

This is a merged information page for Item #3499.
View normal product page.
Pololu item #:
3499
Brand:
Pololu
Status:
Active and Preferred

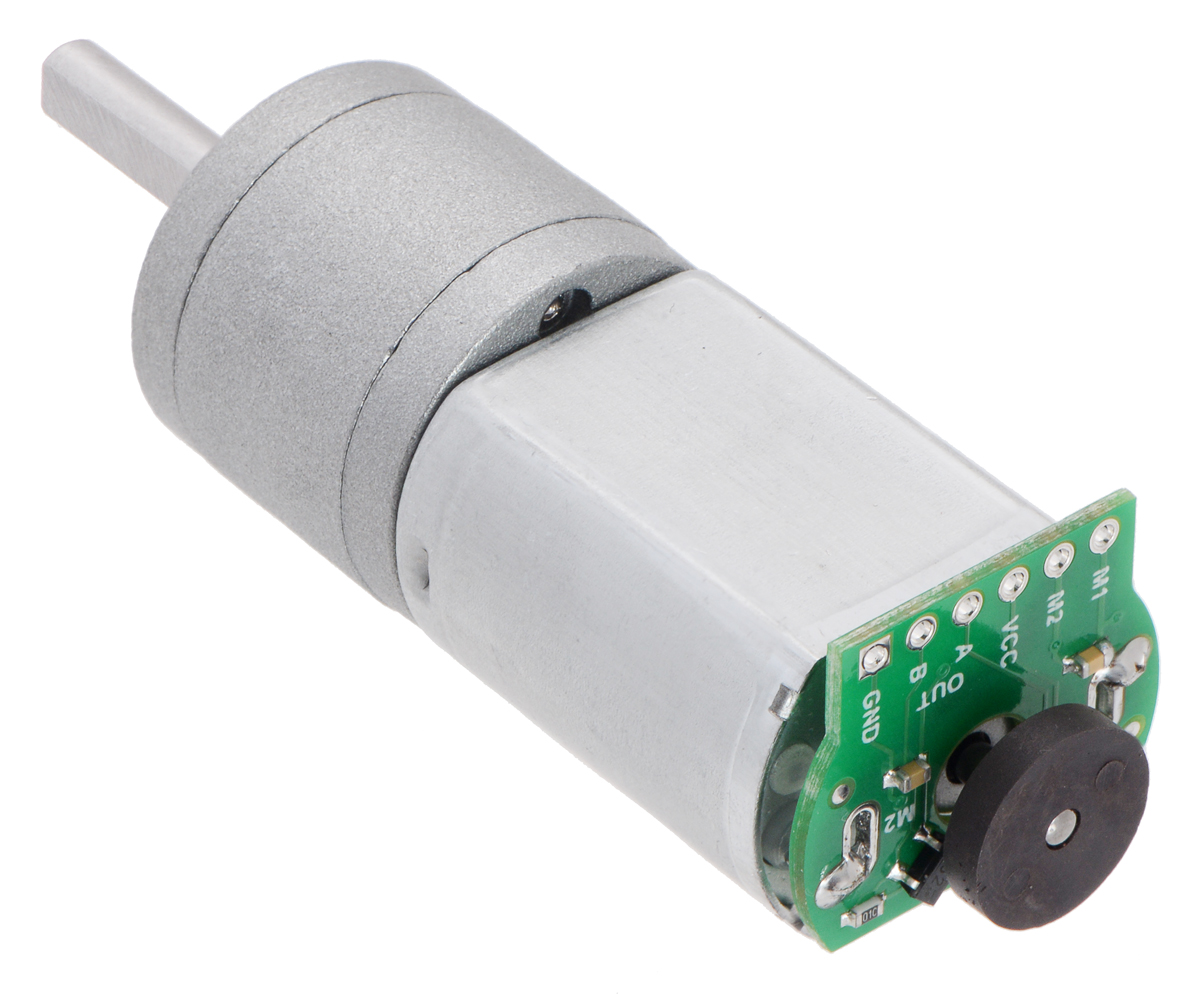
Add quadrature encoders to your 20D mm metal gearmotors (extended back shaft version required) with this kit that uses a magnetic disc and Hall effect sensors to provide 20 counts per revolution of the motor shaft. The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit. This module is compatible with all of the dual-shaft 20D mm metal gearmotors we carry.
This kit includes two encoder boards and two magnetic discs.
Alternatives available with variations in these parameter(s): connector Select variant…
 Compare all products in Encoders for 20D mm Metal Gearmotors.
Compare all products in Encoders for 20D mm Metal Gearmotors.
|
Magnetic Encoder Pair Kit for 20D mm Metal Gearmotors, 20 CPR, 2.7-18V. |
|---|
 |
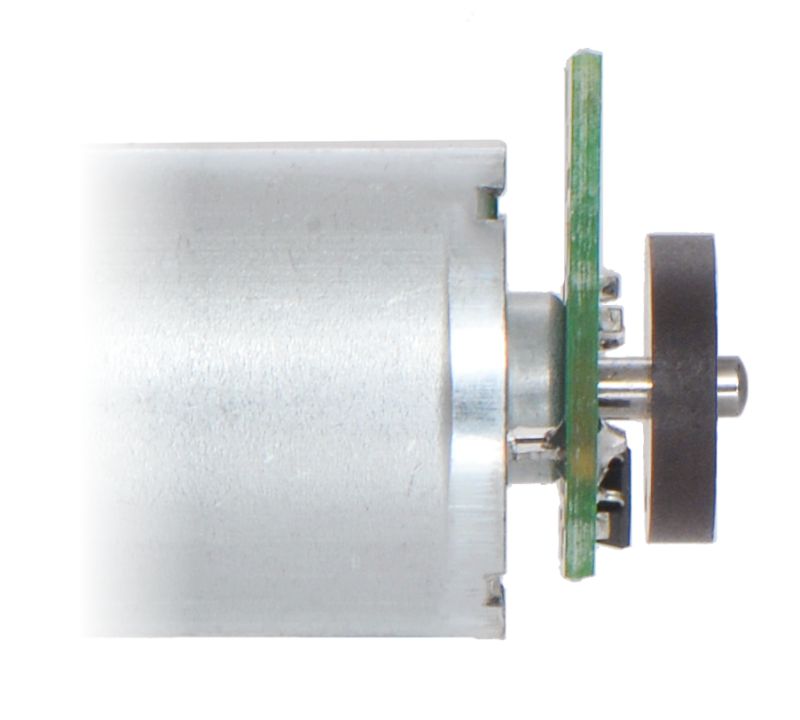
Magnetic Encoder Kit for 20D mm Metal Gearmotors assembled on a 20D mm metal gearmotor with extended motor shaft. |
|---|
 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors assembled on a 20D mm metal gearmotor with extended motor shaft. |
|---|
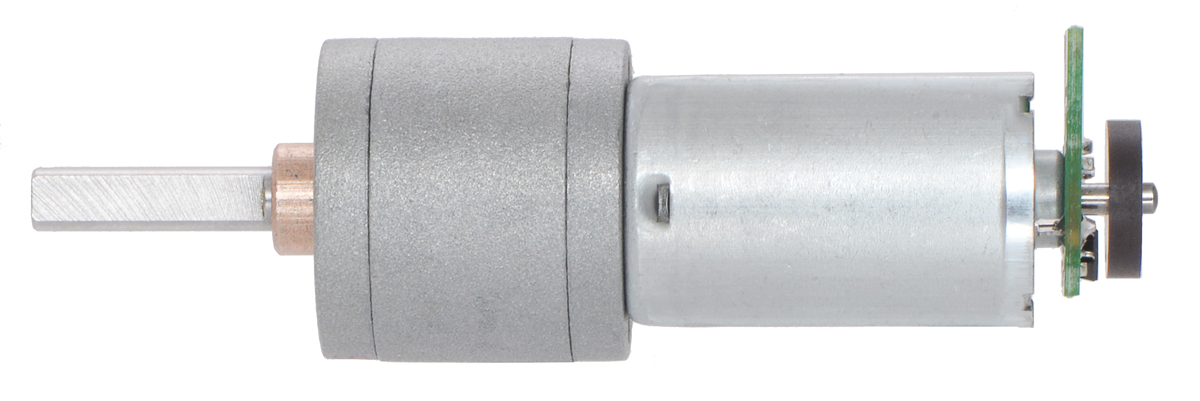 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors assembled on a 20D mm metal gearmotor with extended motor shaft. |
|---|
 |
Push the magnetic disc onto the motor shaft so the shaft protrudes approximately 1 mm past the disc. |
|---|
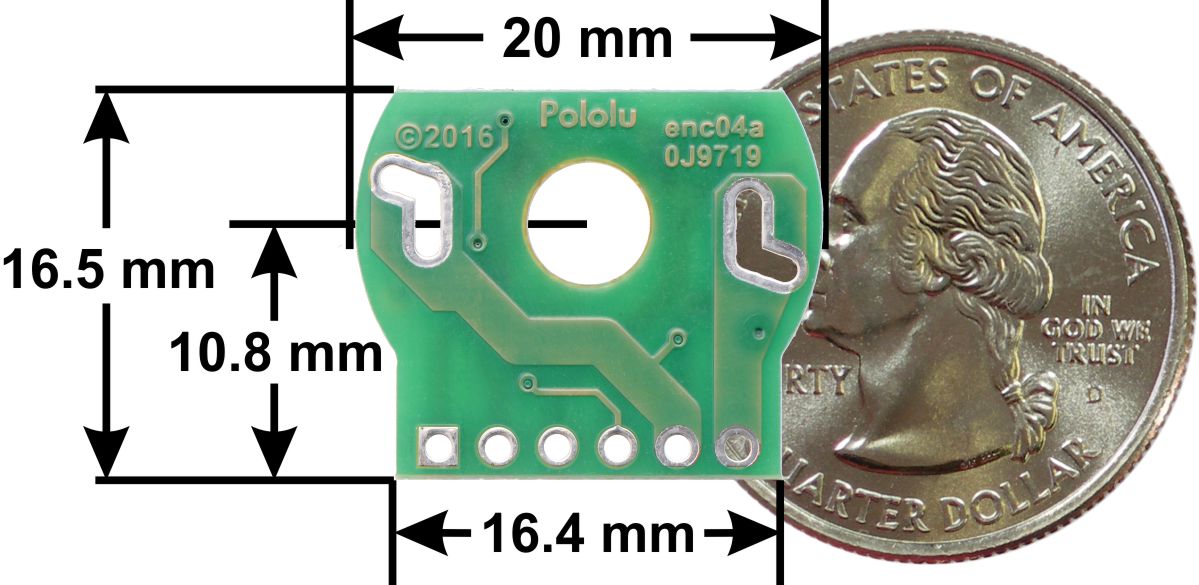 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors, motor-side view of PCB with dimensions. |
|---|
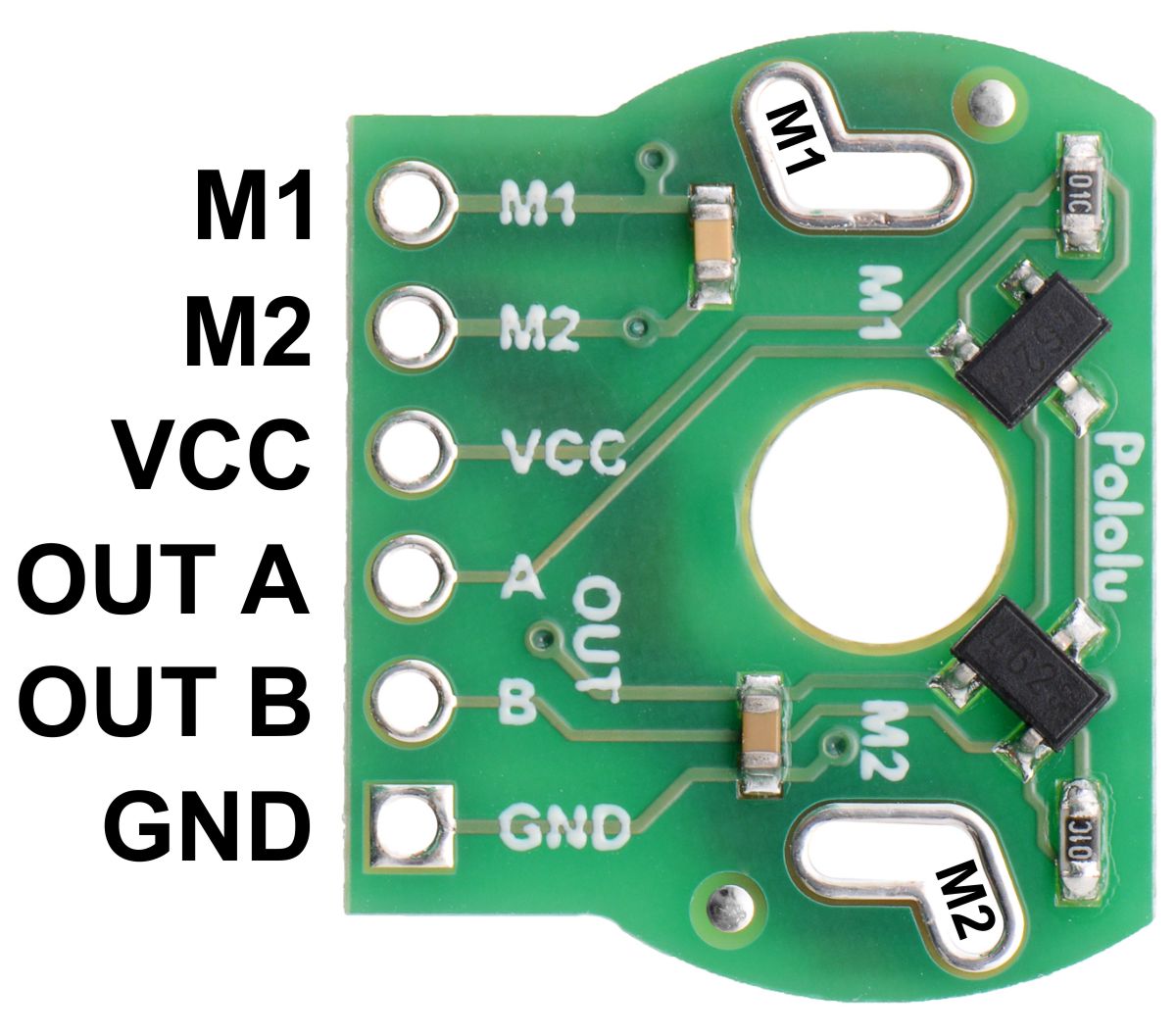 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors, magnet-side view of PCB with labeled pinout. |
|---|
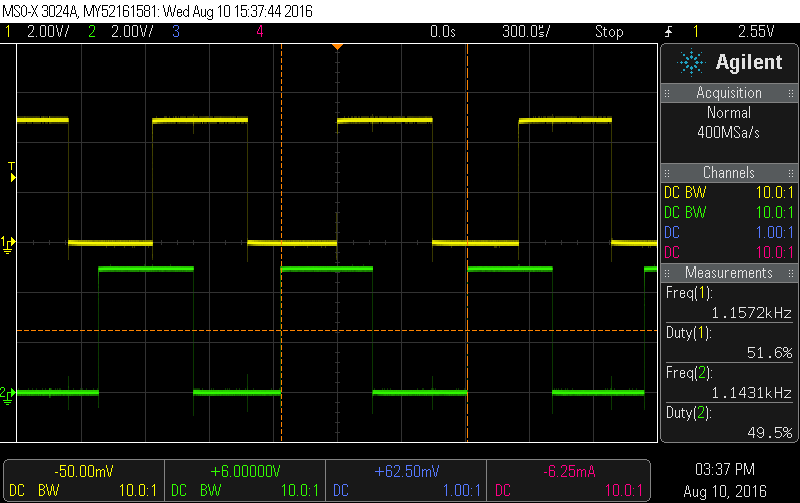 |
Encoder A and B outputs of a magnetic encoder on a 6V 20D mm metal gearmotor running at 6V. |
|---|
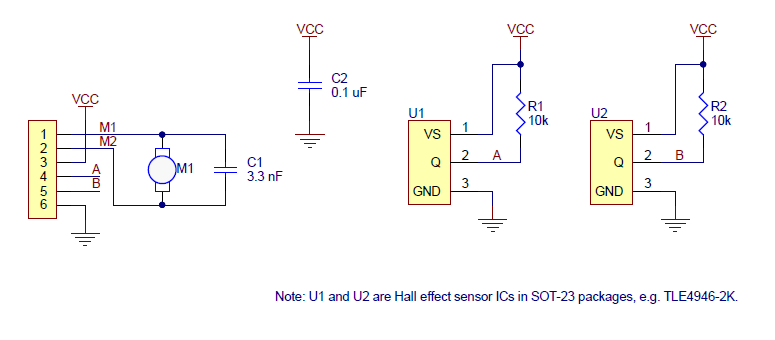 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors schematic diagram. |
|---|
 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors, magnet-side view of PCB. |
|---|
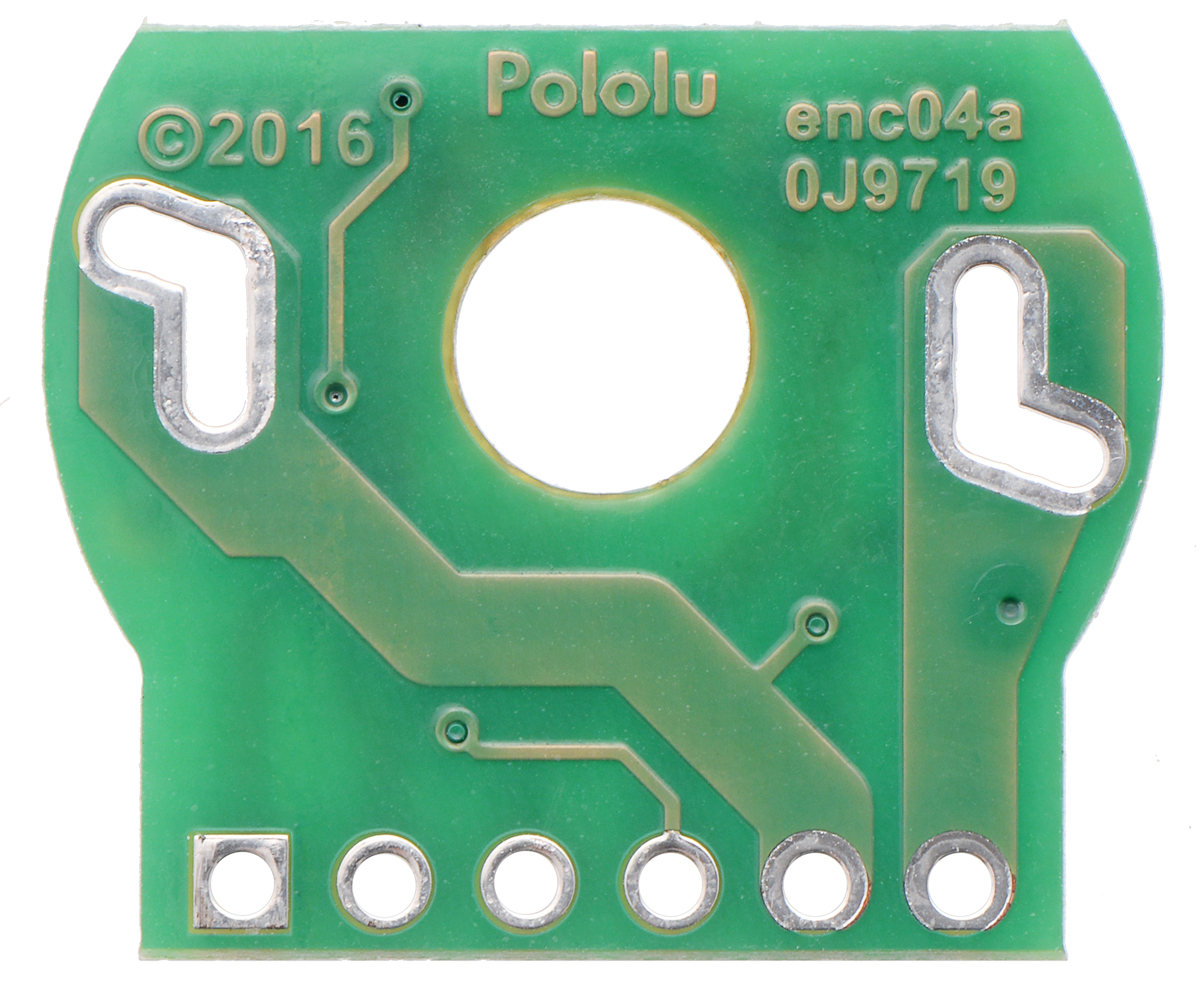 |
Magnetic Encoder Kit for 20D mm Metal Gearmotors, motor-side view of PCB. |
|---|
Newer versions available: We now have versions of this encoder with top-entry connectors or side-entry connectors that work with our assortment of 6-pin JST PH-type cables.
 |
Comparison of Magnetic Encoder for 20D mm Metal Gearmotors with Top-Entry Connector (left), Side-Entry Connector (center), and 0.1″-pitch through-holes (right). |
|---|
This kit includes two dual-channel Hall effect sensor boards and two 10-pole magnetic discs that can be used to add quadrature encoding to two 20D mm metal gearmotors with extended back shafts (motors are not included with this kit). The encoder board senses the rotation of the magnetic disc and provides a resolution of 20 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output shaft, multiply the gear ratio by 20. (We also have a 6-pole magnetic disc available separately that can work with this encoder to provide 12 counts per revolution of the motor shaft.)
|
This compact encoder solution fits within the 20 mm diameter cross section of the rear of the motors on three of the four sides. The fourth side of the encoder has the signal and power connections, and it extends 3 mm past flat edge of the motor. The assembly does not extend past the end of the extended motor shaft, which protrudes 6 mm beyond the back of the motor.
|
|
Note: This sensor system is intended for users comfortable with the physical encoder installation. It only works with 20D mm meta gearmotors that have extended motor shafts.
The encoder board is designed to be soldered directly to the back of the motor, with the back shaft of the motor protruding through the hole in the middle of the circuit board. One way to achieve good alignment between the board and the motor is to tack down the board to one motor pin and to solder the other pin only when the board is flat and well aligned. Be careful to avoid prolonged heating of the motor pins, which could deform the motor case or brushes. Once the board is soldered down to the two terminals, the motor leads are connected to the M1 and M2 pads along the edge of the board; the remaining four pads are used to power the sensors and access the two quadrature outputs:
|
|
The sensors are powered through the VCC and GND pins. VCC can be 2.7 V to 18 V, and the quadrature outputs A and B are digital signals that are either driven low (0 V) by the sensors or pulled to VCC through 10 kΩ pull-up resistors, depending on the applied magnetic field. The sensors’ comparators have built-in hysteresis, which prevents spurious signals in cases where the motor stops near a transition point.
|
Encoder A and B outputs of a magnetic encoder on a 6V 20D mm metal gearmotor running at 6V. |
|---|
The board’s six pads have a 0.1″ (2.54 mm) pitch, so they are compatible with common 0.1″ connectors, or you can just solder individual wires directly to the board.
Once the board is soldered to the motor, the magnetic encoder disc can be pushed onto the motor shaft. One easy way to accomplish this is to press the motor onto the disc while it is sitting on a flat surface, pushing until the shaft makes contact with that surface. From here, we recommend further pushing the disc a little closer to the PCB (by approximately 1 mm) to help ensure a strong signal and good performance. The exact position doesn’t matter; just make sure not to push it so close that the magnet is rubbing against the sensors.
|
Push the magnetic disc onto the motor shaft so the shaft protrudes approximately 1 mm past the disc. |
|---|
|
This schematic is also available as a downloadable pdf (54k pdf).
| Size: | 20 mm × 16.5 mm |
|---|---|
| Weight: | 2.4 g1 |
| Minimum operating voltage: | 2.7 V |
|---|---|
| Maximum operating voltage: | 18 V |
| Connector: | none (0.1″-pitch through-holes) |
| Encoder resolution: | 20 CPR2 |
| PCB dev codes: | enc04a |
|---|---|
| Other PCB markings: | 0J9719 |
This DXF drawing shows the locations of all of the board’s holes.
This file contains 3D models (in the step file format) of the components for the Magnetic Encoder Pair Kit for 20D mm Metal Gearmotors, 20 CPR, 2.7-18V.
No FAQs available.

We are excited to introduce encoders with JST PH-type connectors for our 20D mm metal gearmotors, available in two versions to better satisfy...

This is not an April fools joke! One of our products is literally on the moon right now, and we got clearance from Firefly Aerospace to share this...

20D mm metal gearmotor CB with long-life carbon brushes. 20D mm metal gearmotor CB with long-life carbon brushes and an extended motor...

Our vast assortment of metal gearmotors has gotten even bigger! With over 100 micro metal gearmotor options and nearly 100 25D mm metal gearmotor...