Pololu Blog » User Profile: Grant »
Posts by Grant
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Creepy eyes Halloween prop upgrade

There are only a couple days left in our Halloween sale! Visit the sale page for more information, and if you are in need of some inspiration, check out our Halloween-tagged blog posts for some sample projects, including this upgrade to my creepy eyes prop:
 |
I finally got around to upgrading my creepy eyes Halloween prop. As shown above, I mounted the mask on a picture frame to make it more presentable. I also added some of our VL53L0X time-of-flight distance sensor carriers so that the eyes could follow people in front of the mask. I camouflaged the sensors behind the black layer of foam behind the mask. Below is an image showing how the sensors were hidden in the lower corners of the picture frame:
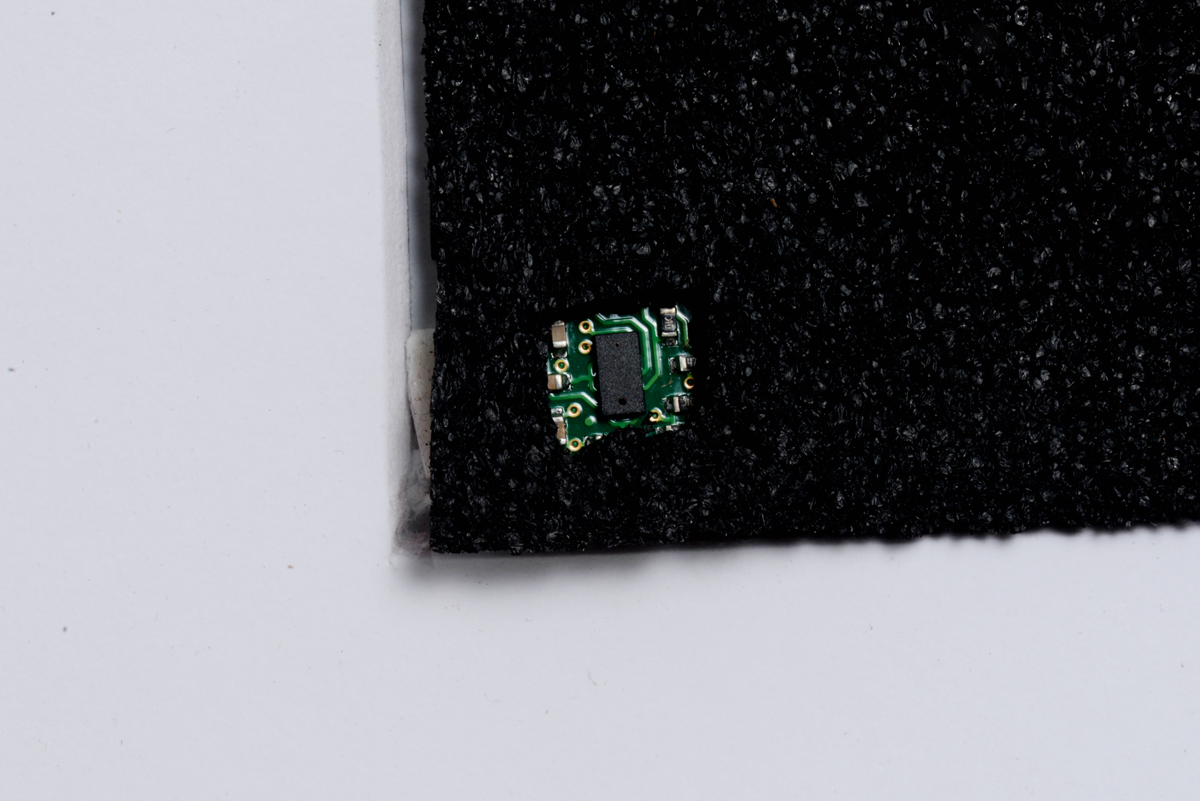 |
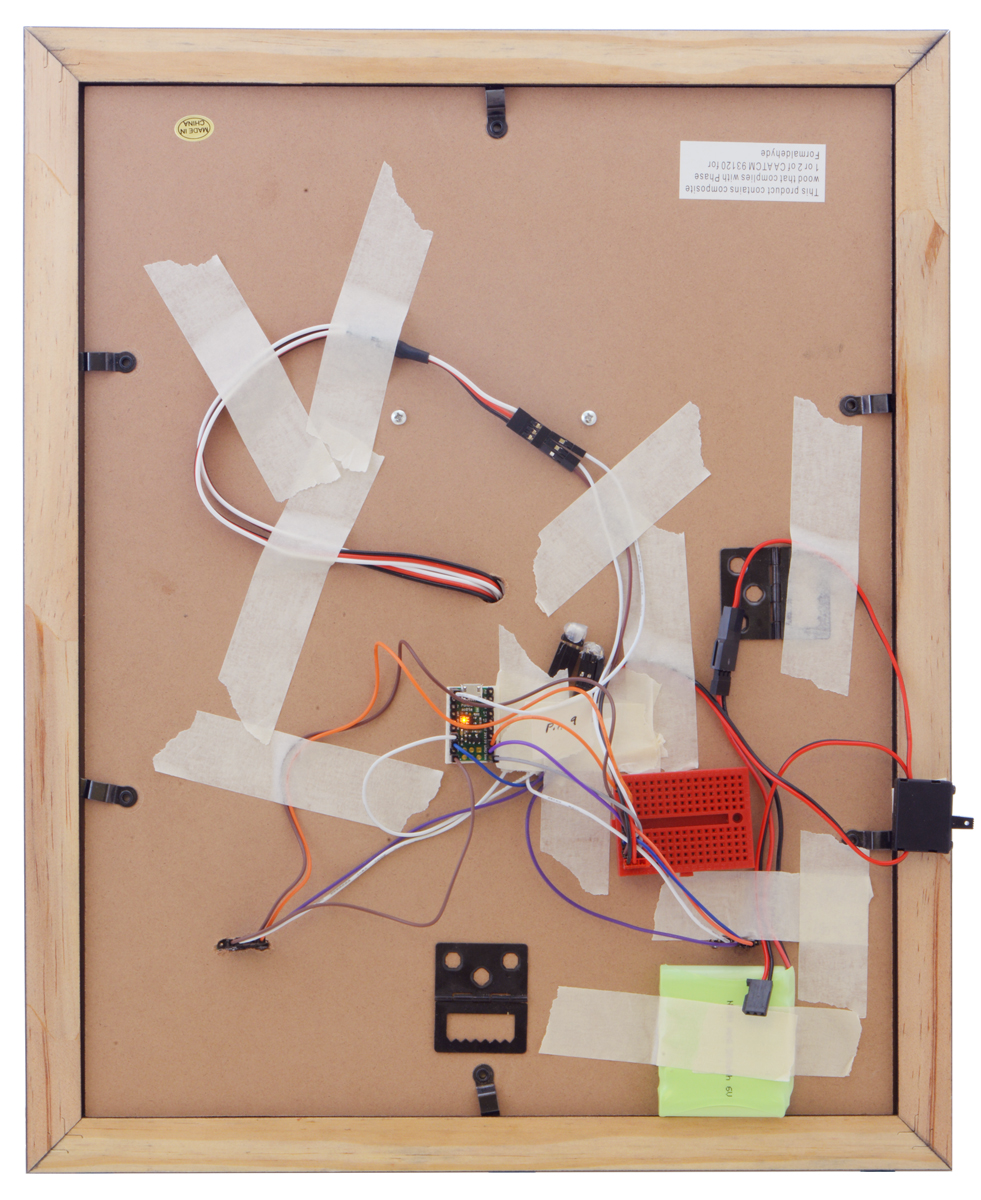
I also swapped the Maestro out for an A-Star 32U4 micro, so I could communicate with the sensors through I²C. Due to switching to the A-star micro, I added one of our small solderless breadboards to help distribute power and a servo Y splitter cable since both sub-micro servos can use the same signal. I also added a power switch and used some of our premium jumper wires to make connections. You can see all the electronics taped to the back of the picture frame in the picture below.
|
|

Related products




RC crawling skeleton

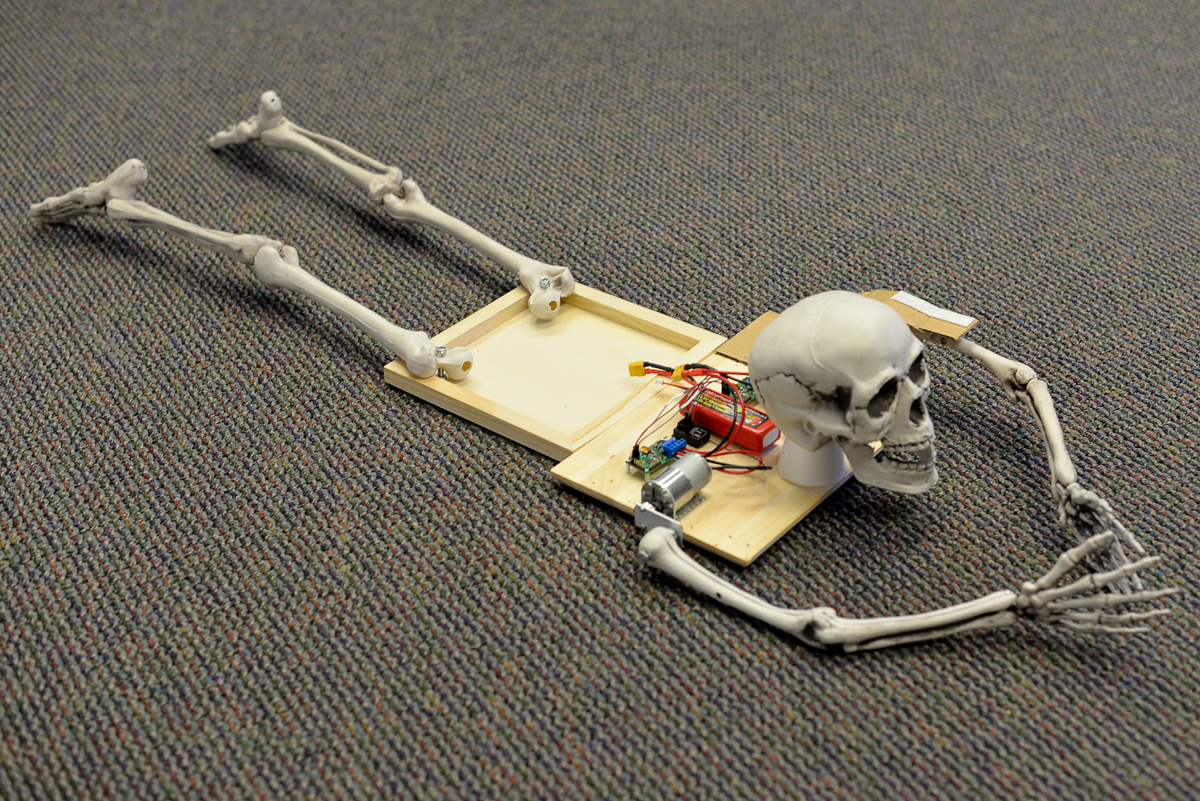
Our Halloween sale is still going strong! Visit the sale page for more information, and if you are in need of some inspiration, check out our Halloween-tagged blog posts for some sample projects, like this simple RC crawling skeleton that I made:
 |
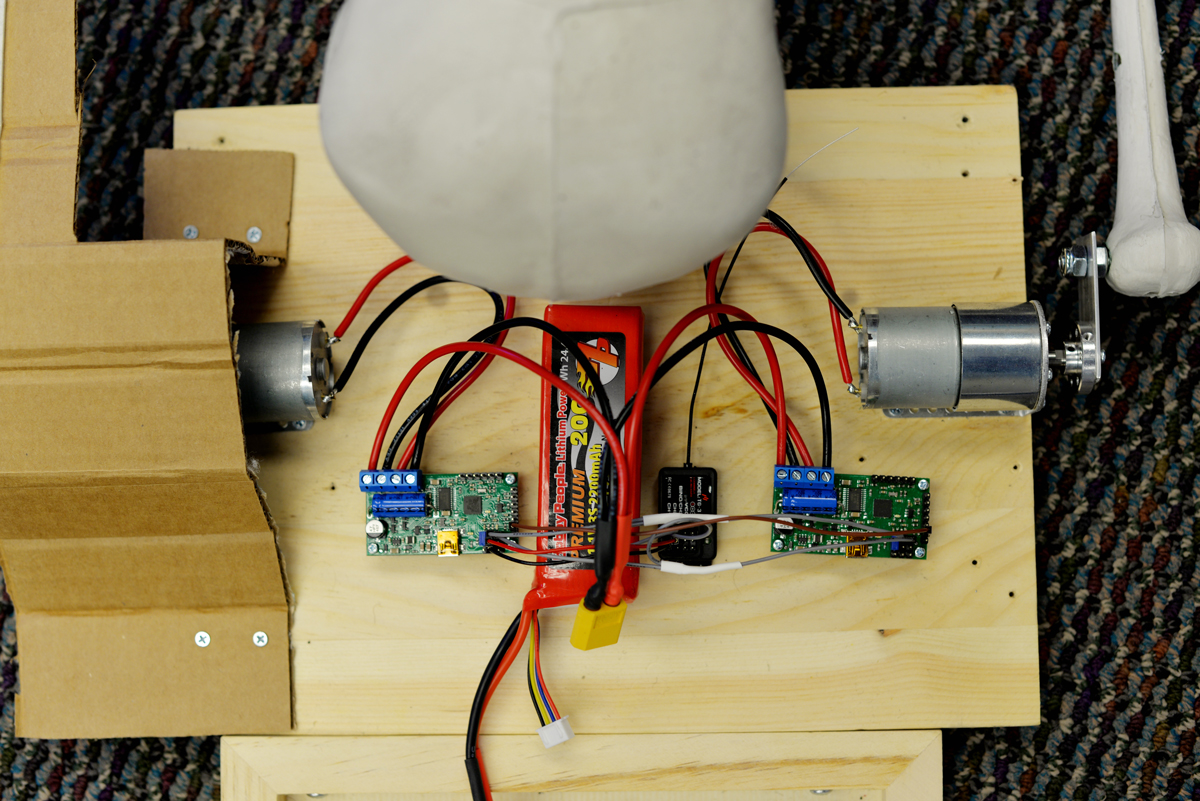
The setup for this project is pretty straightforward: a hobby RC transmitter sends signals through its receiver to a pair of Simple Motor Controllers, which each control a 37D mm gearmotor. The motors mount to a wooden base with a pair of L-brackets and connect to skeleton arms via universal aluminum mounting hubs and a short length of aluminum plating. The offset created by the aluminum plating causes the skeleton to move in a way that makes it look like it is slowly inching towards its next victim!
 |
A 3S LiPo provides power to the system through a pair of XT60 connectors, and the RC connections are made through some spliced female-female premium jumper wires. A black T-shirt covers up the electronics and a pair of cardboard “shoulder pads” help ensure the tee does not get tangled up in the rotation of the arm-bones.
|
|
In practice, the crawling skeleton is more amusing than scary: it crawls really slowly and the sound of the motors turning is too industrial/mechanical to haunt anyone’s dreams. The sound is, however, loud enough to startle any unsuspecting friends!
Related products




TwoPotatoe and ThreePotatoe compete at AVC
 |
I am happy to bring some overdue attention to our customer who created TwoPotatoe, a balancing robot that I first wrote about on this blog a few years ago. This past fall, TwoPotatoe and his new robot ThreePotatoe competed in the Sparkfun AVC Competition. TwoPotatoe won first place for the 10 lb to 25 lb weight class. Check out the AVC video below! TwoPotatoe starts its run at about 53:00. ThreePotatoe won second place in the 25 lb to 40 lb weight class. Considering all the weight classes together, TwoPotatoe and ThreePotatoe scored third and fourth place overall, which is very impressive considering they were competing against four-wheeled robots that didn’t have to balance. ThreePotatoe’s run starts at about 1:08:30.
You can find more pictures and information about TwoPotatoe and ThreePotatoe in the AVC competition on the TwoPotatoe website.
Related products



Control a GoPro remotely using a CamDo Bullet and RC switch
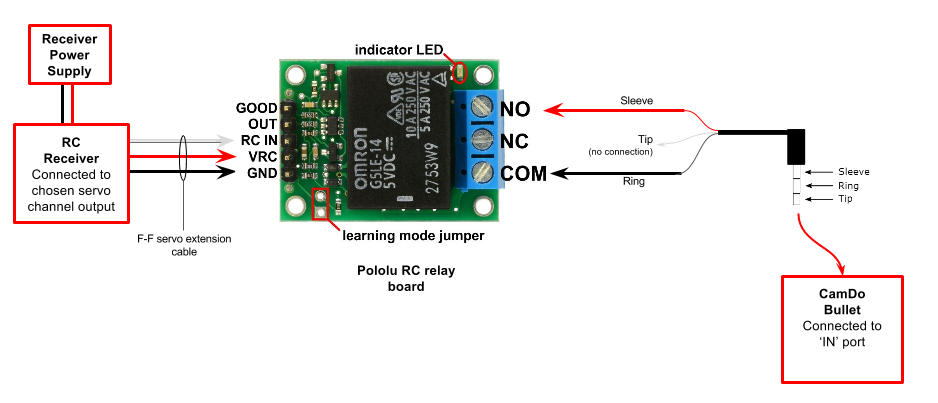 |
When capturing photographs of wildlife, it is not always feasible to be close enough to trigger your camera with a standard wired remote. In these cases, using an RC transmitter and receiver pair would be ideal, but most cameras and their remotes do not accept hobby RC signals. This blog post, written by CamDo, explains how to use one of our RC switches with a built-in relay and their Bullet wired remote interface to trigger a GoPro camera from an RC transmitter from hundreds of meters away. The setup can be used with any standard RC transmitter and receiver pair, and you only need one pair and one RC switch to control several cameras at once.


Pololu ball casters used as "feet" for quadcopter
 |
One of our customers, Jeff, found a creative way to use some of our 1″ ball casters. He was having a problem with the legs of his quadcopter “grabbing” when he landed, so he attached a ball caster to the end of each leg. You could read more about his modification and find more pictures of his quadcopter in his post on the RCGroups.com forum.
Related products

MSOE underwater robotics ROV
 |
The Milwaukee School of Engineering (MSOE) underwater robotics team has been building remotely operated vehicles (ROV) to compete in underwater ROV competitions for several years. In the past, they have created custom motherboards that our 18v15 Simple Motor Controllers could plug directly into:
 |
Custom Simple Motor Controller motherboard for MSOE underwater ROV. |
|---|
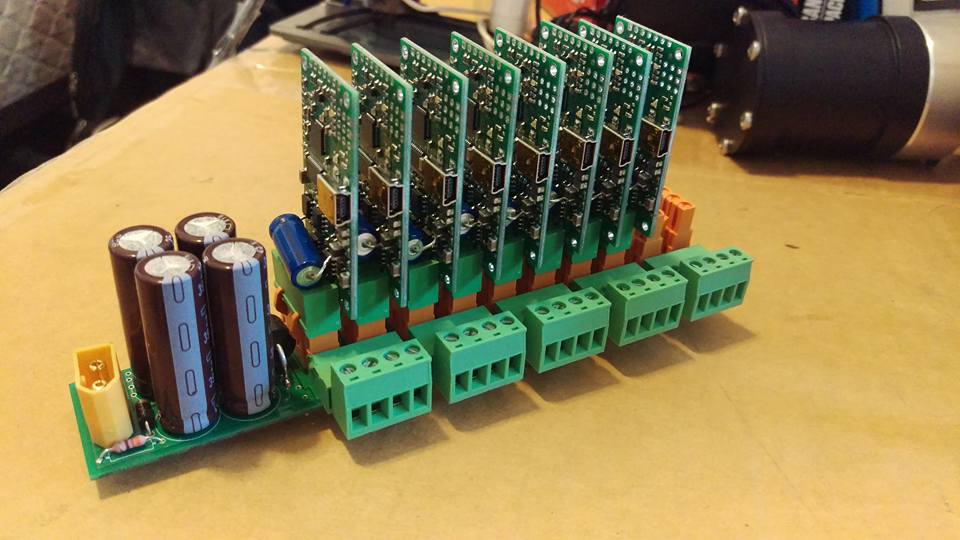
The team is now using our newer G2 High-Power Motor Driver 18v17, which allowed them to save space in the newest iteration of their motherboard.
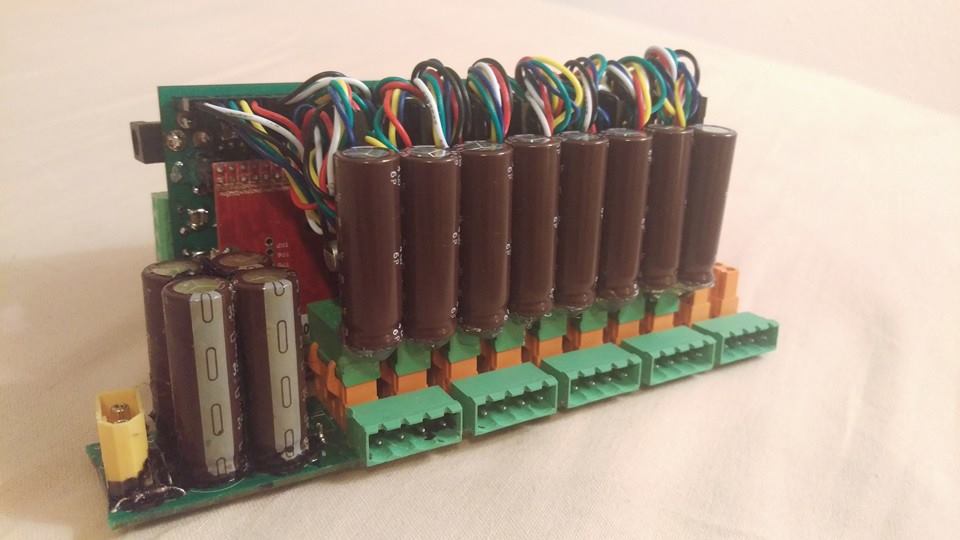 |
Custom G2 High-Power Motor Driver motherboard for MSOE underwater ROV. |
|---|
For more information and updates, check out the group’s Facebook page.
Related products


3D-printed mecanum wheel rover
One of our forum members, gchristopher, posted about his 3D-printed mecanum wheel rover. The rover uses our D24V10F5 5V regulator and some of our TB6612FNG dual motor drivers.
You can find more information on his blog. Additionally, you can find the CAD files on the Thingiverse page, and his original forum post on our forum.
Related products


Grant's mini sumo robot: Rattata

Remember my super cool sumo robot? My sumo robot is different from regular sumo robots. It’s like my sumo robot is in the top percentage of mini sumo robots. Continued…
Bohlebots at the German Open in RoboCup Soccer 1v1
 |
In March, I wrote a blog post about the Bohlebots robotics team winning the West German Robocup Soccer 1v1. Since then, the Bohlebots team has gone on to win first and third in the German Open Robocup Soccer 1v1 with their two robotics teams.
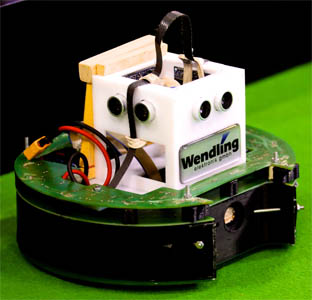 |
Bohlebots’ soccer robot. |
|---|
Good job Bohlebots!
Grant's line following robot: Pinto

My entry for the LVBots line following competition last month was a rehash of my line following robot from last year, Pinto. Unfortunately, my robot from last year robot never made it to the competition: while trying to get it to work last minute, it literally vibrated itself apart. I did not execute my ideas very well, but I still think my overall plan was not a bad one. Since I still had all the parts, I decided I wanted to revive the robot and try to follow through with my plan. Continued…


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation










