Pololu Blog » Engage Your Brain »
Servo, servo motor, servomotor (definitely not server)
Now that the cat’s out of the bag about RC hobby servos having motors inside (it was a very transparent bag), it’s appropriate to emphasize that servos are not “servo motors” and that “servo” is not short for “servomotor”. Servo is short for “servomechanism”, whereas servo motors are motors intended to be used in servos. It’s important to understand the distinction because we should care about names and communicating well; making the distinction between the terms will also help emphasize why hobby servos are so special.
First off, “servo” by itself is a general term for a system that uses feedback to achieve or maintain some parameter. In this general sense, a servo need not include a motor or even any moving parts at all: the canonical example of a non-motorized servo is a temperature control system, where power is automatically applied to maintain a desired temperature or to generate some kind of temperature profile over time. Even in a mechanical servo, the movement could come from an actuator that is not a motor, such as a pneumatic or hydraulic piston. The key feature is the automatic control based on evaluation of the result, so all kinds of mechanisms can be made into servos by adding that feedback-based control. The term “closed loop” is used for these feedback-based systems, as opposed to “open loop” for systems that do not monitor and respond to the output. The control does not have to be electronic, but it usually is, especially if we’re talking about a robotics context.
Although servos do not necessarily include electric motors, motors are such good and common actuators that they are used in many servos. We can use just about any motor in a servo, thereby making it a servo motor, but the term servomotor usually implies a motor that is designed specifically for use in servo systems. Motors optimized for servo applications can have integrated sensors to be used with the closed-loop controller, or they might be designed for high acceleration. A typical fan motor is not a servo motor since we just give it some power and let it blow at whatever speed that power happens to correspond to; a motor moving the print heads back and forth in an ink-jet printer is a servo motor since it needs to repeatedly and quickly switch directions while maintaining position control to make sure the ink gets deposited in the desired locations.
An RC hobby servo is much more than just the motor; here is the picture from the previous post that shows the basic components:
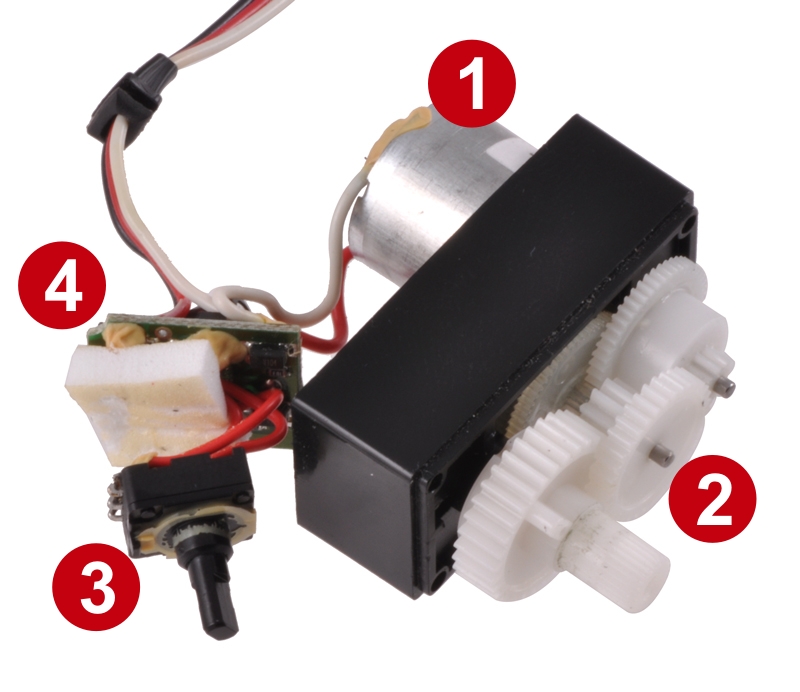 |
Identification of the major components of a disassembled servo. |
|---|
- Motor
- Gearbox
- Position sensor
- Motor control electronics
If we draw a block diagram of how these components are logically connected, we can see the loop from control electronics to motor to gearbox to sensor and back to control electronics that makes this a closed-loop system and therefore a complete servo:
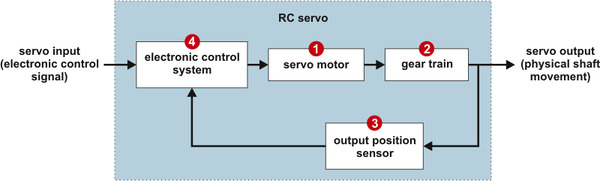 |
A servo motor might have integrated sensors or modular gearboxes that are effectively integrated, but the significance of the RC servo is that it includes the control system: it’s a whole servo, not just part of one.
Getting back to the basic terminology, we usually just call these objects servos, and we might initially say “RC servo” or “hobby servo” to make sure everyone understands that we’re in the general domain of servos developed for the radio control hobby industry. Within this context, these devices are always called servos, not servo motors. You should not just take my word for it: at a major hobby store like Tower Hobbies, a search for servo motor yields three results, none of them the hundreds or thousands of servos shown when the search is just for “servo”. At Hobby Lobby, a search for “servo” yields over 500 items; a search for “servo motor” returns fewer than 200, and even those show up only because the motor in the servo is discussed in the product description. A similar search at Hobby People, a site that has physical stores in Las Vegas and southern California, shows 24 results, almost all replacement motors for servos:
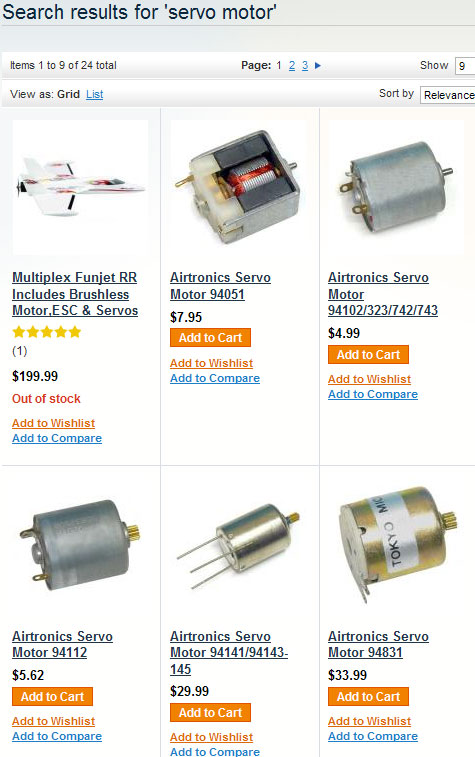 |
Hobby People search results for “servo motor”. |
|---|
Similarly, name-brand servo manufacturers like Futaba, Hitec, JR, and Airtronics all refer to their products exclusively as “servos”. RC servos tend to be called “servo motors” only by relatively small organizations or in projects or tutorials made by people that perhaps do not actually know servos that well (or who want the term “motor” to also appear on their web pages for search engine optimization purposes).
Switching into armchair psychiatry mode, I suspect that some of the reason people insist on adding “motor” is that “servo” is a foreign word that by itself does not convey to them the notion of a general actuator to the same extent as the more familiar “motor”. Unfortunately, as I hope I’ve demonstrated by now, saying “servo motor” only serves to confuse since the people who say it usually mean “servo” and not the motor by itself. For those who object that servo by itself might be more general than desired, we can say RC servo or hobby servo. Plus, if you talk about the servo in your robot arm’s elbow, no one will get confused and think you’re talking about some kind of a heating system. Thus, when we use the term servo, it’s akin to calling our cars “vehicles”: it might be a bit under-specific, but it beats being misleadingly over-specific and calling your car a motorcycle.
 |
Lego servo motor. |
|---|
One final note is that it sometimes can be difficult to tell if something is a servo or a servo motor. Lego sells a servo motor for its robotics construction set that on the surface might look like a servo: you plug multiple units into a main control box, which can tell the motors where to go. The distinction is that Lego’s motor is really just a motor with built-in sensors designed for use in closed-loop systems. However, unlike hobby servos, there is no controller inside the Lego servo motor: the closed-loop control is implemented elsewhere, in the main controller brick, which looks at the feedback from the servo motor and decides how much power to give it.
Next up: Electrical characteristics of servos and introduction to the servo control interface.
-

Why we don't have comments on our product pages
- 25 January 2011A customer recently wrote: “I think you really need to add comments from users under each product (like sparkfun does). Makes it easy to review...
-

Snow-Boarduino 4WD robot
- 1 February 2011We found this robot pictured on the Adafruit forums driving through some snow. It was made with a TReX, a 4WD Wild Thumper, and a Boarduino.
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation








