Pololu Blog » User Profile: Paul » Posts by Paul »
Posts by Paul (Page 5)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New version of the Zumo Shield for Arduino - now with full IMU!
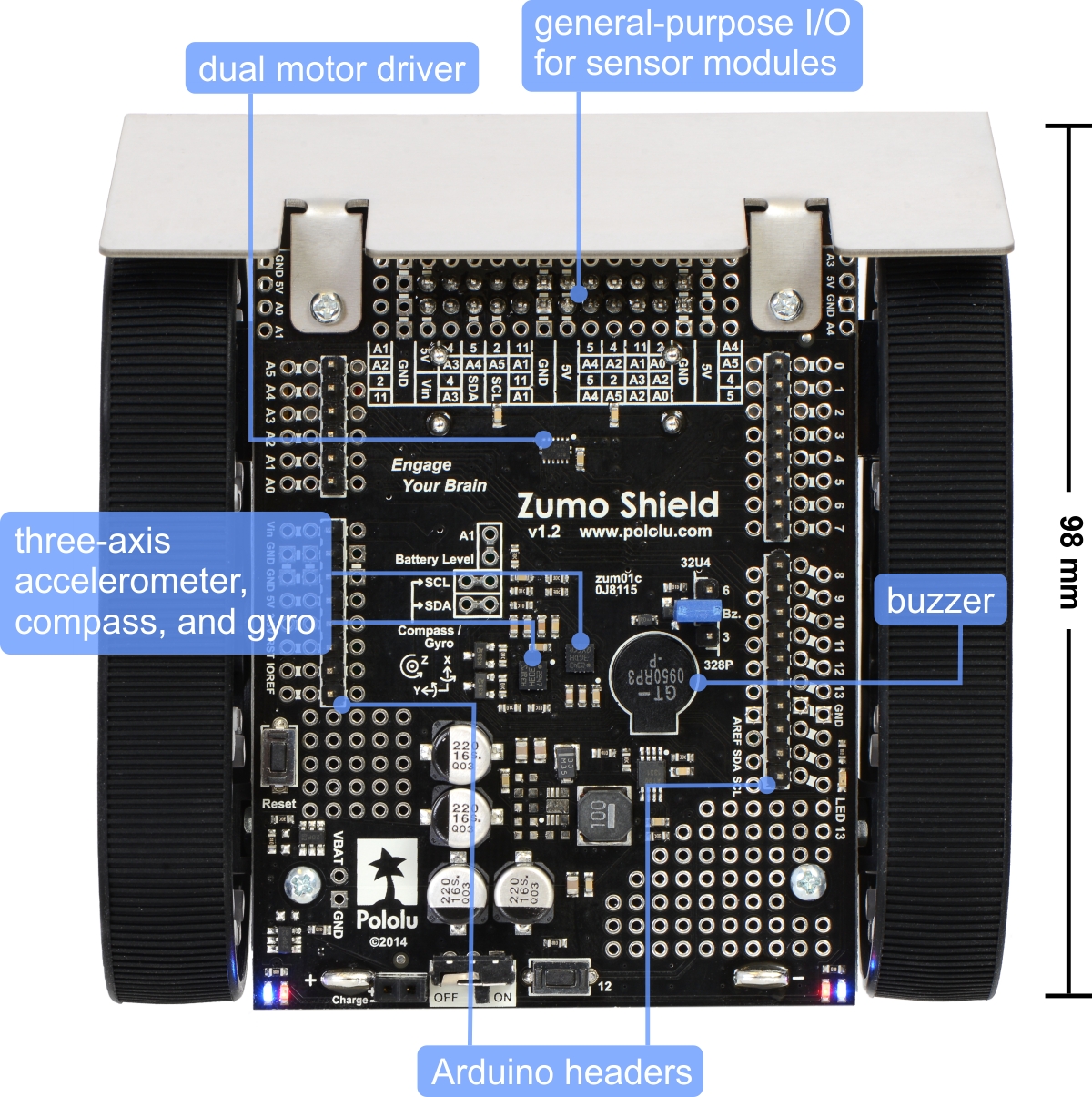 |
We posted recently about how progress in MEMS sensors has resulted in a constant stream of improved Pololu breakout boards. This week, we brought some of that technological progress to our Zumo robot with the release of a new “v1.2” version of the Zumo Shield for Arduino. This new version upgrades the previously-included LSM303DLHC compass to nine channels of inertial sensing using the newer LSM303D compass and L3GD20H gyroscope.
That means that the new Zumo shield includes a full inertial measurement unit (IMU) – the equivalent of a MinIMU-9 v3 – letting you turn it into a complete AHRS by adding an Arduino or compatible controller.
The v1.2 update extends to three new products:
- Zumo Shield for Arduino, v1.2
- Zumo Robot Kit for Arduino, v1.2 (No Motors)
- Zumo Robot for Arduino, v1.2 (Assembled with 75:1 HP Motors)
Other parts, such as the Zumo chassis, sumo blade, and reflectance sensor array, are not affected by this update, and the new Zumo shield is mechanically and electrically compatible with the previous model. They are also completely code-compatible except for the MEMS sensor aspects, which are already supported by our open-source Arduino libraries.
Related products



Closed Friday, July 4
 |
We will be closed on Friday, July 4 for Independence Day. Orders placed after 2 PM Pacific Time on Thursday, July 3 will be shipped on Monday, July 7.
 |
Math on the Pololu website!
Tomorrow is Tau Day! To celebrate, I thought I should write something about how we use math on our website.
Mathematics is essential to engineering, so we often need to use math when presenting a product or discussing some point about robotics and electronics. In the past, we have struggled to come up with our own ways of getting math online, such as using HTML code (e.g. a 1×2 table with an internal border can look like a fraction) or finding some engineer here who knows how to type up equations in LaTeX and export images.
Over the past month, we have quietly switched to MathJax, which is the technology used on the very popular site MathOverflow. We are using MathJax, for example, to explain current and voltage settings for our new TPS2113A carrier and to show how to compute the exact gear ratios of some of our Micro Metal Gearmotors – the 1000:1 Micro Metal Gearmotor being a particularly good example since it has so many gears.
MathJax allows us to type math directly into web pages using simple text codes, and it uses modern features of your web browser to format the math for you as the page is loaded. If you reload this page and watch the equation below carefully, you will briefly see the raw code before MathJax redraws it:
``int_0^oo e^(-x^2) dx = sqrt pi / 2``
(The integral of a Gaussian has long been one of my favorite mathematical exercises.)
Try it yourself
Instead of using the LaTeX syntax used on MathOverflow, we chose a simpler input format called ASCIIMath. You can read documentation on the ASCIIMathML page. The way it works is that you type ASCIIMath code within double back-quotes, like this:
``int_0^oo e^(-x^2) dx = sqrt pi / 2``
We have enabled MathJax throughout the site, including blog comments, so that you can participate fully in discussions here, starting with this little Tau Day celebration. So, what is your favorite equation? Try out MathJax and share it with us in the comment section below!
New distributors in Spain and Slovakia
Our distributor list continues to grow, with two new Pololu distributors in Europe:
 |
Complubot is an educational robotics organization in Madrid, Spain, that you might have heard of through their work on the Arduino Robot. In May, Complubot opened a robotics store, and they are carrying everything from LEGO Mindstorms kits to our 3pi and Zumo. We are also happy to see that they continue to host educational robotics workshops and post lots of updates and pictures on their Twitter feed.
 |
RLX Components is a distributor of electronic components, development tools, test equipment, and software in Bratislava, Slovakia. Founded in 1994, they carry products from numerous brands familiar to the maker community, and we are proud to see our products (such as the 3pi Robot) listed there, now, too.
See our list of almost 200 distributors to find one in your area.
Closed Monday, May 26
 |
We will be closed on Monday, May 26 in observance of Memorial Day. Orders placed after 2 PM Pacific Time on Friday, May 23 will be shipped on Tuesday, May 27.
New distributors in Singapore and Colorado
We are happy to announce two new Pololu distributors:
 |
Sun Light Electronics Pte Ltd is an electronics supplier in Singapore that was founded in 1992. They specialize in “ICs and transistors”, but as you can see from their website, they now carry far more than that, including a large selection of hobby, robotics, and prototyping products.
 |
Virtuabotix, in Colorado Springs, CO, is an electronics hardware manufacturer and distributor. They specialize in open-source hardware and have their own family of Arduino-compatible boards called Versalino. Virtuabotix also sells products through storefronts at Amazon, Newegg, and eBay.
See our growing list of almost 200 distributors to find one in your area.
New distributor: TinySine (Hefei, Anhui, China)
 |
We now have a second distributor in China: TinySine, an electronics manufacturer and retailer located in Hefei, Anhui province. They are initially carrying several of our products including the Maestro, Wixel, and A-Star.
TinySine, also known as Tinyos Electronics, ships worldwide with several express services as well as the low-cost Hongkong Post, so they are worth considering for your next project, wherever you are located. Please let them know if there is a Pololu part that you would like to see in their shop!
We announced our only other Chinese distributor, ALSRobotBase, just two months ago. See our growing list of almost 200 distributors to find one in your area.
New product: Logic Level Shifter, 4-Channel, Bidirectional
 |
Level shifting is a common issue when interfacing multiple microcontrollers or other digital logic devices. For example, you cannot directly connect an Arduino running at 5 V to the Wixel, which runs at 3.3 V. Our Wixel Shield for Arduino contains several level-shifting circuits to help you do this.
In some cases, such as connecting a digital sensor output to your microcontroller, a simple voltage divider or transistor inverter might be good enough. However, in many cases a better solution is necessary. I²C, for example, is a common protocol that makes use of a bidirectional communication line. Luckily, a relatively simple circuit consisting of a MOSFET and two pull-up resistors can be used for general-purpose bidirectional level shifting:
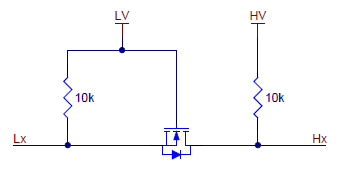 |
Schematic of a single bidirectional logical level shifter. |
|---|
We have used this level shifter circuit on many of our breakout boards operating at a lower voltage, such as the MinIMU-9. It works like this:
- When Lx, the lower-voltage input, is driven low, the MOSFET turns on and the zero passes through to Hx.
- When Hx, the higher-voltage input, is driven low, Lx is also driven low through the MOSFET’s body diode, at which point the MOSFET turns on.
- In all other cases, both Lx and Hx are pulled high to their respective logic supply voltages.
The circuit works for any pair of voltages (within the limitations of the MOSFET) and can be used with most common bidirectional and unidirectional digital interfaces, including I²C, SPI, and asynchronous TTL serial. You can read more about it in NXP’s application note on I²C bus level-shifting techniques (54k pdf).
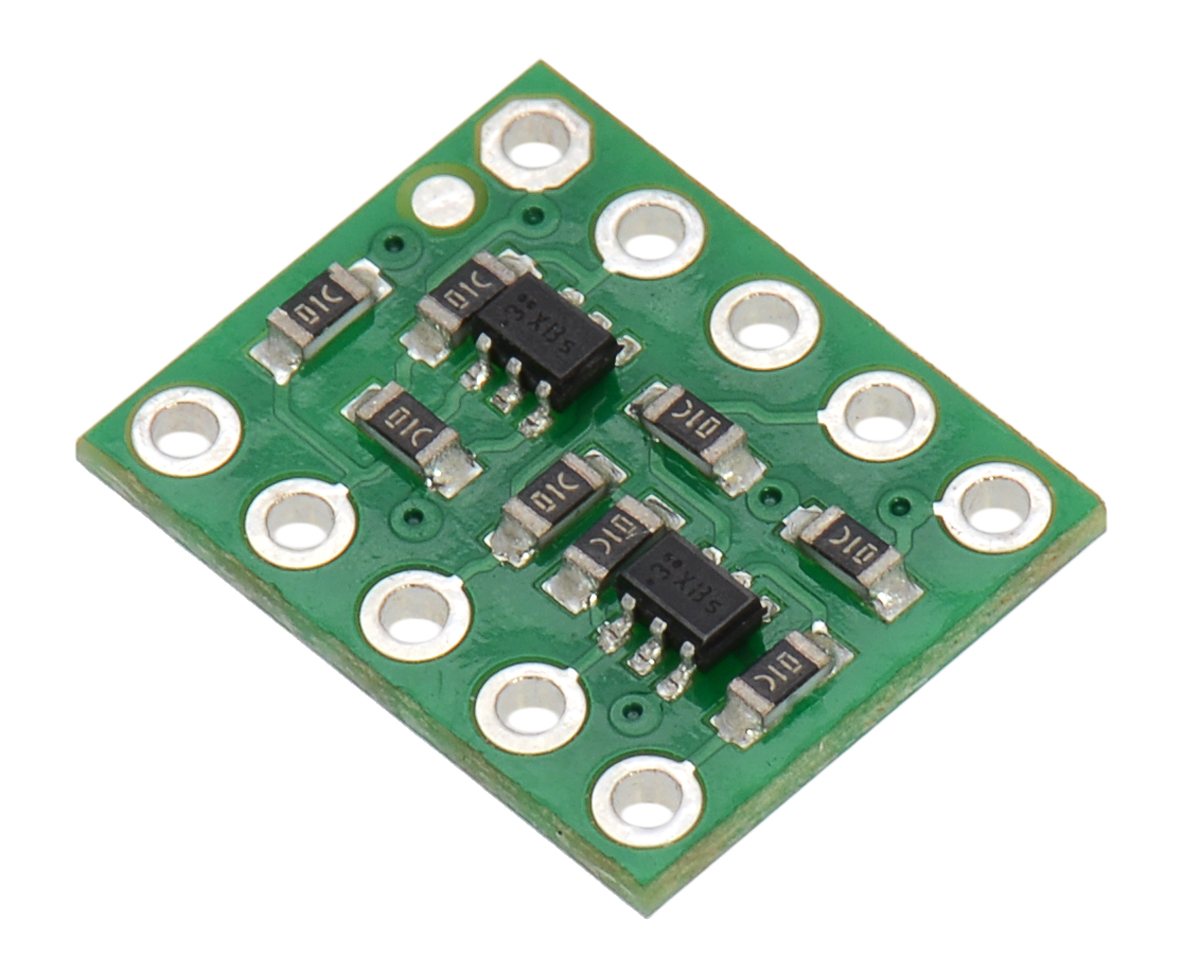
Today we released a logic level shifter board featuring four of these bidirectional channels:
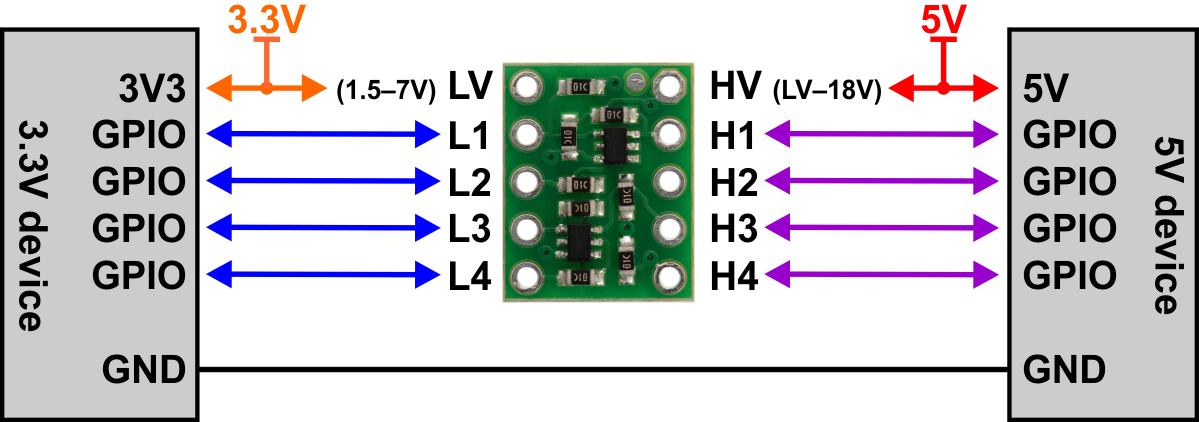 |
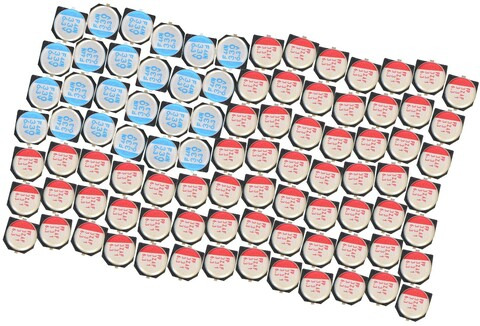
Our board can convert signals as low as 1.5 V to as high as 18 V and vice versa, so you can use it for almost any logic-level signals that you might encounter in your project. It is also, as far as we know, the smallest bidirectional logic level conversion board out there:
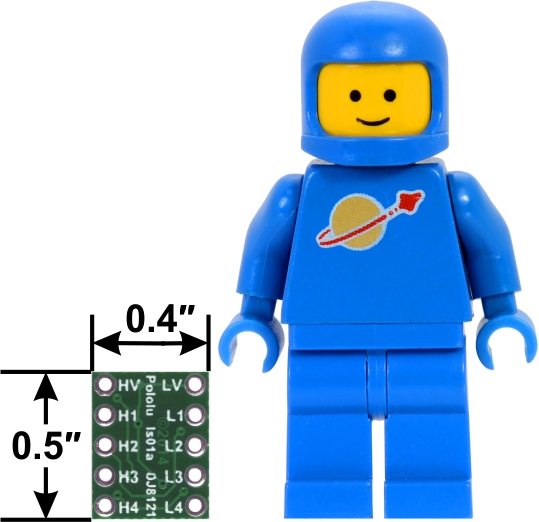 |
Note the use of a more internationally-appropriate size reference than our traditional U.S. quarter. After we put together this image, nobody believed that the board was actually that small, but we verified it several different ways to make sure.
Anyway, with this board’s small size, low cost, and versatility, we think it is something that everyone should have in their toolbox. For more information or to order, see the product page.
Related products

New distributor: GarageLab (Doral, FL)
 |
We are happy to welcome GarageLab as a Pololu distributor! GarageLab, located in Doral, FL, is the US branch of our Brazilian distributor Laboratório de Garagem. They carry a wide range of Arduino, microcontroller, and robotics-related products, including their very own Arduino-compatible Garagino.
For distributors in your area, you can check out our complete list of almost 200 distributors.
Get a free A-Star 32U4 Micro with orders over $100!
 |
We recently released the A-Star 32U4 Micro, an Arduino-compatible ATmega32U4 breakout board intended to be cheap enough to go into (and stay in) almost any project. To help our customers put A-Stars in everything, we are announcing a new, limited-time offer: on any order over $100, you can get a free A-Star 32U4 Micro with coupon code FREEASTAR.
Taking advantage of this deal? What are you planning to use your A-Star for? Please tell us about your project in the comment section.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










