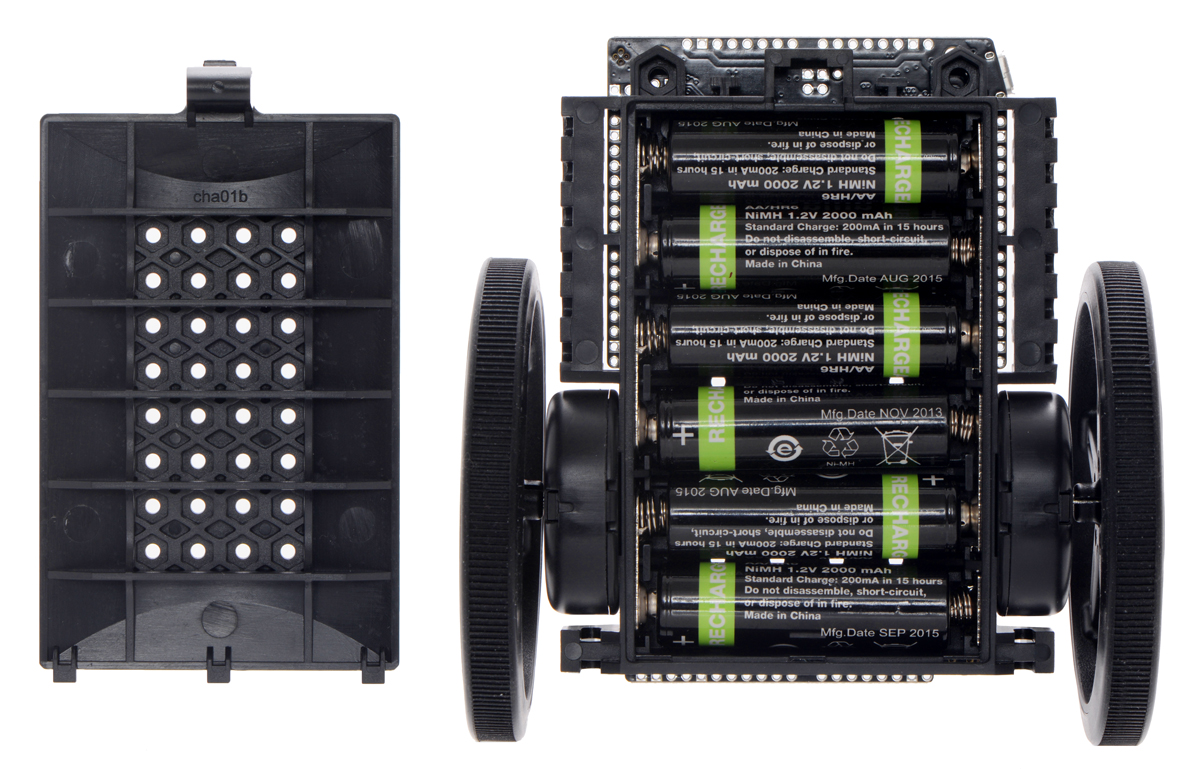 |
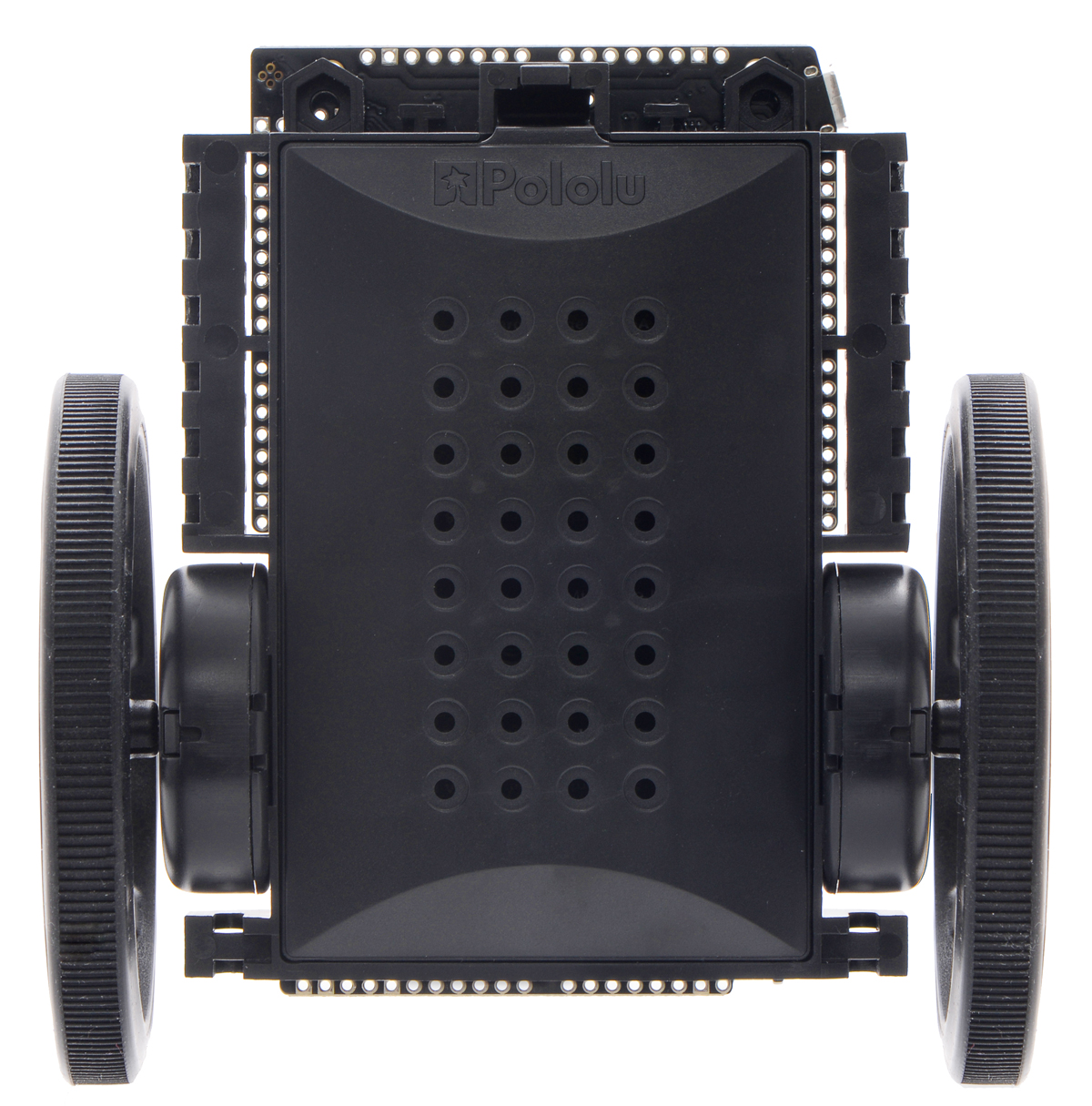
Balboa 32U4 Balancing Robot with battery cover removed. |
|---|
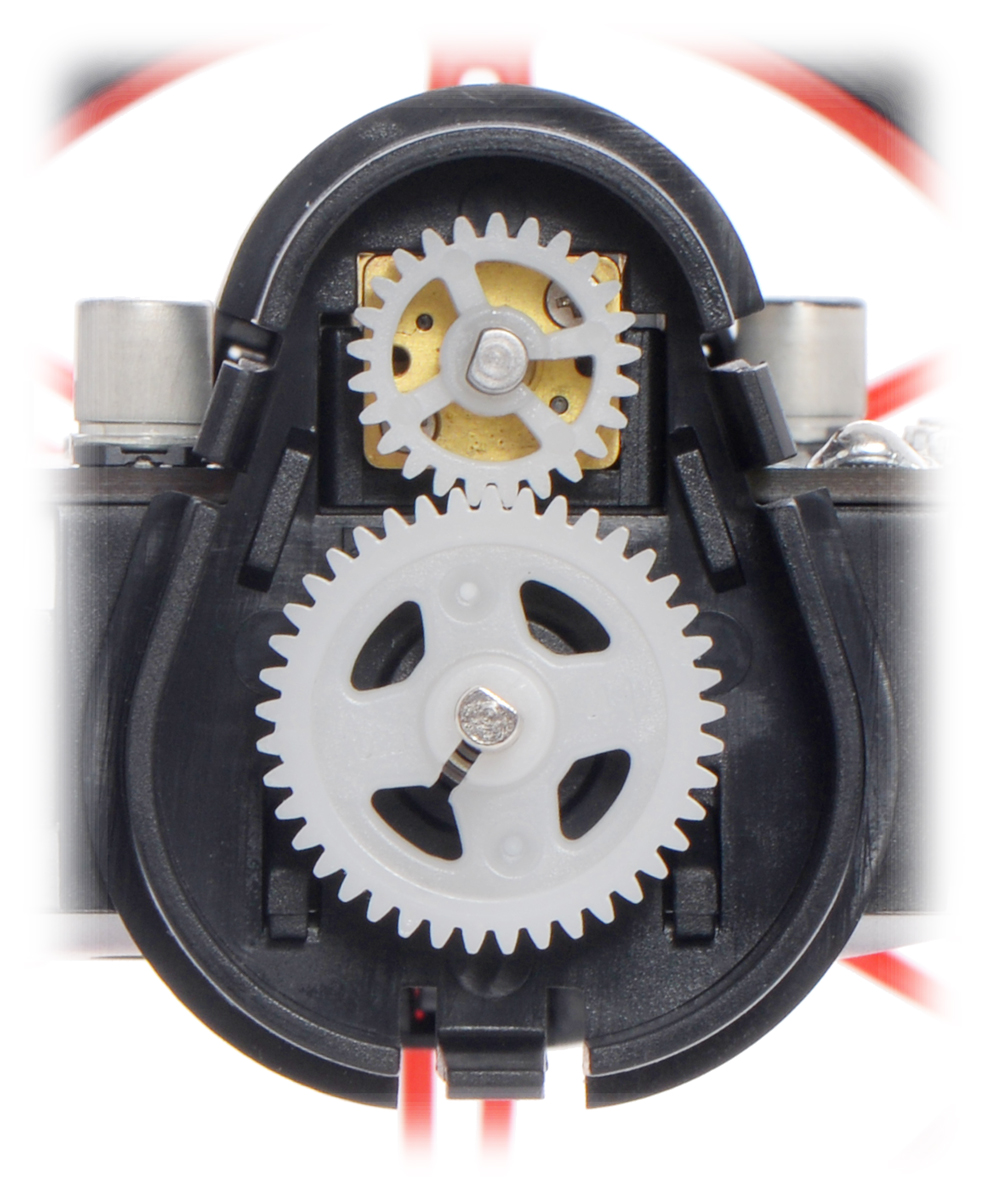 |
A look inside the external gearbox on the Balboa 32U4 Balancing Robot. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and LCD. |
|---|
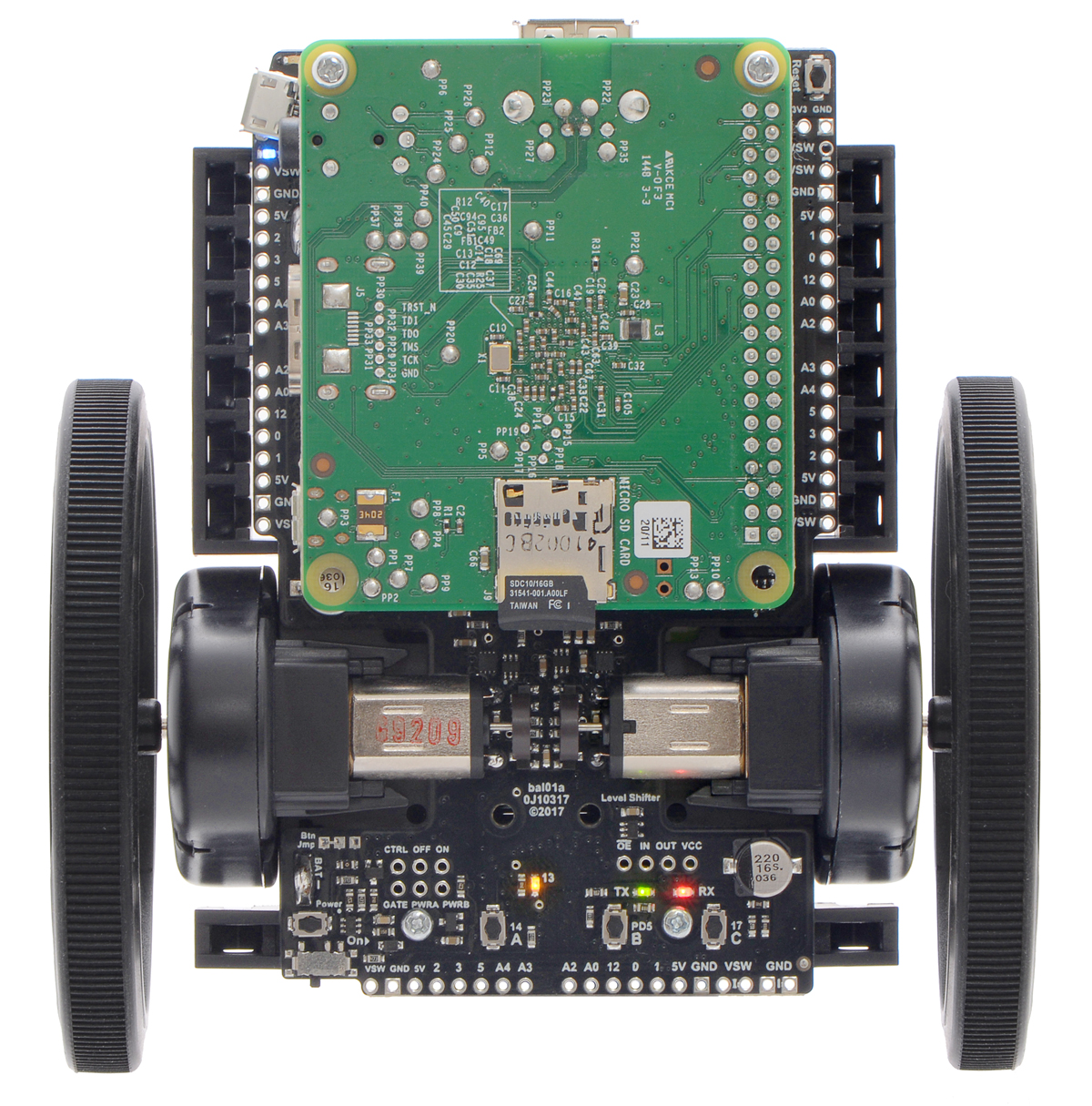 |
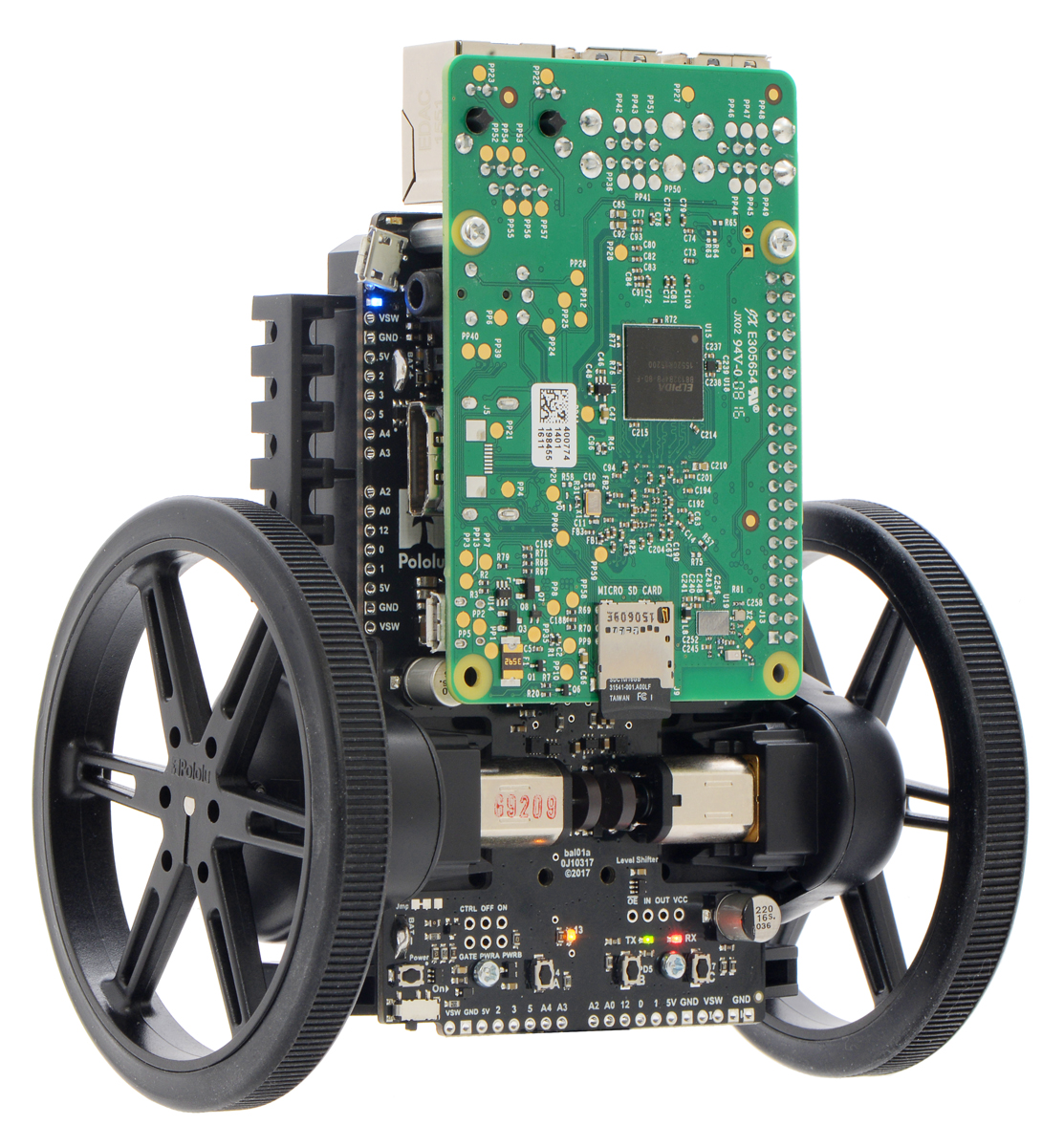
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 1 Model A+. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 3 Model B. |
|---|
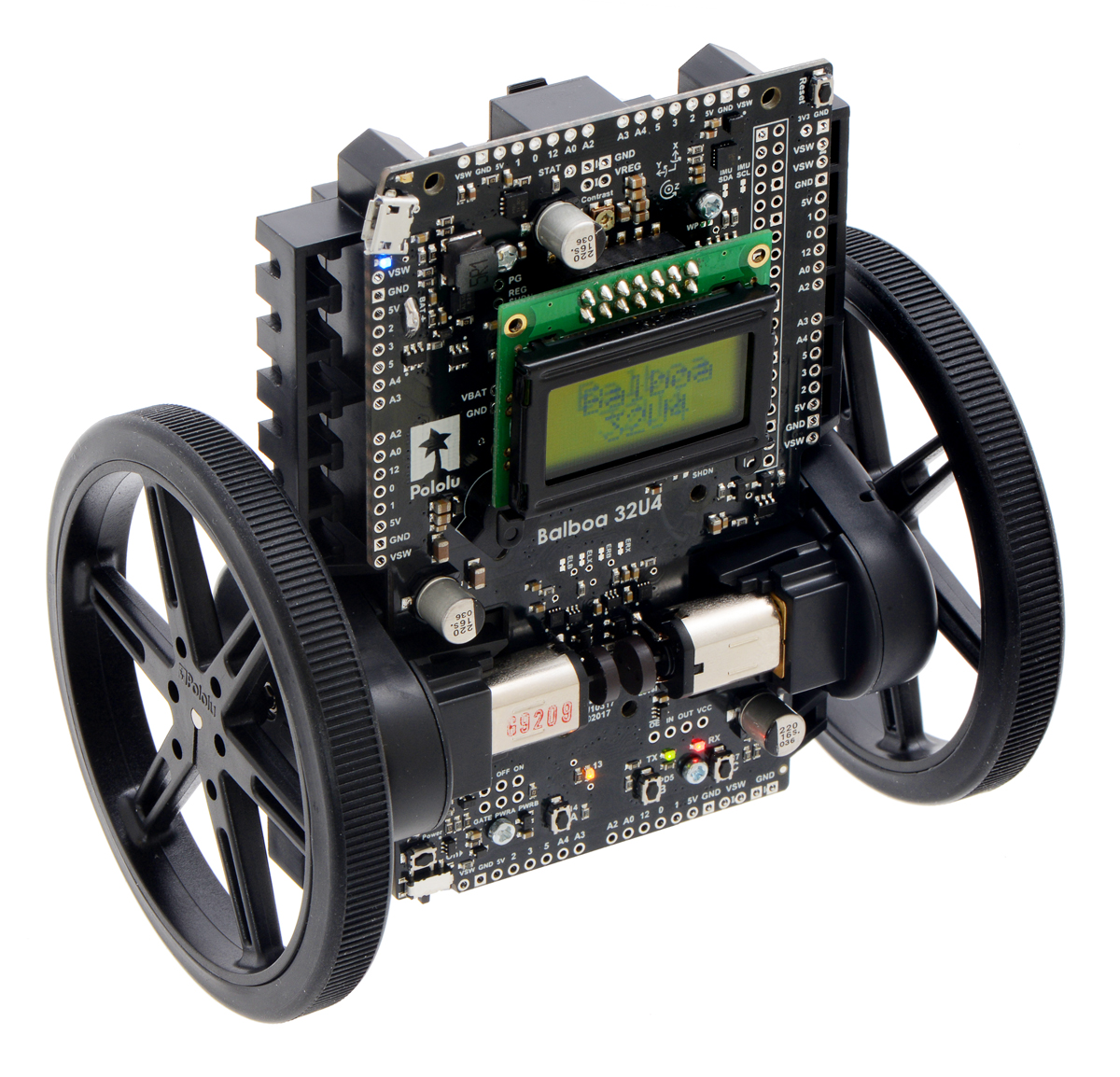 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and LCD. |
|---|
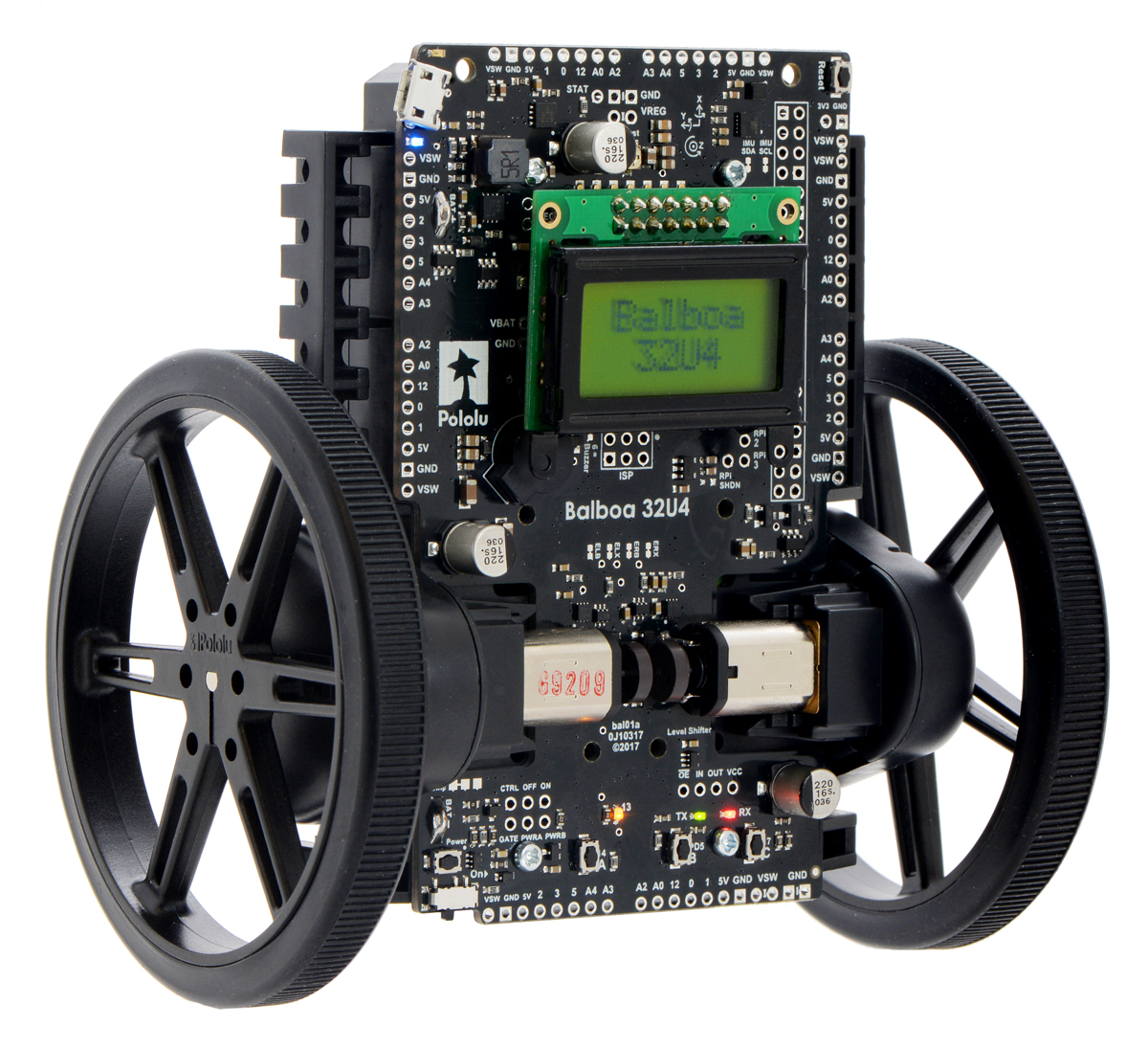 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and LCD. |
|---|
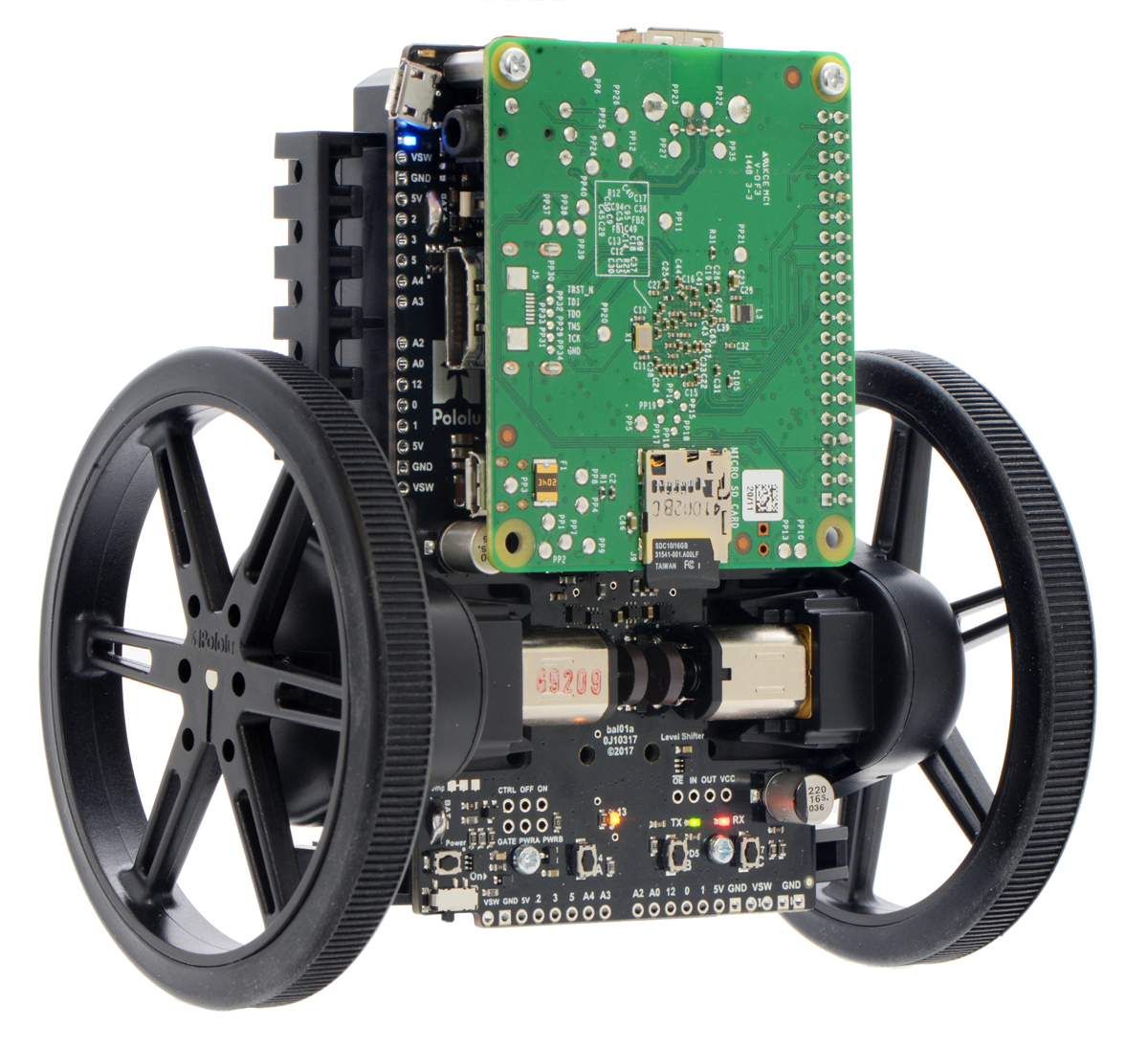 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 1 Model A+. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 3 Model B. |
|---|
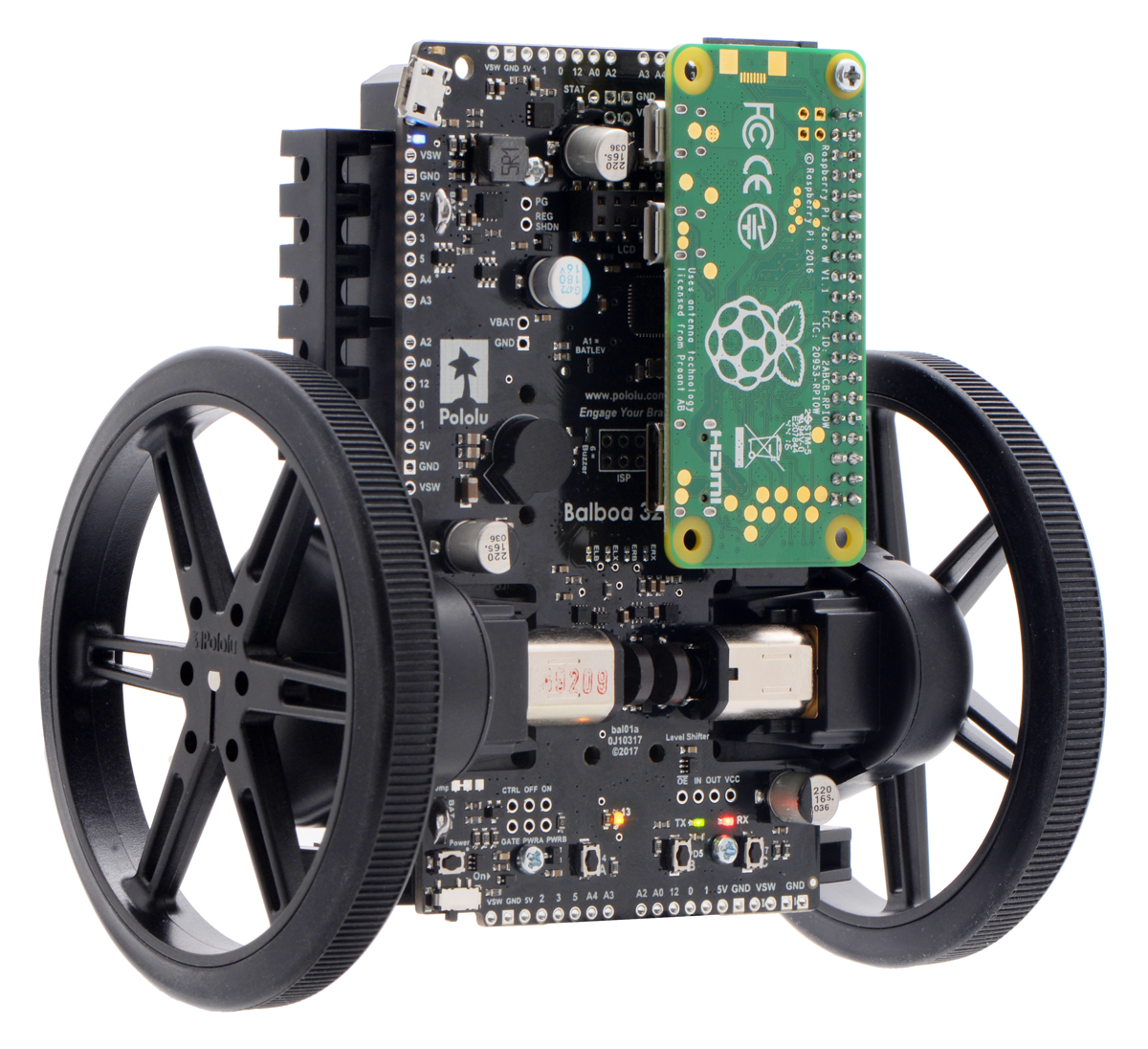 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi Zero W. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and LCD. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and 3D-printed arms. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and 3D-printed arms. |
|---|
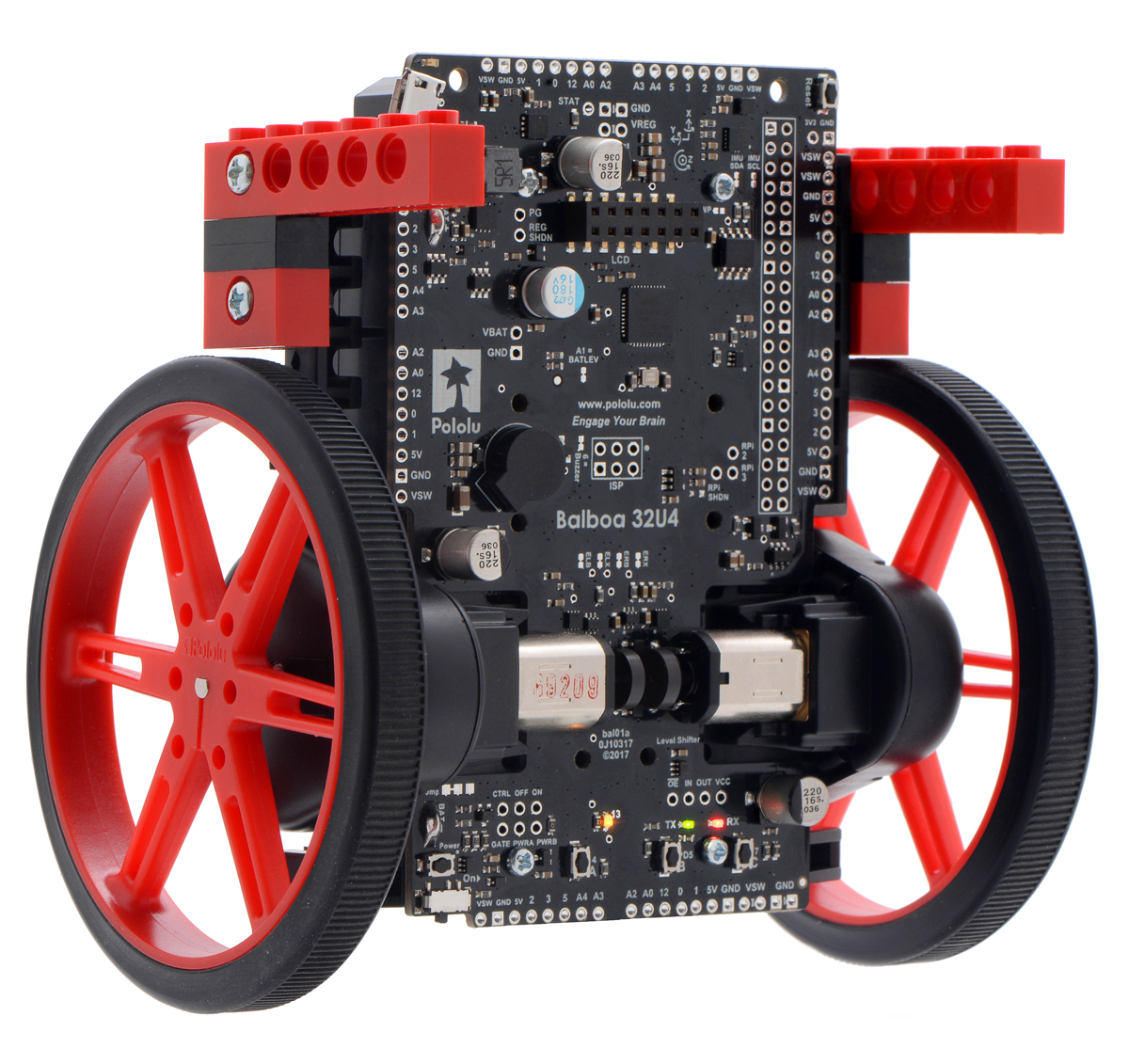 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and arms made from LEGO blocks. |
|---|
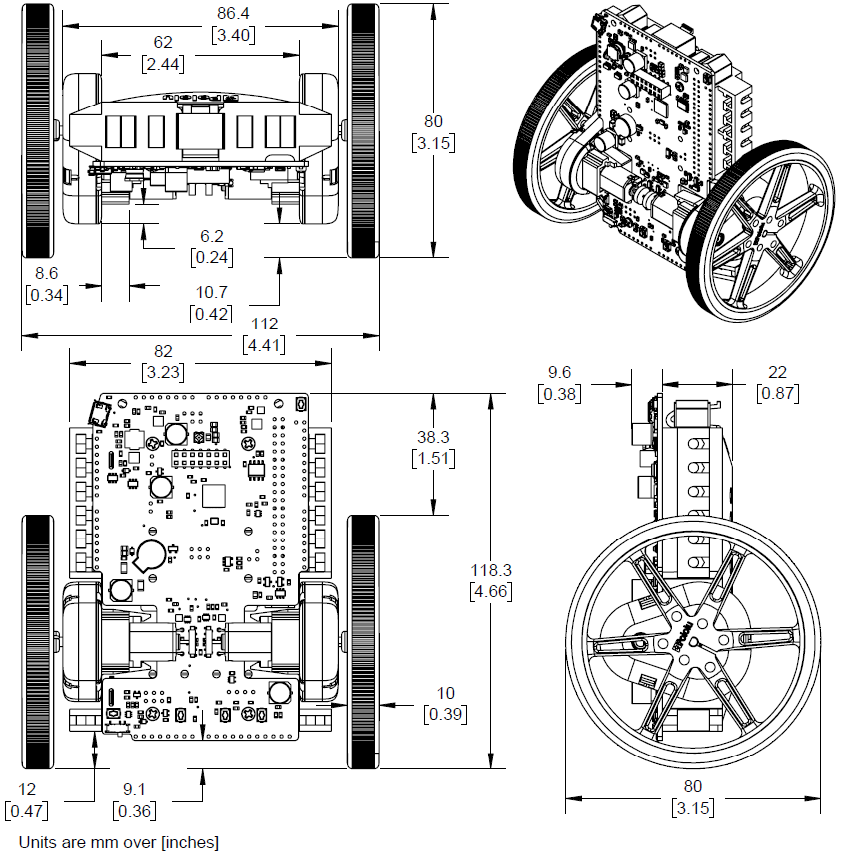 |
Dimensions of the Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 70×8mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 90×10mm wheels. |
|---|
 |
Balboa encoder, showing the magnetic disc and sensors (with one motor removed). |
|---|
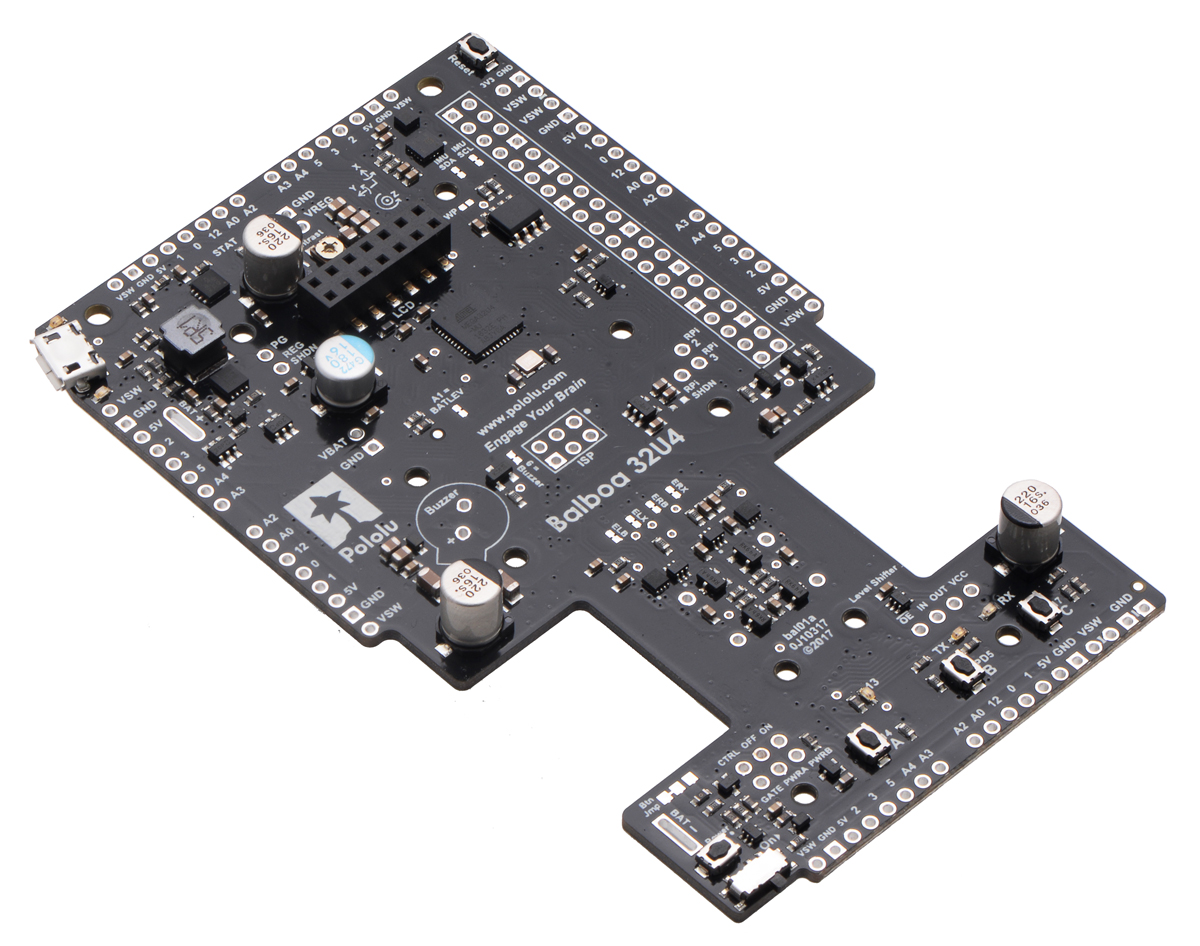 |
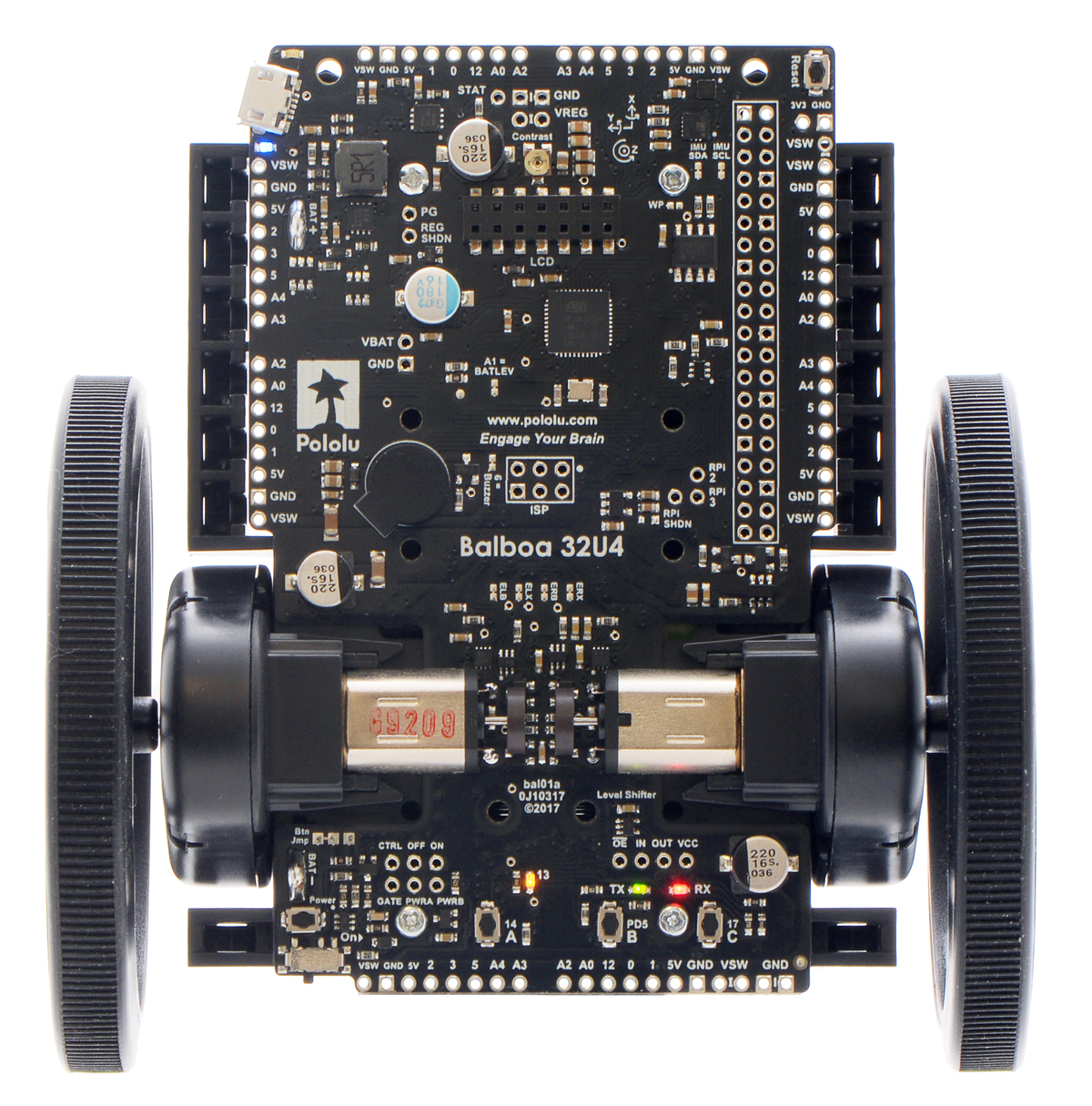
Balboa 32U4 Balancing Robot control board. |
|---|
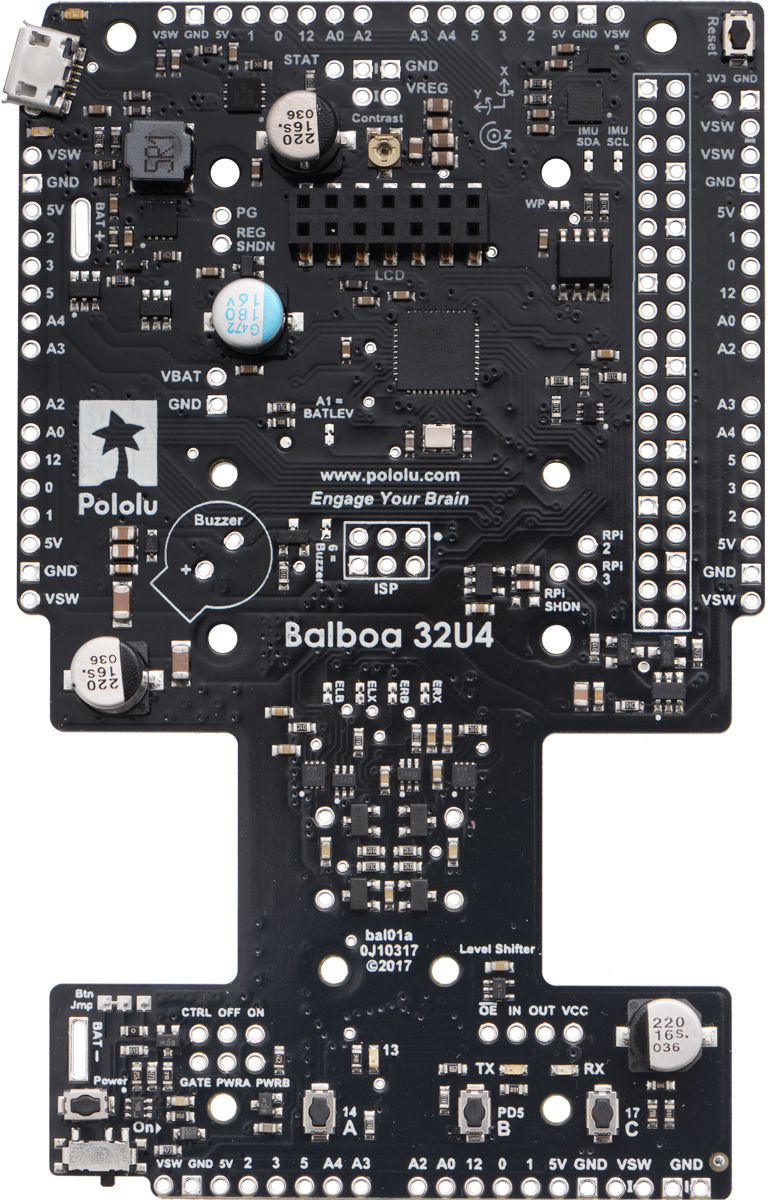 |
Balboa 32U4 Balancing Robot control board. |
|---|
 |
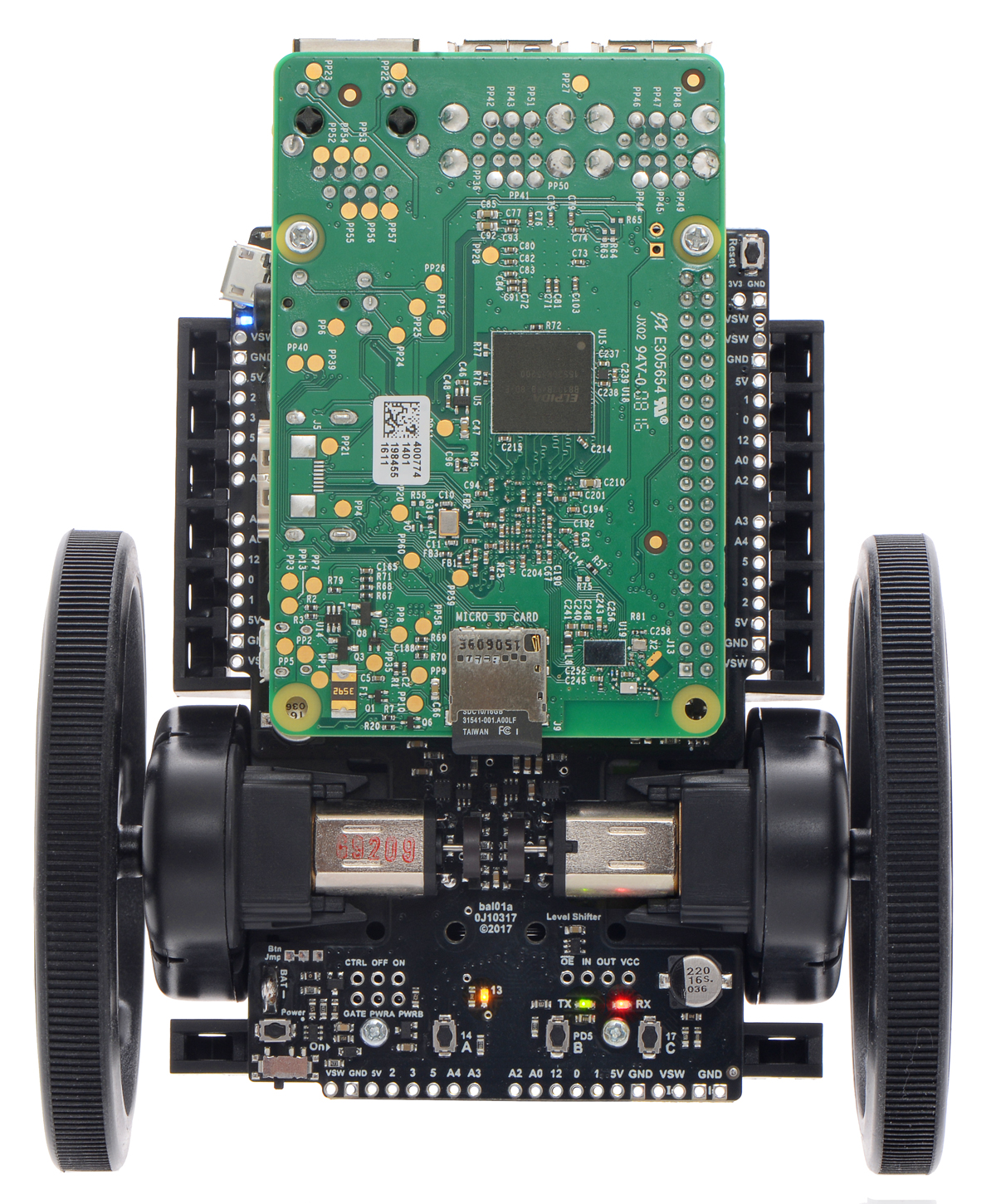
Balboa 32U4 Balancing Robot control board, bottom view. |
|---|
 |
The Balboa 32U4’s IMU and compass chips. |
|---|
 |
Animated gif of a Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Animated gif of Balboa demonstrating “popping up”. |
|---|
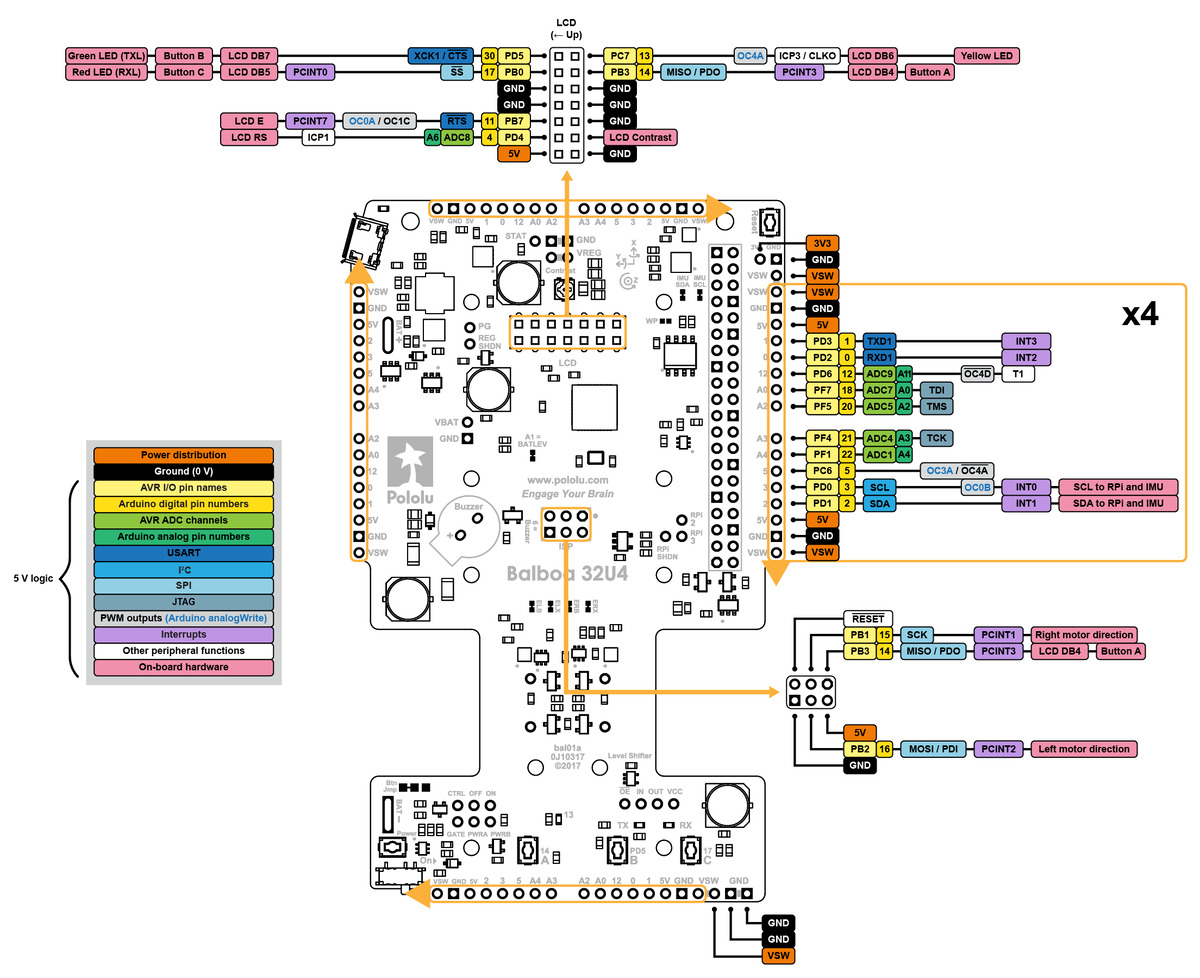 |
Pinout diagram of the Balboa 32U4 control board (ATmega32U4 pinout and peripherals). |
|---|
 |
Pinout diagram of the Balboa 32U4 control board (Raspberry Pi pinout and peripherals, level shifter, and board power control). |
|---|
 |
Power distribution diagram of the Balboa 32U4 control board. |
|---|
 |
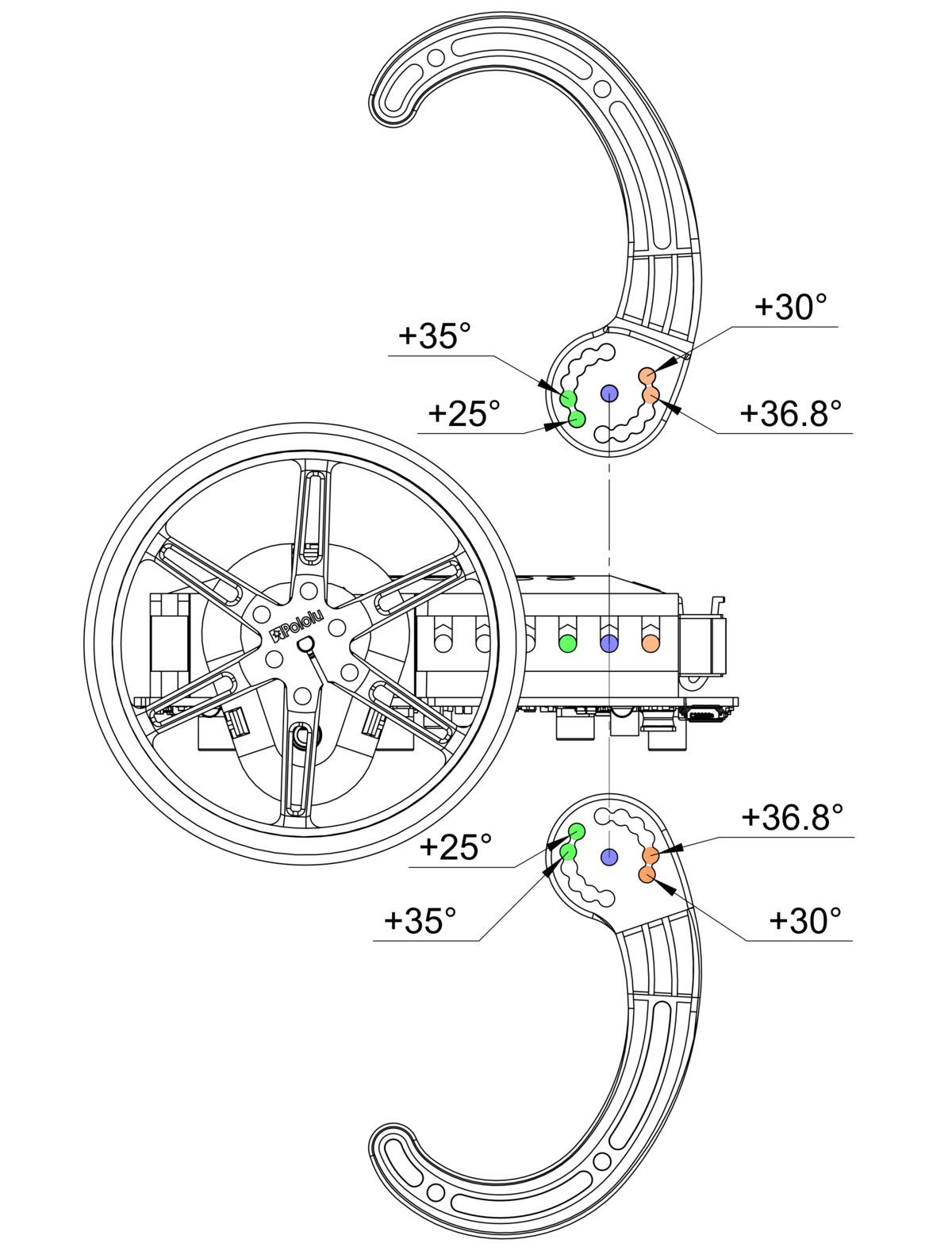
Balboa Bumper Cage angle diagram (when using 80mm wheels). |
|---|
 |
Variety of declined positions available when mounting the bumper cage on the Balboa 32U4 Balancing Robot with 80mm wheels. |
|---|
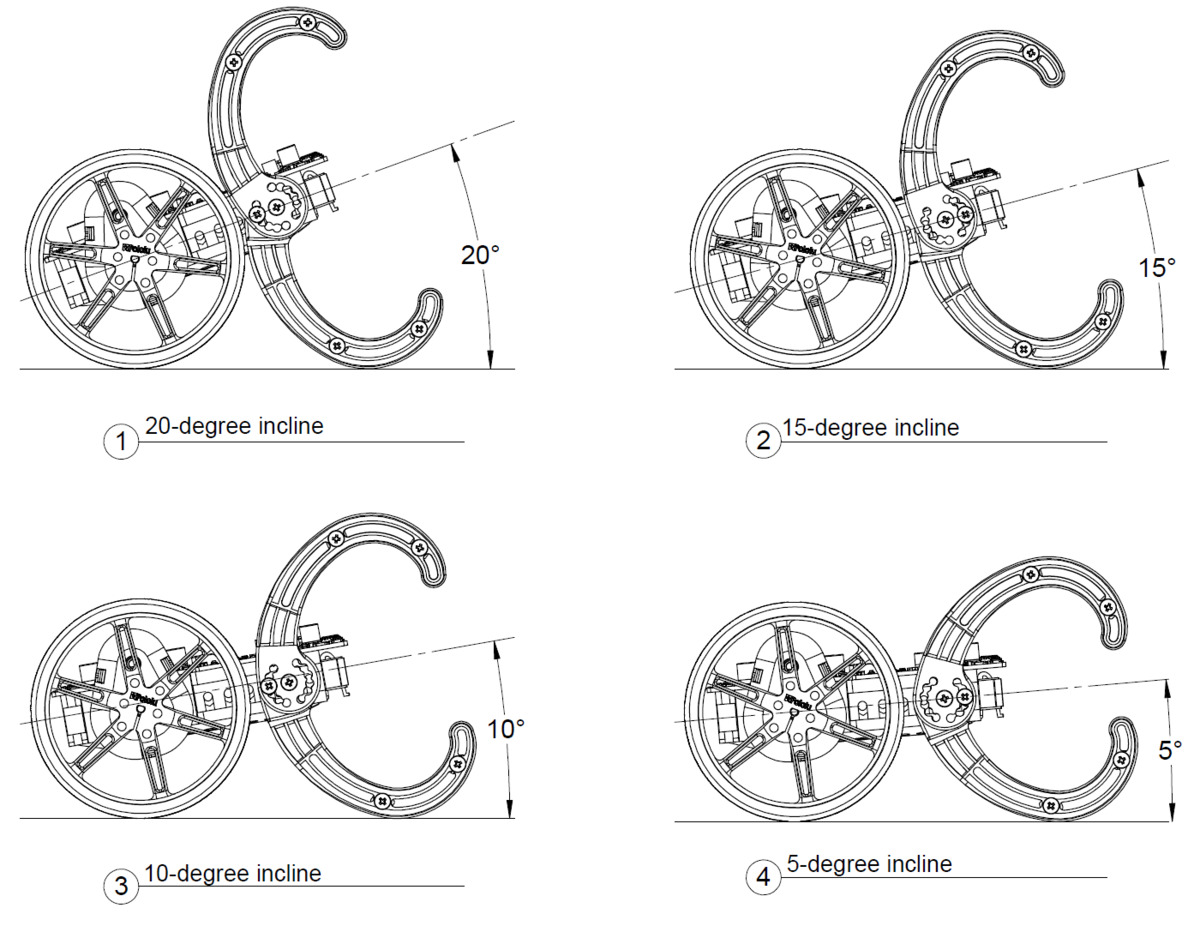 |
Variety of inclined positions available when mounting the bumper cage on the Balboa 32U4 Balancing Robot with 80mm wheels. |
|---|
 |
Balboa Bumper Cage angle diagram with flipped bumper skids (when using 80mm wheels). |
|---|
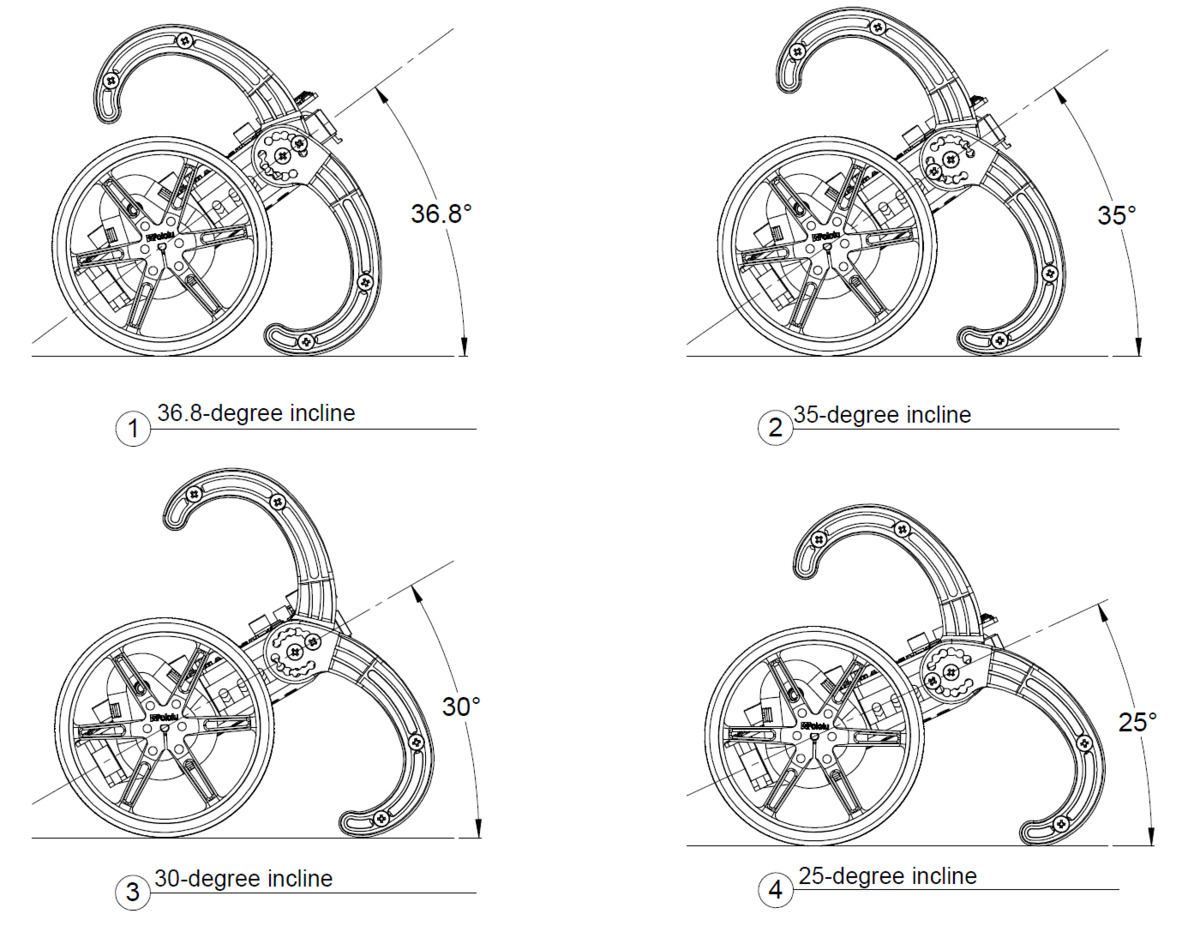 |
Variety of inclined positions available when mounting the bumper cage flipped on the Balboa 32U4 Balancing Robot with 80mm wheels. |
|---|
The Balboa 32U4 is a small, user-programmable balancing robot based on the Arduino-compatible ATmega32U4 AVR microcontroller from Microchip (formerly Atmel) and featuring two H-bridge motor drivers, quadrature encoders for closed-loop motor control, a full inertial measurement unit (3-axis accelerometer, gyro, and magnetometer) for estimating orientation and balancing, and an optional interface for connecting a Raspberry Pi to make a Raspberry Pi-controlled balancing robot. The control board includes a powerful 5 V switching step-down regulator that can supply up to 2 A continuously, along with a versatile power-switching and distribution circuit. Three on-board pushbuttons offer a convenient interface for user input, while indicator LEDs, a buzzer, and a connector for an optional LCD (not included) allow the robot to provide feedback.
This is a kit; assembly (including soldering) is required. Motors and wheels are not included so you can choose your own to personalize your robot; see below for details. Balboa runs on six AA batteries (not included), and a USB A to Micro-B cable (not included) is required for programming.
|
|
|
 |
Like our Zumo 32U4 robot and A-Star 32U4 programmable controllers, which are based on the same microcontroller, Balboa 32U4 features a USB interface and ships preloaded with an Arduino-compatible bootloader. A software add-on is available that makes it easy to program the robot from the Arduino environment, and we have Arduino libraries and example sketches to help get you started. A USB A to Micro-B cable (not included) is required for programming. For those who want to customize or enhance their robots with additional peripherals, the robot’s power rails and microcontroller’s I/O lines can be accessed via 0.1″-spaced through-holes along the sides, front/top, and back/bottom of the control board.
The Balboa 32U4 control board can serve as the robot’s main controller, or it can act a base for a more powerful Raspberry Pi controller. With the addition of a 2×20 female header and standoffs (neither of which are included), a compatible Raspberry Pi (Model B+ or newer, including Pi 3 Model B+ and Model A+) can plug directly into the board. Integrated level shifters make it easy to set up I²C communication and interface other signals between the two controllers, and the control board automatically supplies 5 V power to an attached Raspberry Pi. In this setup, the Raspberry Pi can handle the high-level robot control while relying on the Balboa’s ATmega32U4 microcontroller for low-level tasks, like running motors, reading encoders, and interfacing with other analog or timing-sensitive devices.
|
|
|
For those who want to operate the Balboa as a traditional differential-drive robot oriented on its side, a Stability Conversion Kit is available separately. This accessory snaps onto the front end of the Balboa chassis to make it longer and holds an included ball caster, providing a low-friction third contact point. This add-on is also useful in balancing applications, where the ball caster can be left off and the extension piece can be used to make the Balboa taller and give it more mounting points. For those who want to supply their own electronics, see the Balboa Chassis with Stability Conversion Kit.
|
|
|
The 5-Channel Reflectance Sensor Array for Balboa can mount directly to the Balboa 32U4 control board and provides an easy way to add line sensing to a balancing Balboa.
 |
5-Channel reflectance sensor array for Balboa in the edge-aligned mounting option. |
|---|
|
A look inside the external gearbox on the Balboa 32U4 Balancing Robot. |
|---|
The Balboa uses two micro metal gearmotors to drive external 2-gear gearboxes that further increase the gear ratio and support the weight of the robot with ball bearings rather than the motor shafts themselves. The Balboa kit gives you five reduction options to choose from when assembling your robot (ranging from 1.64:1 to 2.88:1), and you can further customize the gear ratio based on which micro metal gearmotor you choose for your robot, which is why we do not include motors with the kit. The integrated quadrature encoders require gearmotors with extended motor shafts, and we specifically recommend the 30:1 HPCB, 50:1 HPCB, or 75:1 HPCB versions.
 |
We also do not include wheels with the kit since there are a number of options to choose from. We recommend 80×10mm Pololu wheels, which are available in five colors — black, red, yellow, blue, and white — but our larger 90×10mm wheels and smaller 70×8mm wheels are also options if you know what you are doing (note that the 70×8mm wheels only offer a few millimeters of clearance when balancing).
|
|
|
With the exception of motors and wheels, this kit contains everything necessary to build a Balboa 32U4 balancing robot:
|
Balboa 32U4 Balancing Robot Kit components (wheels and motors are not included). |
|---|
All units sold after 19 May 2017 also include a bumper cage kit that can optionally be used to protect the robot from falls or as skids that the Balboa can rest on while driving around as an alternative to balancing:
|
Bumper Cage Kit for Balboa 32U4 Balancing Robot. |
|---|
|
|
|
See the Balboa 32U4 balancing robot user’s guide for detailed assembly instructions.
|
Dimensions of the Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
When you are using the Balboa as a balancing robot, it is important to protect the electronics from hard falls that could damage them. In general, we recommend running the Balboa on soft surfaces, such as carpet, and it helps to install the included bumper cage so that there is something to hit the ground before the electronics (see the pictures in the “Kit contents” section above). You can also make your own protective bumpers if you want, and the pictures below show two such home-made examples:
|
|
We have made the arms in the left picture available on Thingiverse so those with access to 3D printers can print their own.

User’s manual for the Pololu Balboa 32U4 balancing robot.
This download contains the Windows drivers for the A-Star 32U4 and the rest of our 32U4 family of boards.
This printable 1:1 scale chart helps you identify the gears included in the Balboa 32U4 Robot Kit and Balboa Chassis Kit and details the available gear ratios.
Note: all angles shown assume the use of 80mm wheels.
Note: this model includes micro metal gearmotors and 80mm wheels that are sold separately from the Balboa 32U4 Balancing Robot Kit. This model uses a simplified model of the Balboa 32U4 Control Board to reduce the file size.
Note: this model includes an LCD and headers that are sold separately from the Balboa 32U4 Balancing Robot Kit.
This DXF drawing shows the locations of all of the board’s holes.
Datasheet for the ST LSM6DS33 3D accelerometer and 3D gyroscope.
Datasheet for the ST LIS3MDL 3-axis magnetometer.
The Balboa32U4 library for the Arduino IDE helps interface with the on-board hardware on the Balboa 32U4 control board as well as the optional 5-channel reflectance sensor array for the Balboa.
An Arduino library for interfacing with the LSM6DSO and LSM6DS33 accelerometer and gyro ICs.
An Arduino library for interfacing with the LIS3MDL magnetometer.
Pololu forum user Jim Remington has shared a technique for compensating for hard iron distortion of the Balboa’s magnetometer. After corrections, he was able to create a compass program with a basic accuracy of ±2°, sufficient for navigating the Balboa around the room.
Arduino integrated development environment (IDE) software
This is a program for reading sensor data from Pololu IMU boards over I²C. It was written for and tested on the Raspberry Pi, but it will probably also work on similar embedded Linux boards that support I²C.
These 3D-printable support arms for the Balboa robot are a fun add-on that can help protect the robot’s electronics from damage if it falls over or runs into an obstacle.
This repository contains Arduino add-on files, Windows drivers, and bootloaders for the A-Star 328PB, A-Star 32U4, and the rest of our 32U4 family of boards.
Microchip’s product page for the ATmega32U4 AVR microcontroller, with links to its datasheet, application notes, and other resources.
No FAQs available.

Drew Wilkerson added a Robotis BT-410 Bluetooth-to-serial board to his Balboa Robot, which allows him to control that Balboa from a cell phone....

We now have a 5-Channel Reflectance Sensor Array designed specifically for use with the Balboa 32U4 Balancing Robot. The array mounts to...

Our new Balboa T-shirts are here! They feature our latest robot, the Balboa 32U4 balancing robot, within an enlarged outline of the 43-tooth gear...

This is the fifth and final post in a series about how to make a Balboa 32U4 robot balance. In earlier posts I covered everything you need to get...

This is the fourth post in a series about how to make a Balboa 32U4 robot balance. In earlier posts I covered the basic sensors and mechanical...

This is the third post in a series about how to make a Balboa 32U4 robot balance. Last week I talked about inertial sensors, especially the gyro....

We are now carrying the Aluminum Standoff for Raspberry Pi: 11mm Length, 4mm M2.5 Thread, M-F. The 11 mm body length is just right for mounting...

This is the second post in a series about how to make a Balboa 32U4 robot balance. Last week I talked about selecting mechanical components. In...

If you’re following Paul’s blog series about getting your Balboa robot balancing, you’ll probably want something to protect it when it falls. When...

This is the first post in a series about how to make a Balboa 32U4 robot balance. Today I will talk about selecting mechanical parts for your...

We added some new M3 screw lengths to our catalog: 6 mm, 10 mm, 12 mm, 14 mm, 16 mm, and 20 mm. (We already had 5 mm, 8 mm, 25 mm screws, and M3...
I am excited to announce the release of the Balboa robot! The Balboa is a two-wheeled balancing robot platform that is small enough to tempt you to...


