Pololu Blog »
Dead reckoning and wall following with a Zumo
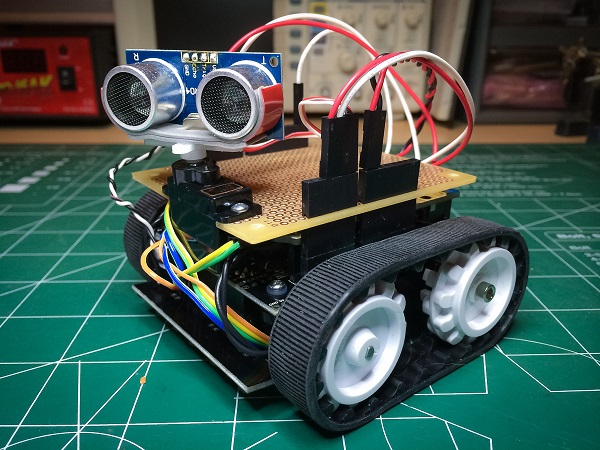 |
Forum user solderspot recently posted on our forum about some modifications he’s been making to his Zumo robot. First, he added our optical encoders for micro metal gearmotors to his robot, which required using motors with extended back shafts and cutting holes in the chassis to route the wires from the encoders.
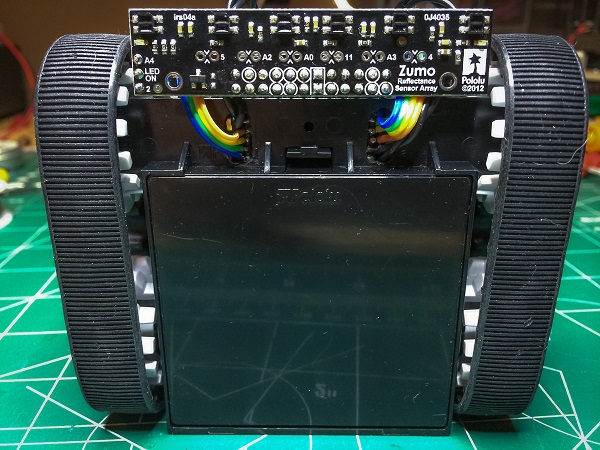 |
This allows his Zumo to navigate by dead reckoning, using just the information from the encoders.
He also mounted a sonar sensor on a servo to his robot, which enables it to find its way around a room by following the walls.
A series of articles on solderspot’s blog, starting with this one, covers his experience building and programming his robot. It looks like solderspot has further plans for the Zumo, including more sophisticated autonomous navigation, so watch his blog if you want to keep up with the latest developments.
Related products



-

New product: L3GD20H 3-Axis Gyro Carrier
- 7 February 2014We have new gyros fresh out of the oven. No, I’m not talking about a Greek dish. I’m talking about our new L3GD20H 3-axis gyro carrier. One of the...
-

Free Elektor magazine March 2014
- 12 March 2014Get a FREE copy of Elektor magazine’s March issue with your order while supplies last. To get your free issue, enter the coupon code ELEKTOR0314...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
