

This is a merged information page for Item #2966.
View normal product page.
Pololu item #:
2966
Brand:
Pololu
Status:
Active and Preferred

This breakout board for the MPS MP6500 microstepping bipolar stepper motor driver has a pinout and interface that are very similar to that of our popular A4988 carriers, so it can be used as a drop-in replacement for those boards in many applications. The MP6500 offers up to 1/8-step microstepping, operates from 4.5 V to 35 V, and can deliver up to approximately 1.5 A per phase continuously without a heat sink or forced air flow (up to 2.5 A peak). This version of the board uses an on-board trimmer potentiometer for setting the current limit, and the board ships with 0.1″ male header pins included but not soldered in.
Alternatives available with variations in these parameter(s): current limit control header pins soldered? Select variant…
 Compare all products in MP6500 Stepper Motor Driver Carriers or 16-pin Stepper Motor Drivers.
Compare all products in MP6500 Stepper Motor Driver Carriers or 16-pin Stepper Motor Drivers.
|
MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control with included header pins. |
|---|
 |
MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control. |
|---|
 |
MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control, top view. |
|---|
 |
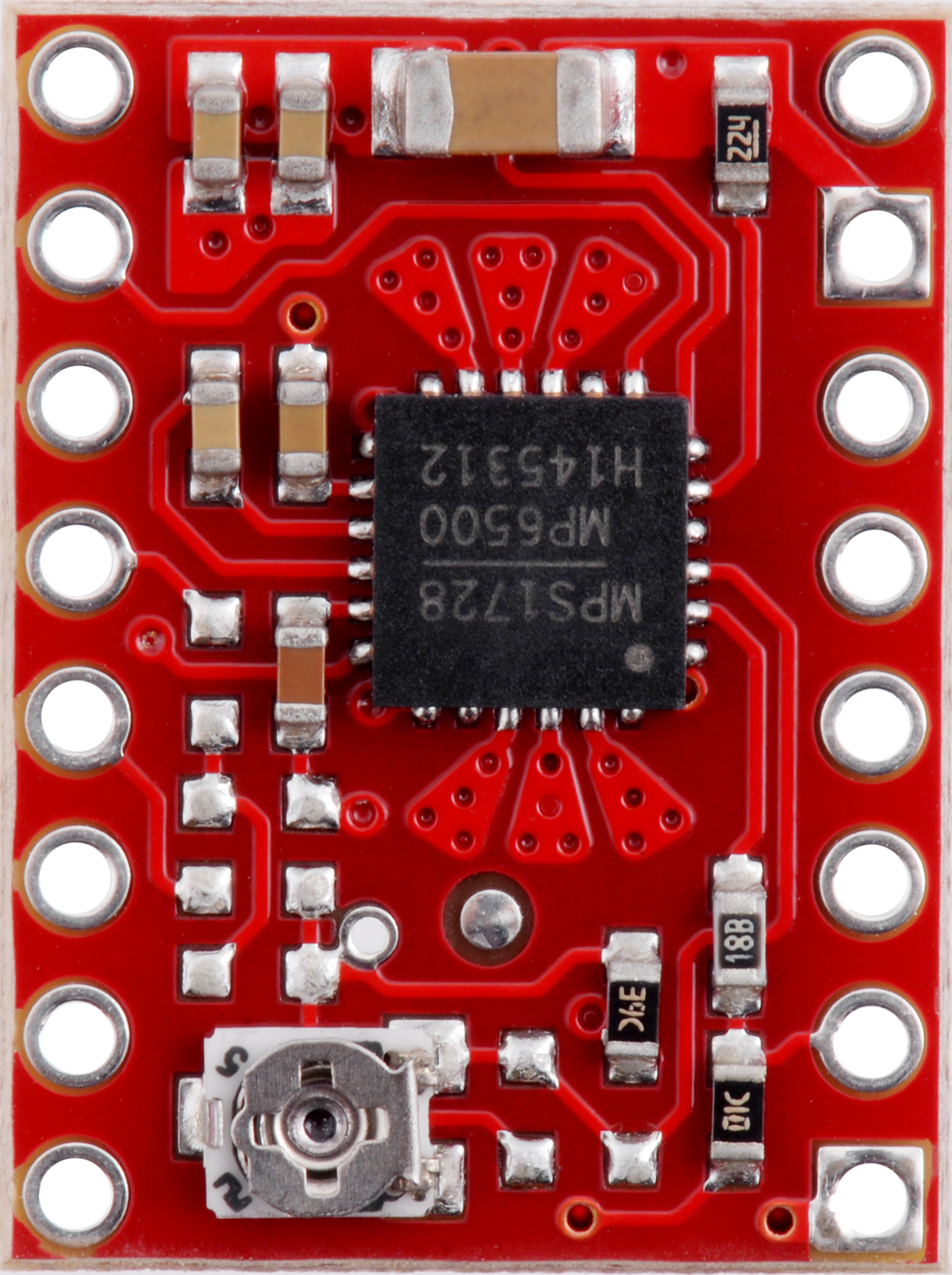
MP6500 Stepper Motor Driver Carrier, bottom view. |
|---|
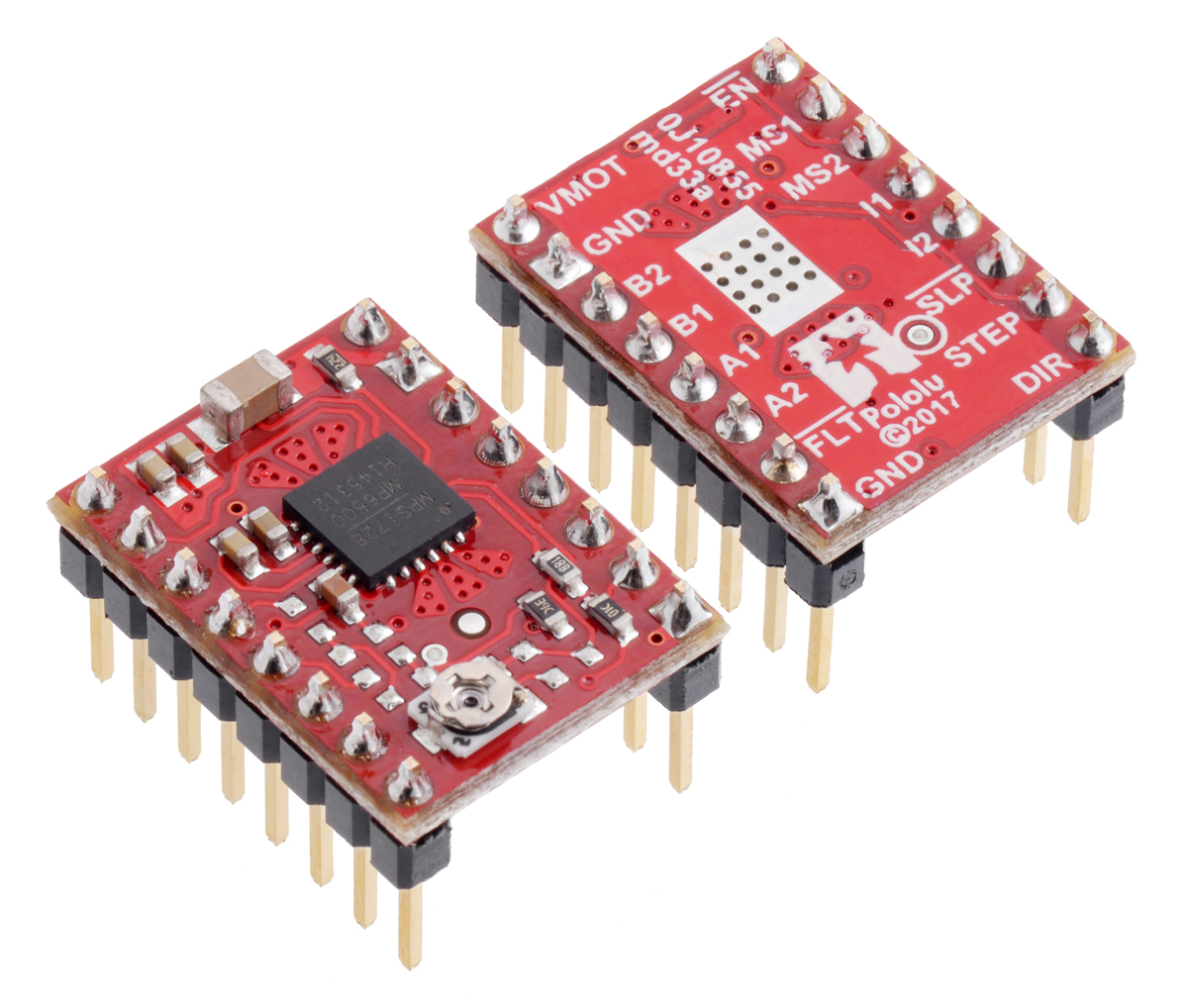 |
MP6500 Stepper Motor Driver Carriers, Potentiometer Current Control with included header pins soldered. |
|---|
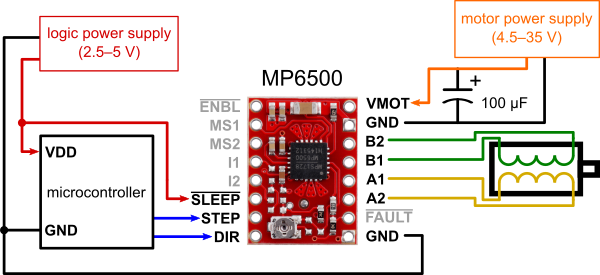 |
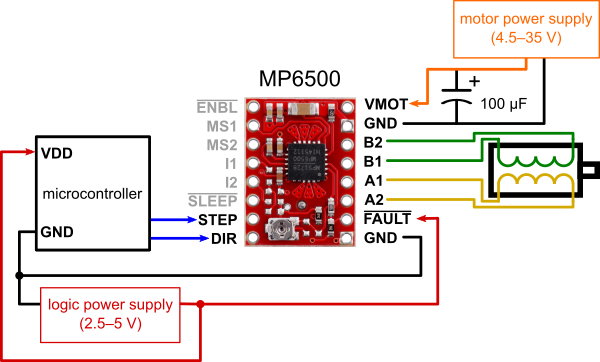
Minimal wiring diagram for connecting a microcontroller to an MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control (full-step mode). |
|---|
 |
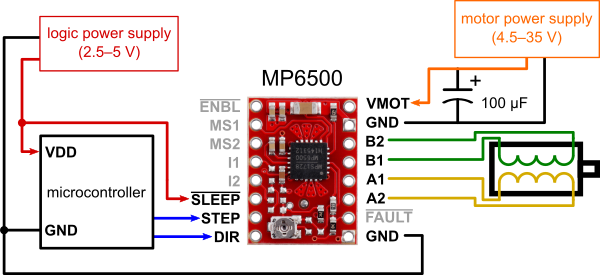
Alternative minimal wiring diagram for connecting a microcontroller to an MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control (full-step mode). |
|---|
 |
Current limit vs. potentiometer setting for the MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control. |
|---|
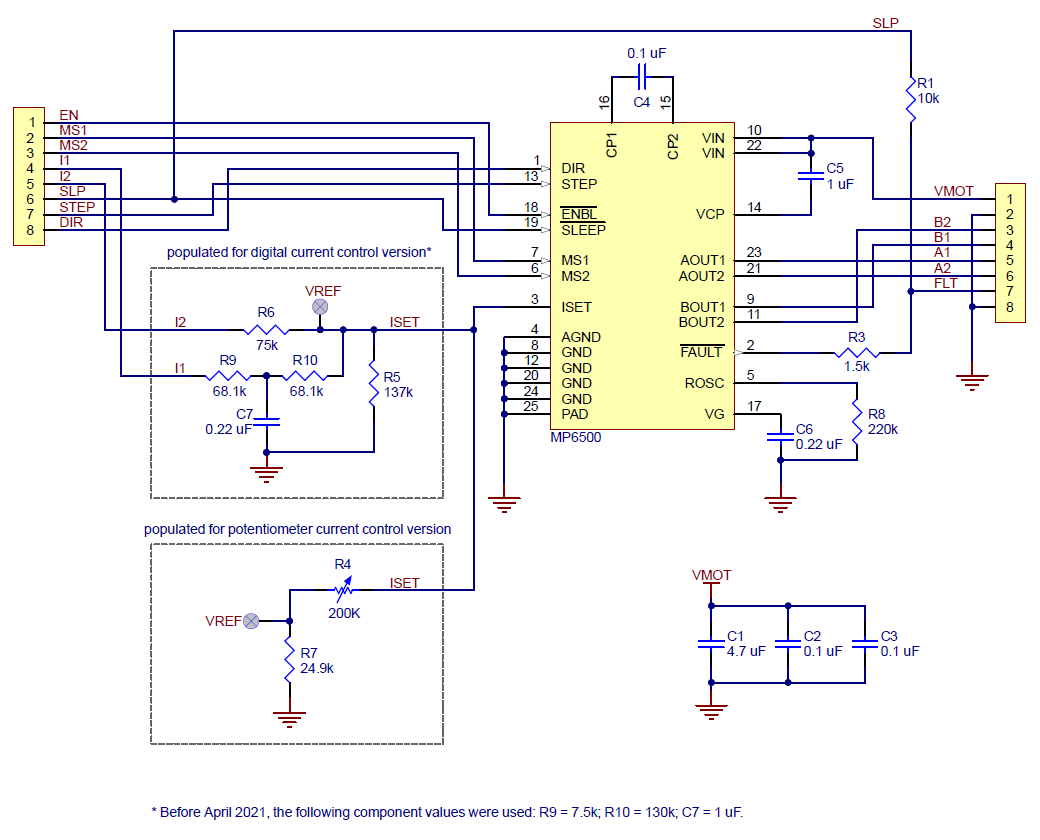 |
Schematic diagram for the MP6500 Stepper Motor Driver Carrier. |
|---|
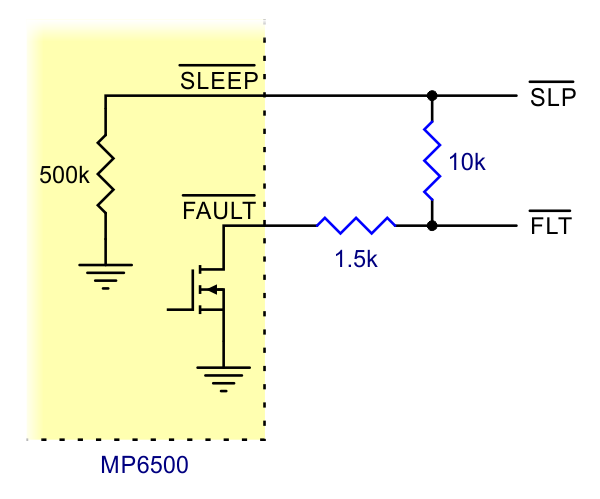 |
Schematic of nSLEEP and nFAULT pins on MP6500 carrier. |
|---|
|
MP6500 Stepper Motor Driver Carrier, bottom view. |
|---|
This product is a carrier board or breakout board for the MP6500 stepper motor driver from Monolithic Power Systems (MPS); we therefore recommend careful reading of the MP6500 datasheet (1MB pdf) before using this product. This stepper motor driver lets you control one bipolar stepper motor at up to approximately 1.5 A per phase continuously without a heat sink or forced air flow (see the Power dissipation considerations section below for more information). Here are some of the driver’s key features:
This product ships with all surface-mount components—including the MP6500 driver IC—installed as shown in the product picture.
We also have a variety of other stepper motor driver options in this same form factor with different operating profiles and features.
Some unipolar stepper motors (e.g. those with six or eight leads) can be controlled by this driver as bipolar stepper motors. For more information, please see the frequently asked questions. Unipolar motors with five leads cannot be used with this driver.
This version of the MP6500 Stepper Motor Driver Carrier uses an on-board trimmer potentiometer to set the current limit. Header pins are included but not soldered (see item #2967 for a version of this carrier with header pins already installed).
We also carry a version of this carrier that offers digital current control, which allows a microcontroller to make dynamic current limit adjustments.
The MP6500 stepper motor driver carrier ships with one 1×16-pin breakaway 0.1″ male header. The headers can be soldered in for use with solderless breadboards or 0.1″ female connectors. You can also solder your motor leads and other connections directly to the board.
|
|
 |
Minimal wiring diagram for connecting a microcontroller to an MP6500 Stepper Motor Driver Carrier, Potentiometer Current Control (full-step mode). |
|---|
The driver requires a motor supply voltage of 4.5 V to 35 V to be connected across VMOT and GND. This supply should have appropriate decoupling capacitors close to the board, and it should be capable of delivering the expected stepper motor current. The driver has an internal voltage regulator, so it does not require a logic voltage supply.
Warning: This carrier board uses low-ESR ceramic capacitors, which makes it susceptible to destructive LC voltage spikes, especially when using power leads longer than a few inches. Under the right conditions, these spikes can exceed the 40 V absolute maximum voltage rating for the MP6500 and permanently damage the board, even when the motor supply voltage is as low as 12 V. One way to protect the driver from such spikes is to put a large (at least 47 µF) electrolytic capacitor across motor power (VMOT) and ground somewhere close to the board.
Four, six, and eight-wire stepper motors can be driven by the MP6500 if they are properly connected; a FAQ answer explains the proper wirings in detail.
Warning: Connecting or disconnecting a stepper motor while the driver is powered can destroy the driver. (More generally, rewiring anything while it is powered is asking for trouble.)
Stepper motors typically have a step size specification (e.g. 1.8° or 200 steps per revolution), which applies to full steps. A microstepping driver such as the MP6500 allows higher resolutions by allowing intermediate step locations, which are achieved by energizing the coils with intermediate current levels. For instance, driving a motor in quarter-step mode will give the 200-step-per-revolution motor 800 microsteps per revolution by using four different current levels.
The resolution (step size) selector inputs (MS1 and MS2) enable selection from the four step resolutions according to the table below. These two pins are pulled low through internal 500 kΩ pull-down resistors, so the driver defaults to full-step mode when these inputs are left disconnected. For the microstep modes to function correctly, the current limit must be set low enough (see below) so that current limiting gets engaged. Otherwise, the intermediate current levels will not be correctly maintained, and the motor will skip microsteps.
| MS1 | MS2 | Microstep Resolution |
|---|---|---|
| Low | Low | Full step |
| High | Low | Half (1/2) step |
| Low | High | Quarter (1/4) step |
| High | High | Eighth (1/8) step |
Each pulse to the STEP input corresponds to one microstep of the stepper motor in the direction selected by the DIR pin. These inputs are both pulled low by default through internal 500 kΩ pull-down resistors. If you just want rotation in a single direction, you can leave DIR disconnected.
The chip has two different inputs for controlling its power states: SLEEP and ENBL. For details about these power states, see the datasheet. Please note that the driver pulls both of these pins low through internal 500 kΩ pull-down resistors. The default SLEEP state prevents the driver from operating; this pin must be high to enable the driver (it can be connected directly to a logic “high” voltage between 2.5 V and 5 V, or it can be dynamically controlled by connecting it to a digital output of an MCU). The default state of the ENBL pin is to enable the driver, so this pin can be left disconnected.
The datasheet does not describe how SLEEP and ENBL affect the driver’s internal logic, but based on our testing, bringing SLEEP low disables and resets the entire driver (including the microstep position) while bringing ENBL high disables only the motor outputs while retaining the microstep position.
|
Schematic of nSLEEP and nFAULT pins on MP6500 carrier. |
|---|
The MP6500 also features an open-drain FAULT output that drives low whenever the H-bridge FETs are disabled as the result of over-current protection, over-voltage protection, thermal shutdown, or under-voltage lockout protection. The carrier board connects this pin to the SLEEP pin through a 10 kΩ resistor that acts as a FAULT pull-up whenever SLEEP is externally held high, so no external pull-up is necessary on the FAULT pin. Note that the carrier includes a 1.5 kΩ protection resistor in series with the FAULT pin that makes it is safe to connect this pin directly to a logic voltage supply, as might happen if you use this board in a system designed for the pin-compatible A4988 carrier. In such a system, the 10 kΩ resistor between SLEEP and FAULT would then act as a pull-up for SLEEP, making the MP6500 carrier more of a direct replacement for the A4988 in such systems (the A4988 has an internal pull-up on its SLEEP pin).
As a consequence of the connection between SLEEP and FAULT, active faults can pull the SLEEP pin low (below 2.1 V) if it is not externally pulled up strongly enough. We recommend any pull-up resistor used with SLEEP be 4.7 kΩ or stronger (or just connect SLEEP directly to VCC).
To achieve high step rates, the motor supply is typically higher than would be permissible without active current limiting. For instance, a typical stepper motor might have a maximum current rating of 1 A with a 5 Ω coil resistance, which would indicate a maximum motor supply of 5 V. Using such a motor with 9 V would allow higher step rates, but the current must actively be limited to under 1 A to prevent damage to the motor.
The MP6500 supports such active current limiting, and the trimmer potentiometer on the board can be used to set the current limit:
|
You will typically want to set the driver’s current limit to be at or below the current rating of your stepper motor. One way to set the current limit is to put the driver into full-step mode and to measure the current running through a single motor coil without clocking the STEP input. The measured current will be 0.7 times the current limit (since both coils are always on and limited to approximately 70% of the current limit setting in full-step mode).
Another way to set the current limit is to measure the VREF voltage and calculate the resulting current limit. The VREF pin voltage is accessible via a small hole that is circled on the bottom silkscreen of the circuit board. The current limit in amps relates to the reference voltage in volts as follows:
``text(Current Limit) = text(VREF) * 3.17``
or, rearranged to solve for VREF:
``text(VREF) = text(Current Limit) / 3.17``
So, the current limit in amps (A) is equal to 3.17 times the VREF voltage in volts (V), and if you have a stepper motor rated for 1 A, for example, you can set the current limit to about 1 A by setting the reference voltage to about 0.32 V. The I1 and I2 pins are not used on this version of the MP6500 Stepper Motor Driver Carrier, and any signals applied to these pins will have no effect on the operation of the driver.
Note: The coil current can be very different from the power supply current, so you should not use the current measured at the power supply to set the current limit. The appropriate place to put your current meter is in series with one of your stepper motor coils. If the driver is in full-step mode, both coils will always be on and limited to approximately 70% of the current limit setting. If your driver is in one of the microstepping modes, the current through the coils will change with each step, ranging from 0% to 100% of the set limit. See the MP6500 datasheet for more information.
The MP6500 driver IC has a maximum current rating of 2.5 A per coil, but the actual current you can deliver depends on how well you can keep the IC cool. The carrier’s printed circuit board is designed to draw heat out of the IC, but to supply more than approximately 1.5 A per coil, a heat sink or other cooling method is required. Note that the version of this board with digital current control has a maximum current limit setting of around 2 A.
This product can get hot enough to burn you long before the chip overheats. Take care when handling this product and other components connected to it.
Please note that measuring the current draw at the power supply will generally not provide an accurate measure of the coil current. Since the input voltage to the driver can be significantly higher than the coil voltage, the measured current on the power supply can be quite a bit lower than the coil current (the driver and coil basically act like a switching step-down power supply). Also, if the supply voltage is very high compared to what the motor needs to achieve the set current, the duty cycle will be very low, which also leads to significant differences between average and RMS currents. Additionally, please note that the coil current is a function of the set current limit, but it does not necessarily equal the current limit setting as the actual current through each coil changes with each microstep.
|
Schematic diagram for the MP6500 Stepper Motor Driver Carrier. |
|---|
This schematic is also available as a downloadable pdf (106k pdf).
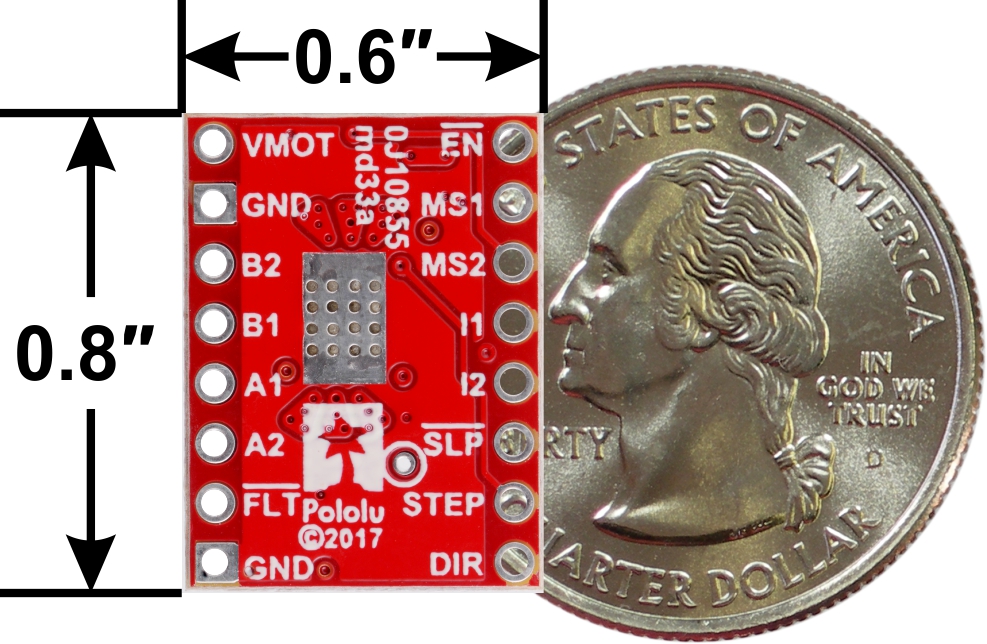
| Size: | 0.6″ × 0.8″ |
|---|---|
| Weight: | 1.4 g1 |
| Minimum operating voltage: | 4.5 V |
|---|---|
| Maximum operating voltage: | 35 V |
| Continuous current per phase: | 1.5 A2 |
| Maximum current per phase: | 2.5 A3 |
| Minimum logic voltage: | 2.1 V4 |
| Maximum logic voltage: | 6 V5 |
| Microstep resolutions: | full, 1/2, 1/4, and 1/8 |
| Current limit control: | potentiometer |
| Reverse voltage protection?: | N |
| Header pins soldered?: | N |
| PCB dev codes: | md33a, md33b |
|---|---|
| Other PCB markings: | 0J10855, 0J11019 |
This DXF drawing shows the locations of all of the board’s holes.
Yes. To avoid damaging your stepper motor, you want to avoid exceeding the rated current, which is 600 mA in this instance. All of our stepper motor drivers let you limit the maximum current, so as long as you set the limit below the rated current, you will be within spec for your motor, even if the voltage exceeds the rated voltage. The voltage rating is just the voltage at which each coil draws the rated current, so the coils of your stepper motor will draw 600 mA at 3.9 V. By using a higher voltage along with active current limiting, the current is able to ramp up faster, which lets you achieve higher step rates than you could using the rated voltage.
If you do want to use a lower motor supply voltage for other reasons, consider using our DRV8834 or STSPIN-220 low-voltage stepper motor drivers.
Yes, you do! Setting the current limit on your stepper motor driver carrier is essential to making sure that it runs properly. An appropriate current limit also ensures that your motor is not allowed to draw more current than it or your driver can handle, since that is likely to damage one or both of them.
For the MP6500 with digital current control, the details for setting the current limit can be found in the product description.
For the MP6500 with potentiometer current control, the current limit is set by adjusting its potentiometer. We strongly recommend using a multimeter to measure the VREF voltage while setting the current limit so you can be sure you set it to an appropriate value (just turning the pot randomly until things seem to work is not a good approach). The following video has more details on setting the current limit:
Measuring the current draw at the power supply does not necessarily provide an accurate measure of the coil current. Since the input voltage to the driver can be significantly higher than the coil voltage, the measured current on the power supply can be quite a bit lower than the coil current (the driver and coil basically act like a switching step-down power supply). Also, if the supply voltage is very high compared to what the motor needs to achieve the set current, the duty cycle will be very low, which also leads to significant differences between average and RMS currents: RMS current is what is relevant for power dissipation in the chip but many power supplies won’t show that. You should base your assessment of the coil current on the set current limit or by measuring the actual coil currents.
Please note that while the MP6500 driver is rated for up to 2.5 A (peak) per coil, the carrier by itself will overheat at lower currents. We have found that it generally requires a heat sink to deliver more than approximately 1.5 A per coil, but this number depends on factors such as ambient temperature and air flow. For example, sealing three MP6500 driver carriers in close proximity in a small box will cause them to overheat at lower currents than a unit by itself in open air.

We’ve been hard at work over the past week putting up lots of new (but perhaps familiar-seeming) products. Here’s a quick recap: 24 new QTR...

We are excited to expand our colorful selection of stepper motor drivers with carrier boards for the brand new MPS MP6500 stepper motor...