Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 20)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Wirelessly-controlled robot with PIC and nRF24L01+
In this video, Amjad Al-Ahdal demonstrates his wirelessly-controlled robot with multiple modes that he programmed in C. The robot contains a PIC18F2455 microcontroller, an nRF24L01+ transceiver, a SN754410 motor driver IC, a Pololu wheel and encoder set, and two 100:1 Micro Metal Gearmotors. Its controller has a homemade keypad, another transceiver, a 9DOF sensor, and a serial 16×2 LCD screen.
Featured link: http://www.youtube.com/watch?v=Z1oRE5TTVFU
The Robot Quartet
The Robot Quartet is an art installation by Andres Wanner that features four marker-equipped 3pi robots working together to create drawings. The robots receive identical commands and draw repetitive patterns on the same surface.
 |
You can see more pictures of the completed artworks on Andres’s website.
Featured link: http://www.pixelstorm.ch/pro_robotquartet.php
Node.js module for Maestro servo controllers
 |
The node-pololumaestro project is a module for the Node.js platform that allows you to control a Maestro USB Servo Controller over its serial interface from a Node.js program. This module provides functions like maestro.setTarget(0, 1500) and internally takes care of assembling the bytes of the serial command for you. The module was written by Owen McAree and was recently expanded by achingbrain. We always like to see our customers helping each other through projects like this!
Featured link: https://npmjs.org/package/pololu-maestro
Adding audio to an m3pi with a SpeakJet
In this video, Jerry Guttman shows off his Pololu m3pi Robot combined with the SpeakJet Phraselator Speech Development System. The SpeakJet chip was developed by Magnevation and allows for speech synthesis and robot sound effects.
Featured link: http://www.youtube.com/watch?v=dYWQB12Ibsw
ServoScribe Setup and Tutorial
In this video, Brian Patton demonstrates how to program an animatronic robot using a Maestro Servo Controller. He covers basic configuration using the Maestro Control Center and shows how to sync voice with servo motion using software from his company Robodyssey.
Featured link: http://www.youtube.com/watch?v=Yop9Zk2HJMU
Video tutorial: Arduino wiring basics
Just getting started with electronics? Take a look at this video to get some tips on keeping your wiring neat and clean using our pre-crimped wires and crimp connector housings.
Featured link: http://www.youtube.com/watch?v=vEHlwq3CHk4
Video tutorial: working with custom cables and connectors
In this video, Derek Molloy shows you how to make custom cables using our pre-crimped wires and crimp connector housings and does a great job of showing how to use our crimp tool properly.
Featured link: http://www.youtube.com/watch?v=GkbOJSvhCgU
Paper ROM and balsa wood airplane
Customer Mike Kohn recently wrote to us about two of his projects that use Pololu parts:
 |
This paper disk is marked with black and white patterns spread across four distinct rings and can store a total of 16 bytes of data. Mike decodes the data with one of our QTR-1RC reflectance sensors. Read more about “PAPER-ROM”…
 |
This balsa wood airplane uses an ATtiny85 to interpret signals from a Syma S107 helicopter remote controller, and it uses our 5:1 micro metal gearmotor HP to spin its propeller. Read more about this airplane project…
Mike has documented many of his other software and electronics projects on his web site.
Dagu Rover 5 controlled by a Raspberry Pi
Pololu forum user chrisptx posted this video of his Dagu Rover 5. He is using a Raspberry Pi as the main controller and sending signals to a TReX Jr Dual Motor Controller for drive control.
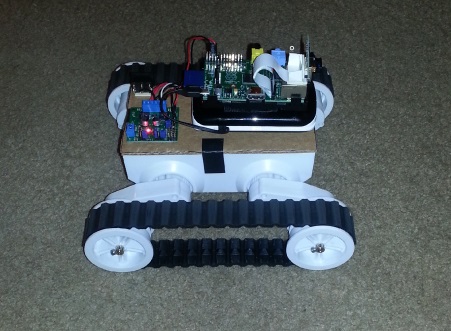 |
This rover is controlled by a Samsung Galaxy S3 smartphone, which uses its web browser to send commands to the Raspberry Pi in Javascript.
 |
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7250
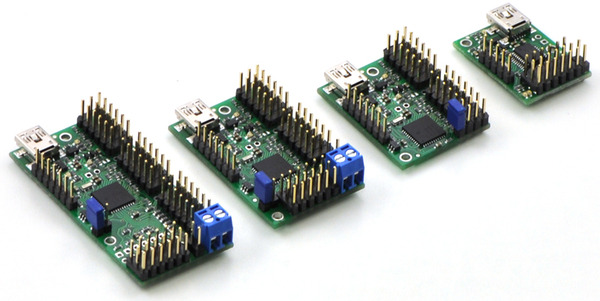
Controlling a Maestro in C using a Raspberry Pi
 |
Shahmir Javaid tweeted about a tutorial he wrote that describes how he used a Raspberry Pi to control a Maestro servo controller in C. His tutorial documents the steps he took, including setting up the Raspberry Pi for UART, wiring, and programming. The setup is simple, and the code is provided.
Featured link: http://shahmirj.com/blog/raspberry-pi-and-pololu-servo-controller-using-c


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation









