Pololu Blog » User Profile: Emily » Posts by Emily »
Posts by Emily (Page 3)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Our Year End Sale is going on now!

We have one last sale for you before 2020 comes to an end! Get discounts on products we released in 2020, on all active Pololu-brand items, and on some select products that we’d like to reduce our inventory of. The sale runs through the end of Friday, January 1. Visit the sale page for details. Happy New Year!
Our Christmas Sale is going on now!

If you missed our Black Friday sale or realize you didn’t quite get everything you wanted, don’t fret: now through December 24, we have all active Pololu-brand and PCX products on sale for 12% off, and we are offering 15% off twenty broad categories of our products. Save on some Christmas shopping, or stock up now on robot parts for the new year. Merry Christmas!
New products: JST SH-Style cables and connectors for Micro Metal Gearmotor encoders
|
|
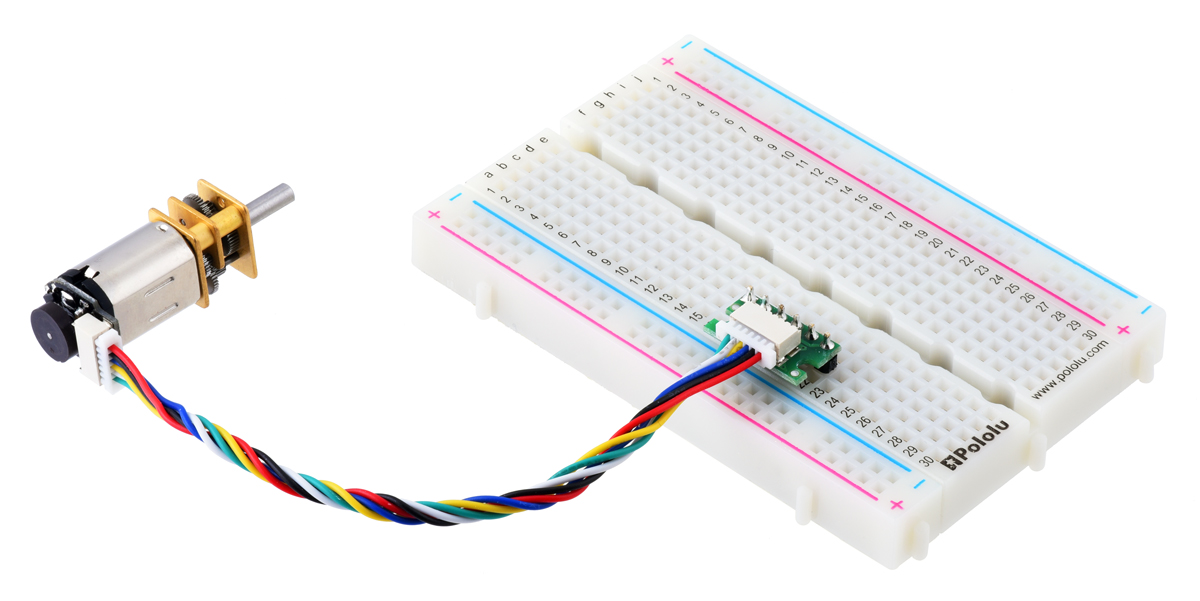
We have expanded our selection of JST SH-style cables and connectors! These cables and connectors are ideal for use with our magnetic encoders for Micro Metal Gearmotors as seen in the photo on the right above.
In addition to the 6-pin single-ended female JST SH-style cables we’ve offered for a while, we now offer 6-pin female-female JST SH-style cables in five different lengths. Here’s the full list of currently available options:
- 6-Pin Female-Female JST SH-Style Cable 10 cm
- 6-Pin Female-Female JST SH-Style Cable 16 cm
- 6-Pin Female-Female JST SH-Style Cable 25 cm
- 6-Pin Female-Female JST SH-Style Cable 40 cm
- 6-Pin Female-Female JST SH-Style Cable 63 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 12 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 30 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 75 cm
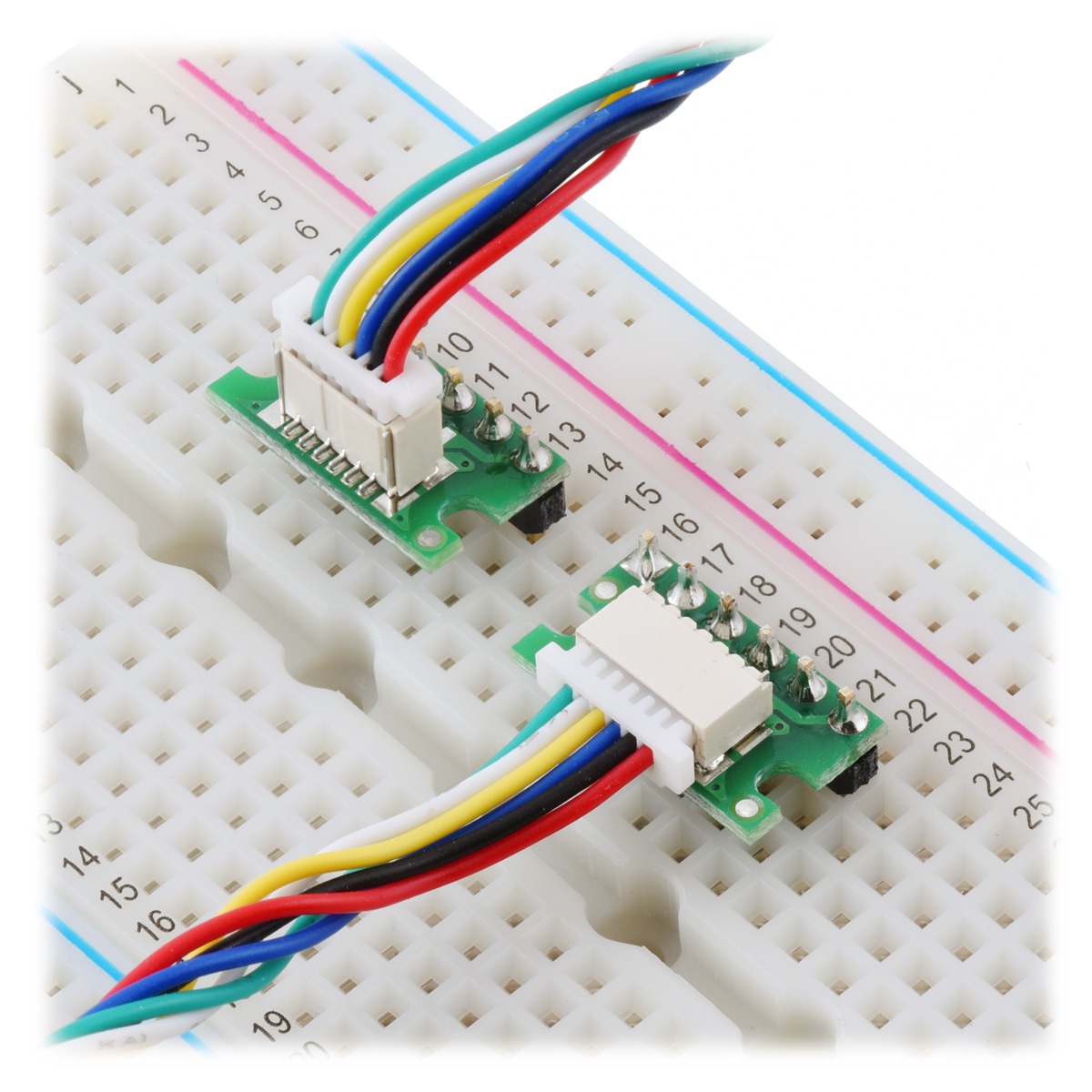
To go along with the new female-female cables, we also have breakout boards available for both the side-entry and top-entry versions of the JST SH-style connector. When used with our encoders and JST cables, these breakout boards offer a convenient way to access the encoder signal and power pins through a breadboard, and the pins are labeled on the board’s bottom silkscreen with this application in mind. Alternatively, these boards can serve as general-purpose breakouts for other applications that do not involve encoders. For example, a pair of connector breakouts with a female-female cable could be used as a removable general-purpose interconnect between different parts of a modular system.
|
|
We are trying something new with how we package and sell these connector boards. At Pololu, all our electronics undergo functional testing, where each product is placed on a custom testing apparatus and checked for functionality. This is a labor intensive step in our production process, and for a product as simple as these connector boards, testing and packaging represent a significant amount of the cost to produce it. As such, we are offering two options for purchasing these connector boards: either fully tested and individually packaged, or an untested pack of three.
|
|

Even though we do not functionally test the discounted 3-packs, each one undergoes automated optical inspection (AOI) to visually check the placement of the connector and the quality of the solder joints. Additionally, each printed circuit board (PCB) is electrically tested by our PCB manufacturer, so we know the PCB itself is free from electrical defects. This makes it very unlikely for any of the breakout boards to be bad.
The additional functional testing we perform on the fully tested units just confirms the solder connections between the connector and the board. If you purchase the untested units but would still like this additional confirmation, you can easily check it yourself with a multimeter. (Just use it to check for continuity between corresponding pins on the actual JST connector and through-holes on the board, and verify that there is no continuity between adjacent pins.) In the unlikely event you receive a unit with a poor or shorted connection, you should be able to touch it up yourself with a soldering iron. So for common applications that require two boards, such as use with a pair of encoders, you have the option of two individually packaged units we have confirmed functional or, for the same price, three units that have passed visual inspection and are very likely to leave you with two functional units plus a spare.
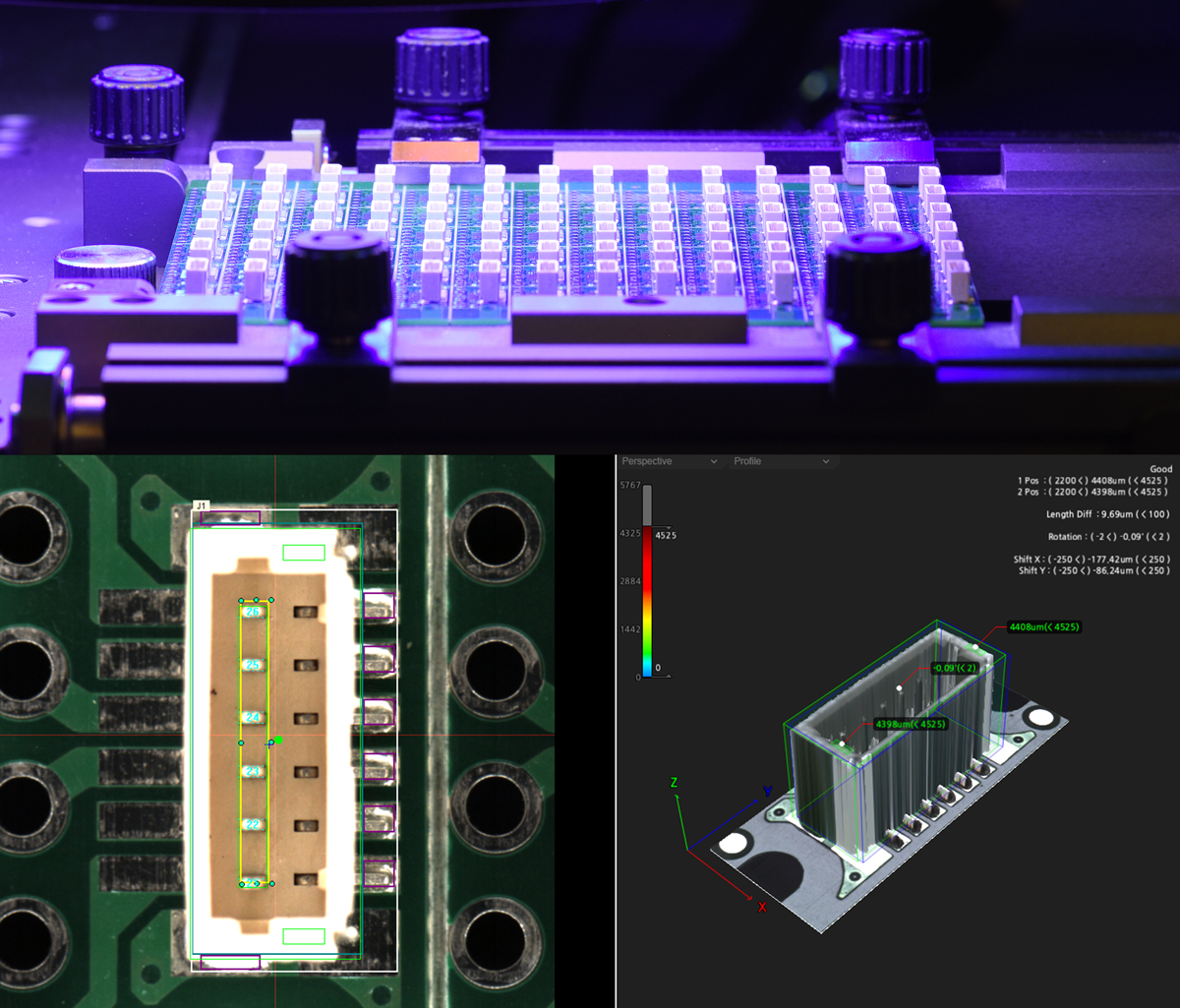 |
All units automatically optically inspected. |
|---|
Here are all of our 6-pin JST SH-style connector options:
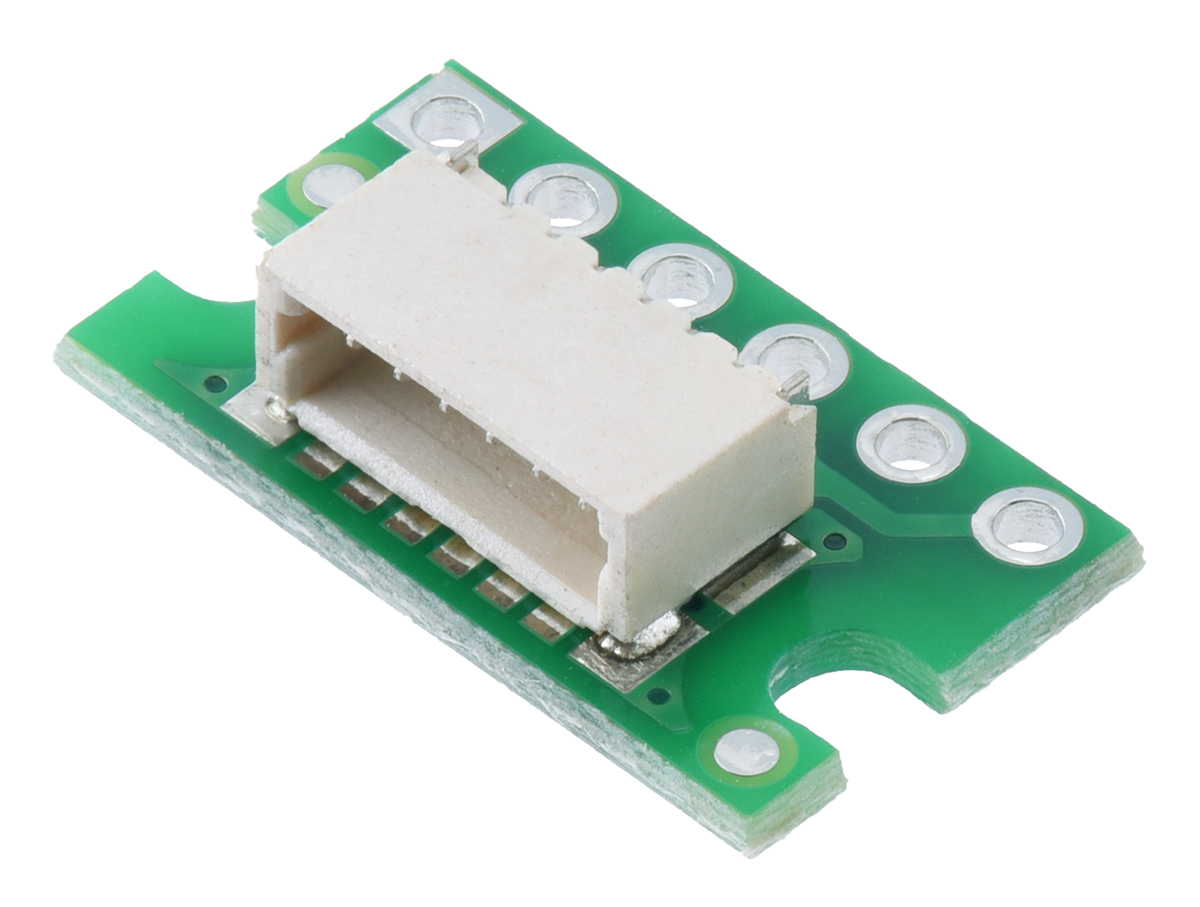
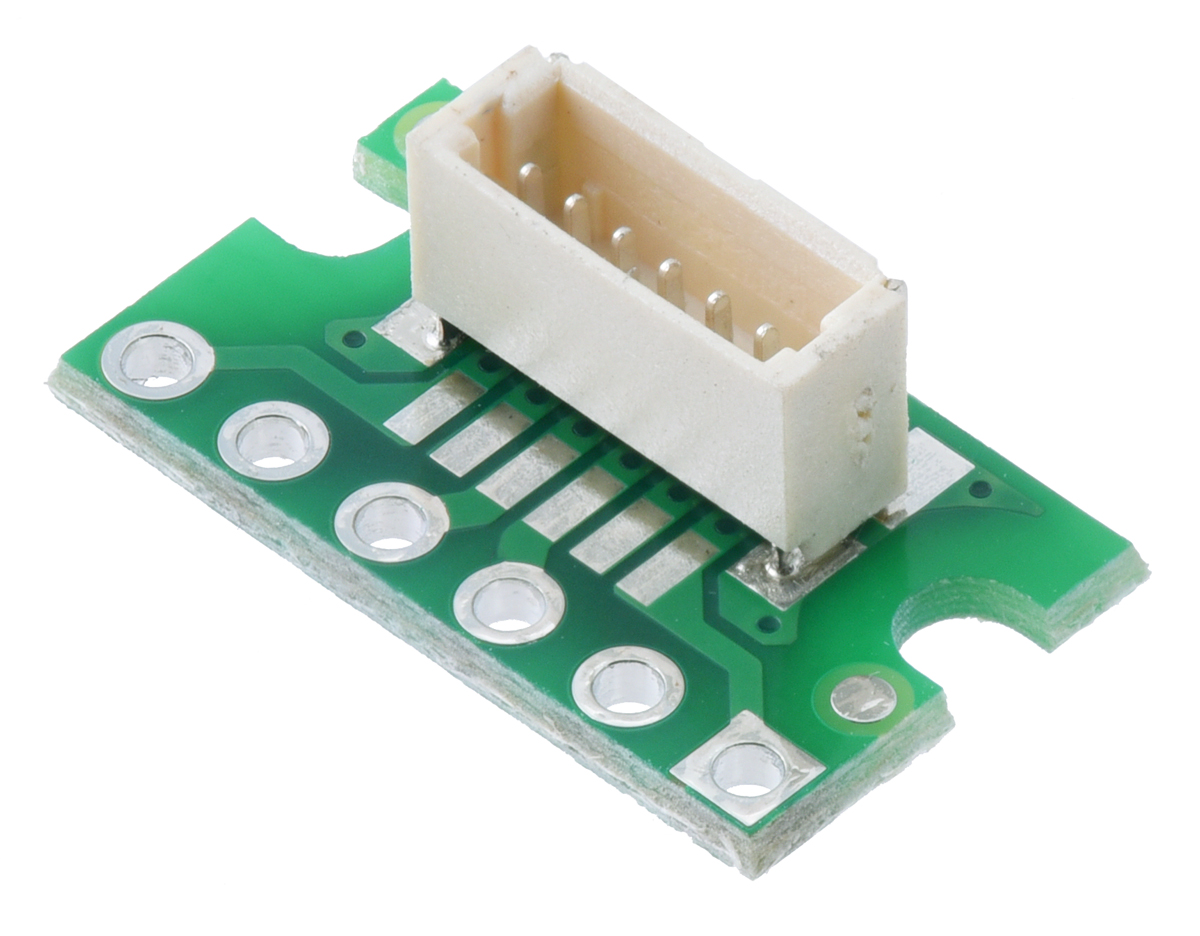
- Breakout for JST SH-Style Connector, 6-Pin Male Top-Entry (Individually Packaged)
- Breakout for JST SH-Style Connector, 6-Pin Male Top-Entry (3-Pack Untested)
- Breakout for JST SH-Style Connector, 6-Pin Male Side-Entry (Individually Packaged)
- Breakout for JST SH-Style Connector, 6-Pin Male Side-Entry (3-Pack Untested)
All of these cables and connectors and the encoders they are compatible with can be found here. And you can get 15% off the encoders and cables using coupons from our Christmas Sale going on now!
What do you think about this kind of approach where we test something less thoroughly in order to offer it at a lower price? Would you prefer it over the fully tested option? Do you think one option will be more popular than the other? We’d love to hear your thoughts!
Related products














Our Black Friday/Cyber Monday Sale is going on now!

Our Black Friday / Cyber Monday sale is going strong, and we have been working hard to make and ship the products that people are getting great deals on. Most of the sale coupons can be used on backorders if we happen to run out of stock, but you should still get your orders in early since lead times on some popular products can get long.
Please note that our same-day shipping guarantee has been suspended since we started operating with a reduced staff in March due to the COVID-19 pandemic (see Jan’s latest post here), though we will do our best to get your order shipped as fast as we can. Additionally, we are closed Thursday, November 26 (tomorrow) for Thanksgiving. Happy Thanksgiving!
PULSE: A pendant to warn you when you touch your face
 |
PULSE pendant by JPL. |
|---|
PULSE is a 3D-printed wearable device designed by JPL that vibrates when a person’s hand is nearing their face. It’s based around our 38 kHz IR Proximity Sensor, and was designed to be relatively easy to reproduce (it doesn’t require a microcontroller or programming, but you do need access to a 3D printer to make the case). The project is open-source hardware, with complete instructions, design files, and a full parts list available on GitHub.
These are the parts that can be purchased from Pololu:
- Pololu 38 kHz IR Proximity Sensor, Fixed Gain, High Brightness
- 10×2.0mm or 10×3.4mm shaftless vibration motor
- Mini Slide Switch: 3-Pin, SPDT, 0.3A
- Wire
Here’s a short demo of our intern Curtis using a PULSE pendant he made himself:
You can find more information about the PULSE pendant on the PULSE website.
Related products




Empty Vessels: a performance of robots, cellos, and artificial intelligence
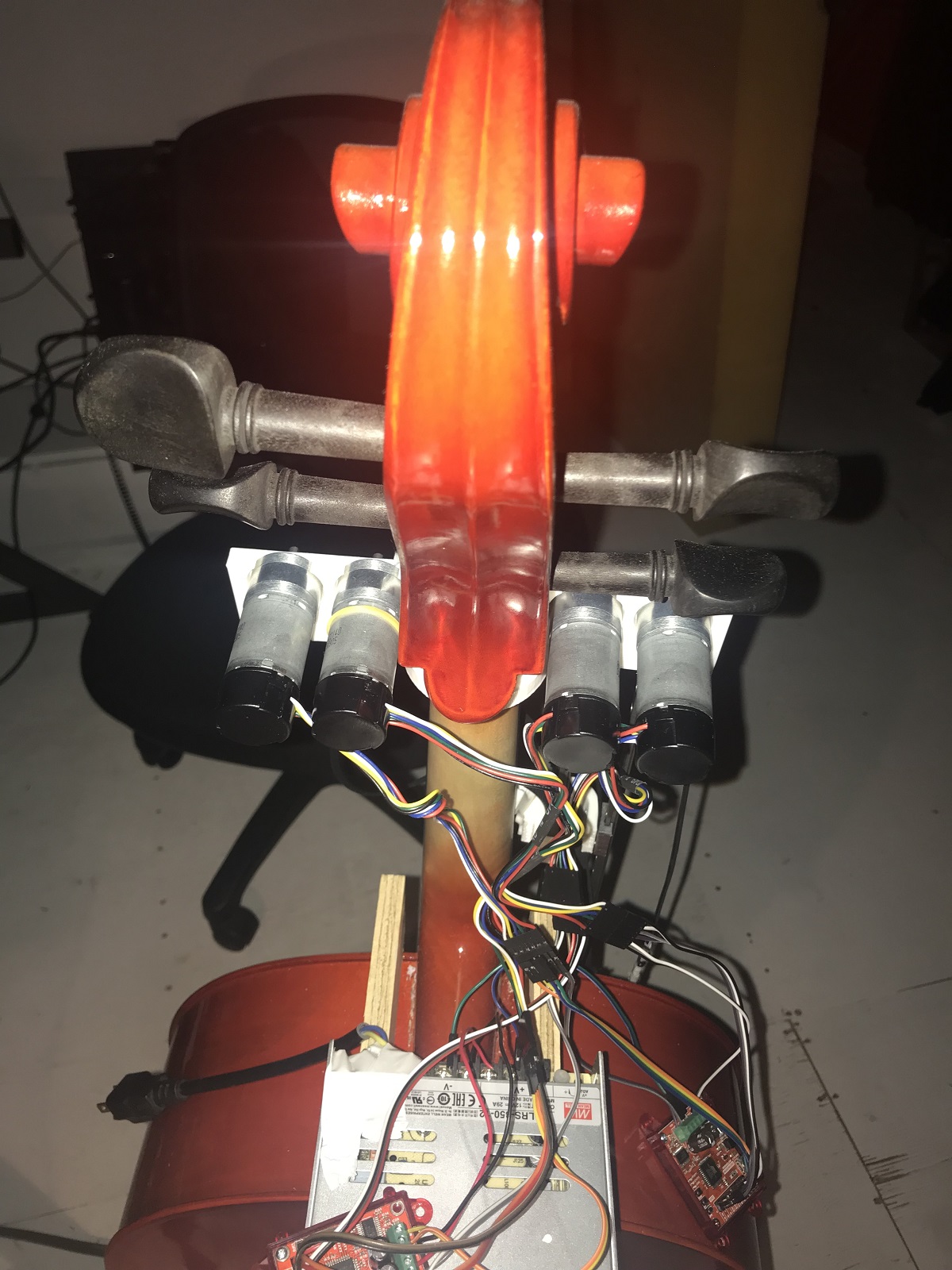
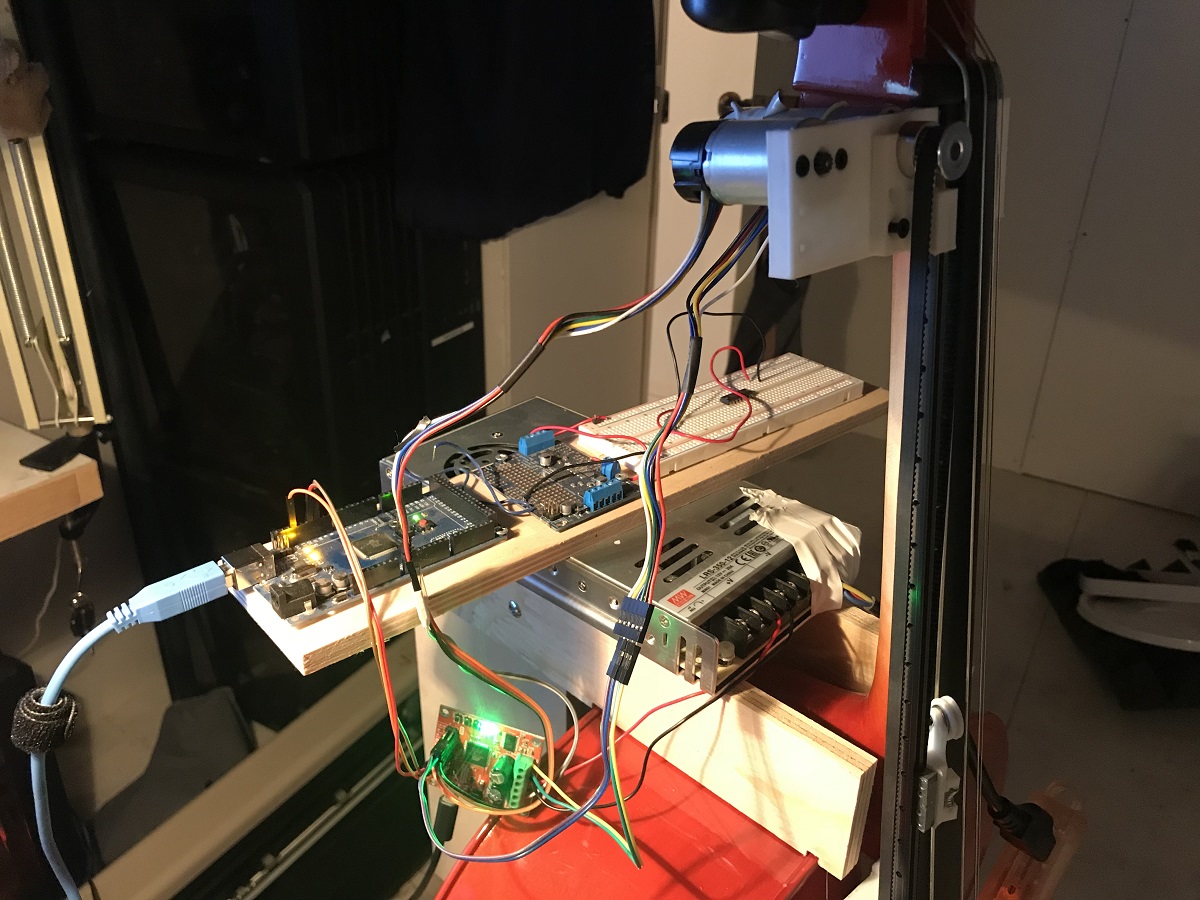
Artist David Gardener contacted us recently to share his work, Empty Vessels (seen in the above video), an immersive audio visual installation that explores the connection between machines, data, and their environment. The piece features three cellos played by custom built robotic structures that perform music composed in real time. It premiered in November 2019 at the Society for Arts and Technology in Montreal, where it performed for sold out audiences for two weeks! David was kind enough to answer our questions about the piece and allow us to share his answers along with some more footage and pictures with you below:
 |
How long did you work on the piece?
The project started as an idea by myself (David Gardener) and Greg Debicki about a year ago. It remained an idea for most of the year until we were approached by the Society for Arts and Technology in Montreal (SAT) for help funding the project, where we could work on the project as artists in residence. At the end of the residency (in November) we would also premiere the show. This gave the project a very fast timeline taking just two and a half months from concept to presentation for two weeks of shows. I think it is probably the quickest timeline I have ever worked to, having to design, engineer & build the whole project.
Can you tell us which products of ours you used and how they were used in your project?
For the project I used the following components from Pololu:
- 12 x 9.7:1 Metal Gearmotor 25Dx63L mm HP 12V with 48 CPR Encoder (one for each string on each cello)
- 6 x RoboClaw 2x7A Motor Controller (two per cello to drive those motors)
These were used to drive linear slides that moved the note sliders up and down the fingerboard. The reason for using this method was because I am a cellist myself, and the ability to slide between notes is really important in the sound of the cello. Unlike a guitar, there are no frets on a cello’s fingerboard, so the note sliders have to move to very accurate positions on the fingerboard to make sure that the notes are nicely in tune. On startup the motors would all drive the sliders to a home position using a limit switch. From there they would move to the different notes just by driving the motors to pre-defined positions. I decided to use a slider per string on each cello to maximise the amount of notes that could be played simultaneously, meaning they could play 12 note chords, or fast melody lines by splitting the melody across the 3 cellos.
|
|
|

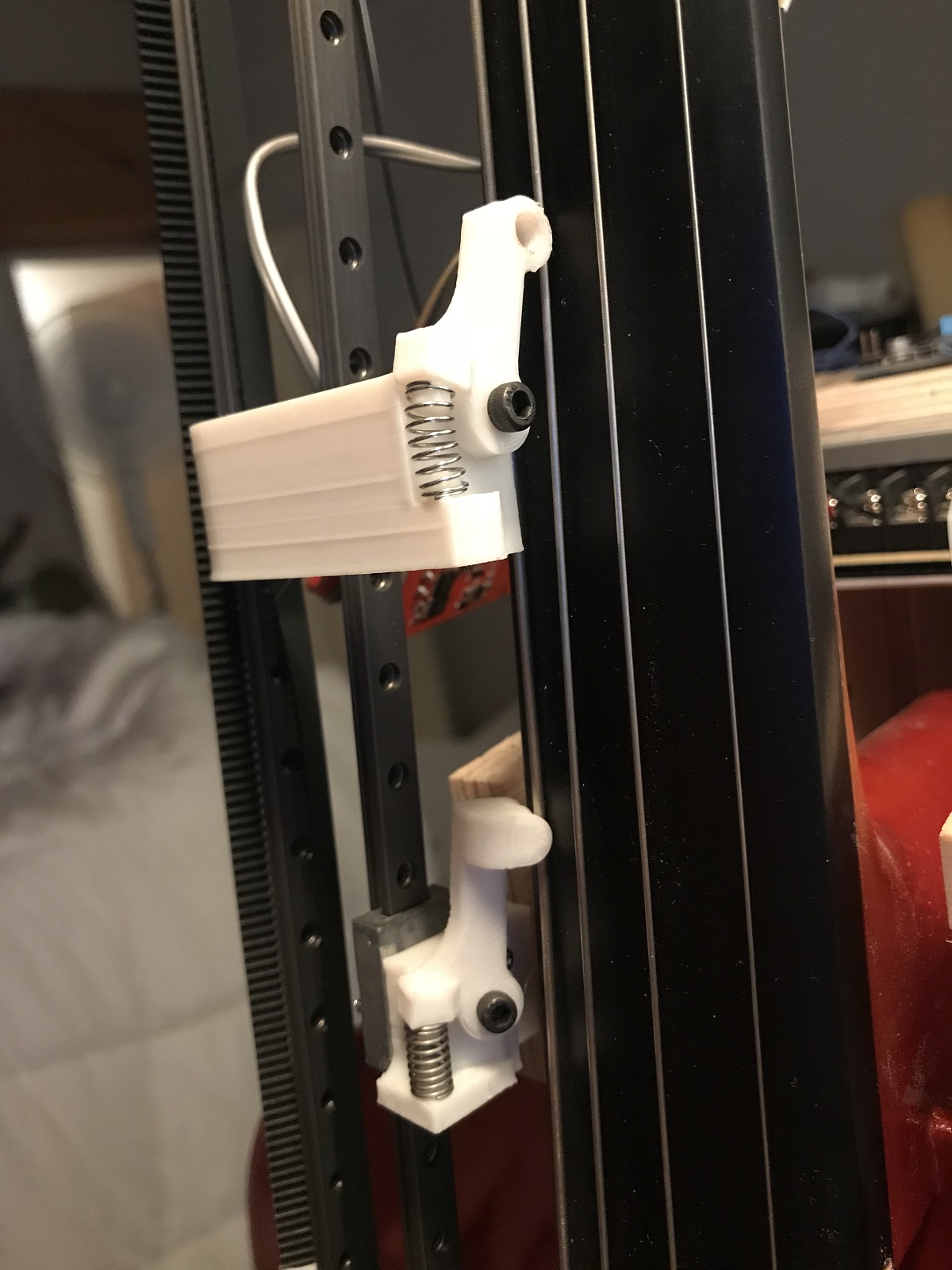
Did you design the slider systems for the fingerboards? It looks like some of the parts might be 3D printed; are the design files available anywhere?
Yes, I designed the whole robotic system from scratch. The cello is such a beautiful instrument in both design and sound. However it is designed specifically for a human body, none of the strings are parallel or in the same plane even, they all diverge towards the bridge. I didn’t want to change the actual instrument in any way for this project. This complicated the build a lot! On top of that, no two instruments are the same, so I had to make sure that the parts could be adjusted in the different planes depending on the instrument they were attached to. Another difficulty is at the top end of the finger board the strings are very close together meaning the sliders all had to be very thin so as not to collide with each other. In the end all these considerations led me to the decision that I would 3D print all the parts. With such a short build timeline, this meant I could design and print revisions of all the parts much quicker than if I was making all the parts by hand in the workshop.
The designs for the parts are not available at the moment as they are very much working prototypes! I plan to upload them for anyone that wants to see them at a stage in the future that I am happy with them.
 |
Can you tell us what your motor control setup is? (What motor drivers are you using, how are you processing the encoders, how are you coordinating all the movement, etc.?)
So I think I answered this in question 2. But a more general overview of the working of the cellos is – The main brain of the three cellos is the software MAX MSP (running on a PC). This would send position data over serial to an Arduino which then told the RoboClaws the next position to send the motors to. The RoboClaws were running in closed loop mode so they were dealing with the encoders directly.
We noticed you have some fans pointed at the upper bank of motors on each cello. Are the motors or controllers overheating, or is that to protect the cellos from getting too warm?
That is funny. Yes, originally I was using your 4.4:1 gear ratio 12 V motors as I really wanted the note sliders to be whizzing up and down the fingerboards like a cello maestro. But after burning out some of the motors by driving them too hard, I decided to switch to the next gear ratio down (and actually even they were getting hot). But by this point I had already locked off the design and ordered all the motors as the opening night for the piece was in three weeks. So to make sure I didn’t lose any more motors, I added some forced air cooling (just a silent fan sat on a bar stool pointed at the motors of each cello)… it added a slight bit of rock ‘n’ roll to the show.
Can you give us some details about how the music is generated?
So the project is headed towards having a fully artificially intelligent score where the music is generated on the spot and then played. The project is designed to also play in a museum environment where it will sit and play for its audience forever evolving music, with the intensity of the compositions controlled by the number of people it is playing to. However, it is currently in a more generative state where it will play music based on a set of musical rules from which it generates the music. This is where my collaborator Greg came into the project, developing patches in MAX MSP that generate the compositions and then work out which string on which cello to send each note to.
Is the piece on exhibit anywhere currently, or are there any planned exhibits coming up?
The piece was shown for a week at the SAT at the end of last year, but it was almost totally sold out so an extra week was added straight after that. The cellos are now back in my studio, where they will be upgraded. They are scheduled for another two weeks of shows at the SAT from March 24th 2020. There are some other shows in Montreal where it will be shown as part of some electronic music and tech festivals (unannounced as of right now). It is then planned for a European tour late summer 2020. It is best to keep track of the dates from my Instagram, @montreal_life_support.
Do you have a website or any social media channels where people can follow your work?
Instagram is probably the best. These are the handles:
- David Gardener: @montreal_life_support
- Greg Debicki: @woulg
Other than that I will be releasing a making-of style video documenting the build in the coming weeks on the YouTube channel.
 |
Cat tax! |
|---|
Thanks so much to David for sharing your work with us and answering all our questions. For readers in the Montreal area near the end of March/beginning of April, visit the Society for Arts and Technology’s website for showtime and ticket information.
Related products


New products: Pololu Wheels for Micro and Standard Servos

We are thrilled to announce the release of our wheels for micro and standard sized servos. These wheels are similar to our wheels for 3mm D shafts and consist of a durable ABS hub with a silicone tire. They are currently available in 40, 60, 70, and 90 mm diameter options. All but the 40 mm size feature mounting holes that are compatible with various versions of our universal mounting hubs and slots in the spokes that allow additional accessories to be mounted to the wheel such as decorations or parts of an encoder system.
 |
Black Pololu Wheels for Standard and Micro Servos – 90, 70, 60, and 40 mm diameters. |
|---|
 |
The 40 mm and 60 mm sizes are compatible with micro servo splines with 20 teeth and a 4.8 mm diameter and can be used with the following continuous rotation servos that we carry:
- FEETECH FS90R Micro Continuous Rotation Servo
- FEETECH FT90R Digital Micro Continuous Rotation Servo.
 |
The 70 mm and 90 mm sizes are compatible with standard servo splines with 25 teeth and a 5.8 mm diameter and can be used with the following continuous rotation servos that we carry:
- FEETECH Continuous Rotation Servo FS5106R
- Power HD Continuous Rotation Servo AR-3606HB
- SpringRC SM-S4303R Continuous Rotation Servo
- Parallax Feedback 360° High-Speed Servo
If you plan on using the wheels with a servo not listed above, be sure to check your servo’s specifications for compatibility as servo splines are not standardized for particular sized servos.
These wheels, like many of our plastic parts, are designed by us at our Las Vegas facility and then injection molded in China. Usually, we ship bulkier parts made overseas by boat, which can take several months to get here. We were so excited about these, though, that we couldn’t wait that long! So, we had a small amount shipped by air to make them available as soon as possible. This means the initial stock of these is limited, and while we’ll have more coming by boat, the upcoming Chinese New Year will delay that even more than usual. So if you don’t want to miss out on these initial units, order yours soon!
Introductory special
As usual, we are offering an extra introductory special discount on these wheels, to help share in our celebration of releasing new products. The first hundred customers to use coupon code SERVOWHEELS can get 22% off up to 3 pairs of each size!
Related products










New products: 24V 37D Metal Gearmotors
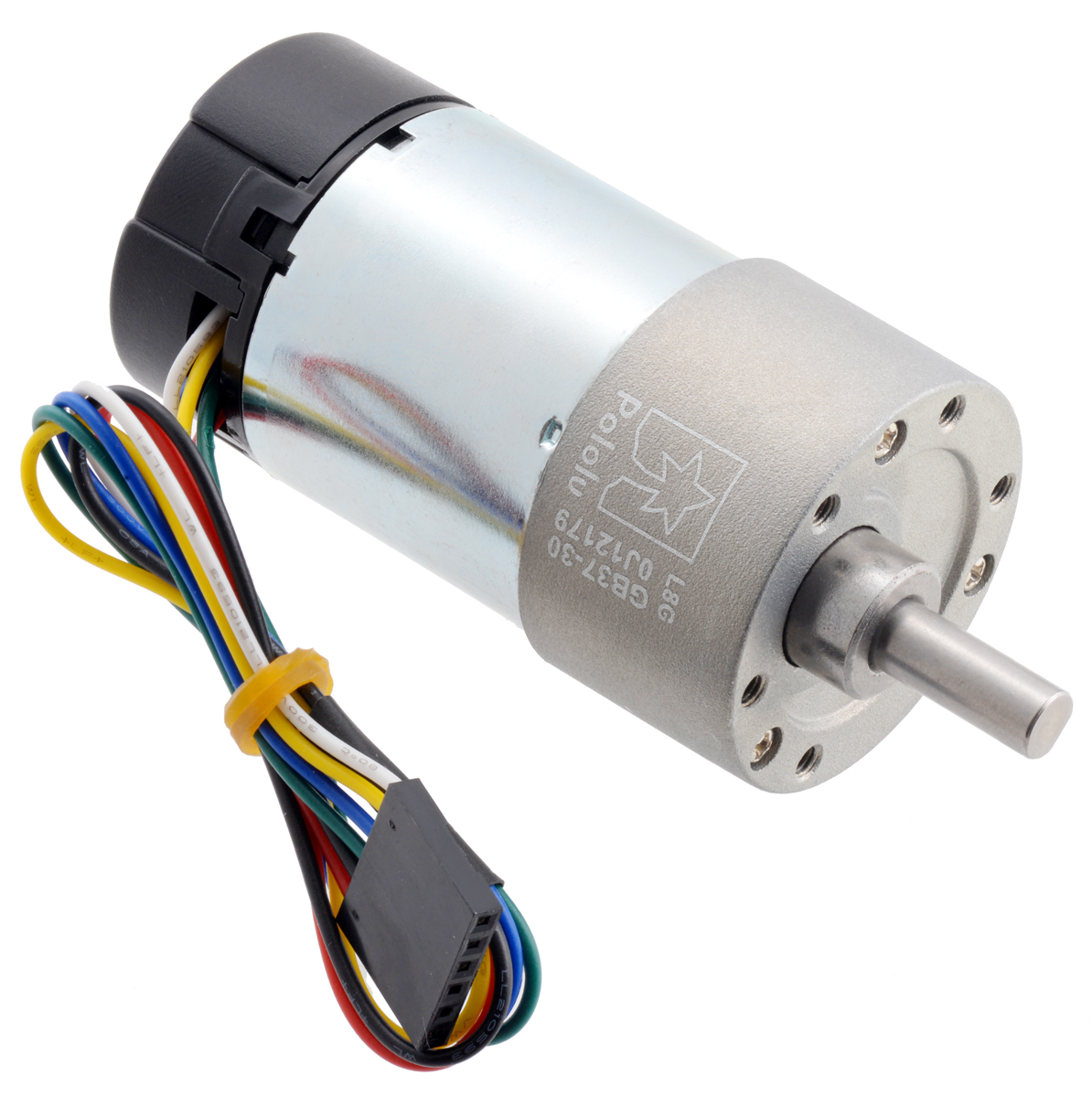 |
We are excited to share that we have expanded our line of 37D Metal Gearmotors to include 24 V options. These brushed DC gearmotors are the largest and most powerful we carry, measuring 37 mm (1.46″) in diameter. They are available in gear ratios ranging from 6.3:1 to 150:1 and with or without integrated 64 CPR quadrature encoders on the motor shafts. The 12 V and 24 V motors offer approximately the same performance at their respective nominal voltages, with the 24 V motor drawing half the current of the 12 V motor. The table below summarizes all of the options we now have available. Please see our newest revision of the 37D metal gearmotor datasheet (2MB pdf) for the full specifications and performance graphs for all the options.
| Rated Voltage |
Stall Current |
No-Load Current |
Gear Ratio | No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
 Without Encoder |
 With Encoder |
|
|---|---|---|---|---|---|---|---|---|---|
| (kg ⋅ cm) | (oz ⋅ in) | ||||||||
| 12 V | 5.5 A | 0.2 A | 1:1 (no gearbox) | 10,000 | 0.5 | 7 | – | – | item #4750 |
| 6.3:1 | 1600 | 3.0 | 42 | 12 | item #4747 | item #4757 | |||
| 10:1 | 1000 | 4.9 | 68 | 12 | item #4748 | item #4758 | |||
| 19:1 | 530 | 8.5 | 120 | 12 | item #4741 | item #4751 | |||
| 30:1 | 330 | 14 | 190 | 12 | item #4742 | item #4752 | |||
| 50:1 | 200 | 21 | 290 | 10 | item #4743 | item #4753 | |||
| 70:1 | 150 | 27 | 380 | 10* | item #4744 | item #4754 | |||
| 100:1 | 100 | 34 | 470 | 8* | item #4745 | item #4755 | |||
| 131:1 | 76 | 45 | 630 | 6* | item #4746 | item #4756 | |||
| 150:1 | 67 | 49 | 680 | 6* | item #2829 | item #2828 | |||
| 24 V | 3 A | 0.1 A | 1:1 (no gearbox) | 10,000 | 0.55 | 8 | – | – | item #4690 |
| 6.3:1 | 1600 | 3.5 | 49 | 14 | item #4688 | item #4698 | |||
| 10:1 | 1000 | 5.5 | 76 | 14 | item #4689 | item #4699 | |||
| 19:1 | 530 | 9.5 | 130 | 13 | item #4681 | item #4691 | |||
| 30:1 | 330 | 15 | 210 | 13 | item #4682 | item #4692 | |||
| 50:1 | 200 | 23 | 320 | 12 | item #4683 | item #4693 | |||
| 70:1 | 140 | 31 | 430 | 10* | item #4684 | item #4694 | |||
| 100:1 | 100 | 39 | 540 | 8* | item #4685 | item #4695 | |||
| 131:1 | 79 | 47 | 650 | 6* | item #4686 | item #4696 | |||
| 150:1 | 68 | 56 | 780 | 6* | item #4687 | item #4697 | |||
| * Output power for these units is constrained by gearbox load limits; spec provided is output power at max recommended load of 10 kg⋅cm. | |||||||||
Note: The listed stall torques and currents are theoretical extrapolations; units will typically stall well before these points as the motors heat up. Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for continuously applied loads is 10 kg-cm (150 oz-in), and the recommended upper limit for instantaneous torque is 25 kg-cm (350 oz-in). Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
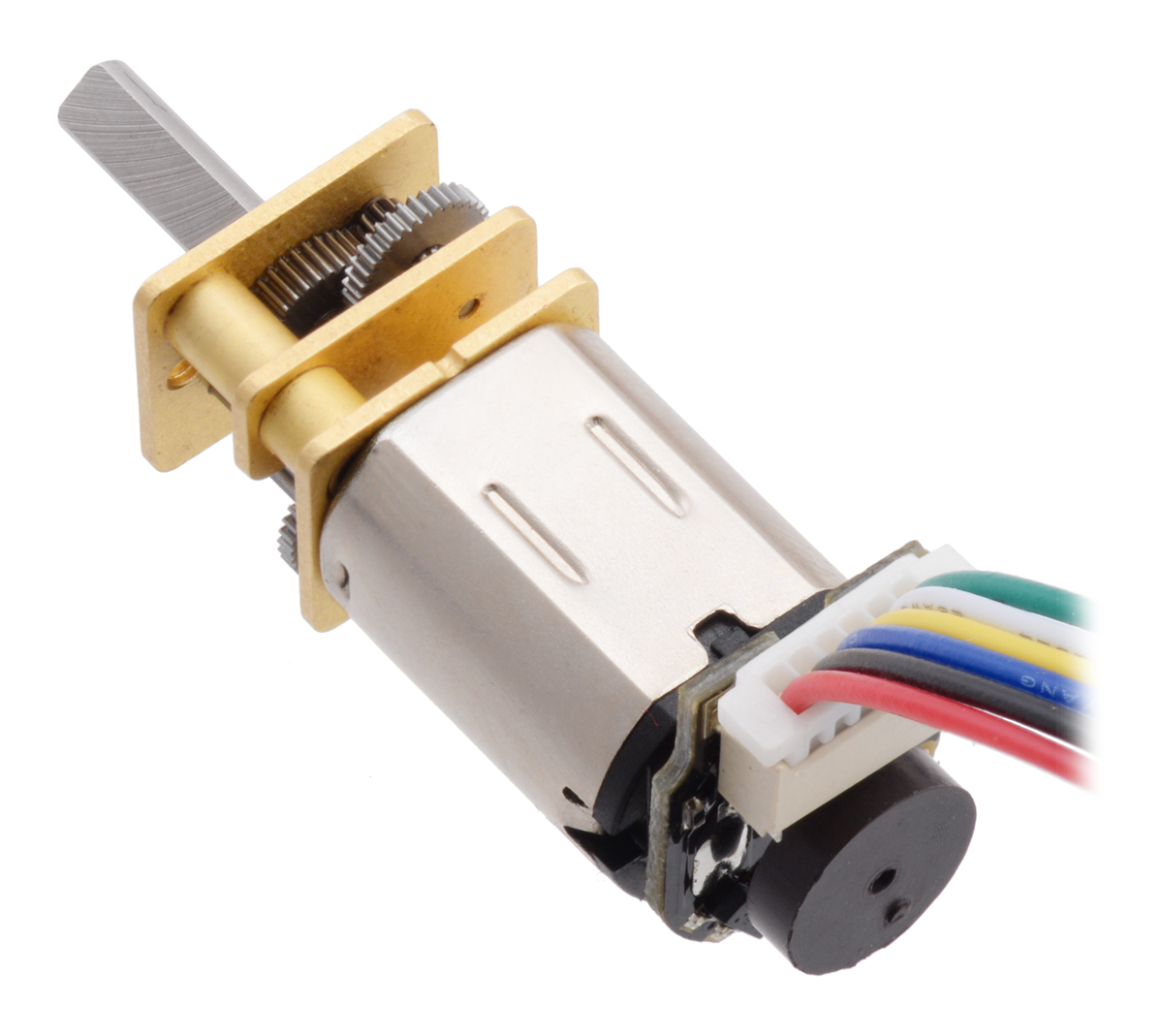
New products: micro metal gearmotors with 15:1 gear ratio
 |
We have expanded our line of micro metal gearmotors to include versions with a 15:1 gear ratio. As with all of our other micro metal gearmotors, these units are available with five different motor options:
 |
- Motors with precious metal brushes
- Motors with longer-life carbon brushes (HPCB)
Each motor is available with or without an extended back shaft, which rotates at the same speed as the input to the gearbox and offers a way to add an encoder, such as our encoders for micro metal gearmotors (see the picture above). This makes ten new versions in all:
| Rated Voltage |
Motor Type |
Stall Current (A) |
No-Load Current (A) |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
 Single-Shaft (Gearbox Only) |
 Dual-Shaft (Gearbox & Motor) |
|
|---|---|---|---|---|---|---|---|---|---|
| (kg ⋅ cm) | (oz ⋅ in) | ||||||||
| 12 V | high-power, carbon brushes (HPCB) |
0.75 | 0.06 | 2200 | 0.25 | 3.5 | 1.4 | 15:1 HPCB 12V | 15:1 HPCB 12V dual-shaft |
| 6 V | high-power, carbon brushes (HPCB) |
1.5 | 0.10 | 2100 | 0.25 | 3.5 | 1.3 | 15:1 HPCB 6V | 15:1 HPCB 6V dual-shaft |
| 6 V | high-power (HP) |
1.6 | 0.07 | 2000 | 0.30 | 4.2 | 1.5 | 15:1 HP 6V | 15:1 HP 6V dual-shaft |
| 6 V | medium-power (MP) |
0.67 | 0.04 | 1400 | 0.20 | 2.8 | 0.70 | 15:1 MP 6V | 15:1 MP 6V dual-shaft |
| 6 V | low-power (LP) |
0.36 | 0.02 | 860 | 0.17 | 2.4 | 0.37 | 15:1 LP 6V | 15:1 LP 6V dual-shaft |
More detailed specifications for all our micro metal gearmotors can be found in their datasheet (5MB pdf).
These new versions bring our total micro metal gearmotor selection to 130 options, with gear ratios ranging from 5:1 to 1000:1! To see them all, visit our micro metal gearmotor category, and visit our metal gearmotor category to see all of our metal gearmotor options. Keep in mind if you don’t see an option that suits your application, for sufficient volumes, modifications such as customized output shafts are available.
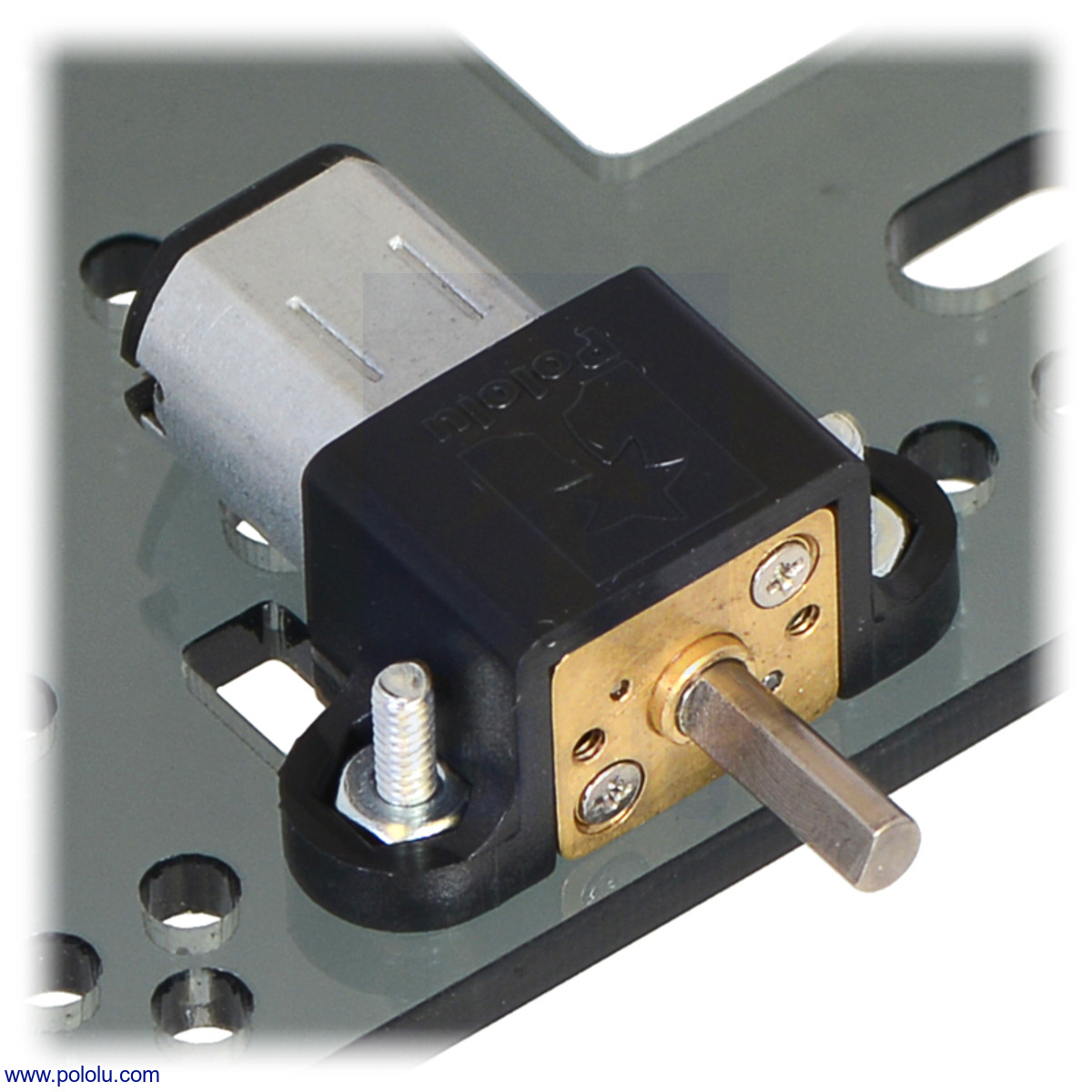
Once you find the perfect gearmotors for your project, don’t forget to check out our great selection of accessories. These were all designed either specifically for our micro metal gearmotors or with their compatibility in mind:
- Wheels and tracks
- Universal mounting hubs with #2-56, #4-40, or M3 holes.
- 12mm Hex Wheel Adapter for 3mm Shaft
- Mounting brackets in white, black, or extended options
- Magnetic and optical encoders
|
|
|


Related products




Our sale has ended, but visit our specials category for great deals all year long!
 |
Our Black Friday Sale has come to an end. As we ship out the last of our Cyber Monday orders, we’d like to point out our Specials category where you can find great deals on Pololu products any time of the year! For the last couple years, we’ve released most of our new products with special intro coupons. If you see a product’s intro banner listed in the specials category, its intro coupon is still active! There’s lots of great deals waiting to be used up, so make sure to have a look before you place your next order!


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










