Support »
Sample Project: Simple Hexapod Walker
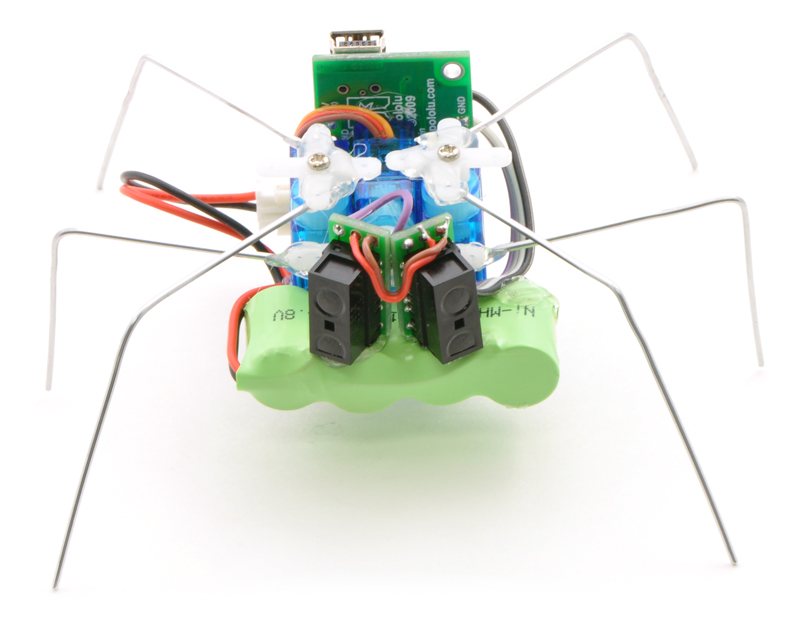 |
The assembled hexapod, front view. |
|---|
View entire document on a single page.
You can also view this document as a printable PDF.
- 1. Introduction
- 2. Materials and Tools
- 3. Construction
- 4. Sequencing the Hexapod Gait
- 5. Using a Script for Obstacle Avoidance
- 6. Suggested Modifications and Improvements
- 7. Conclusion and Community






Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
