UM6 r2 Ultra-Miniature Orientation Sensor

The UM6 r2 ultra-miniature orientation sensor from CH Robotics uses rate gyros, accelerometers, magnetic sensors, and an onboard 32-bit ARM Cortex processor to compute sensor orientation 500 times per second. Sensor orientation is reported using either quaternions or Euler angles over a TTL serial interface at user-customizable rates. The UM6 was designed specifically to be easy to use—an external enclosure protects sensitive electronics, and connectors make it easy to interface with the sensor without making solder connections to the sensor itself.
| Description | Specs (9) | Pictures (7) | Resources (8) | FAQs (0) | On the blog (1) | Distributors (0) |
|---|
Note: CH Robotics has discontinued the UM6 r2 and replaced it with the newer and higher-performance UM7 orientation sensor.
 |
 |
Overview
The UM6 r2 ultra-miniature orientation sensor—also known as an Attitude and Heading Reference System, or AHRS—from CH Robotics is much more than an IMU. It uses rate gyros, accelerometers, magnetic sensors, and an onboard 32-bit ARM Cortex processor to estimate the absolute sensor orientation 500 times per second. Sensor orientation is reported using either quaternions or Euler angles over a TTL serial interface at user-customizable rates. A USB-to-serial adapter can be used to connect the IMU to a computer running the free CH Robotics Serial Interface PC application, which allows for easy data visualization, board calibration, and UM6 settings configuration.
The UM6 was designed specifically to be simple to use: an external enclosure protects sensitive electronics, its small size (1.1″ × 1.4″ × 0.5″) makes it easier to fit into the end system, and connectors mean no soldering to the sensor itself is required. A polarized four-pin male connector on the side of the UM6 matches an included 7.5″ cable and provides the lines necessary to power the board and use the main TTL serial interface. Two 12-pin female connectors on the underside of the UM6 provide access to these same pins along with additional, unused Cortex pins and allow the sensor to be plugged directly into a host system, removing the need to run wires to enable the sensor to communicate.
The UM6 can be configured to automatically transmit raw sensor data, processed sensor data, and angle estimates at user configurable rates ranging from 20 Hz to 300 Hz in roughly 1 Hz increments. Alternatively, the UM6 can operate in “silent mode,” where data is transmitted only when specific requests are received over the UART. Regardless of the transmission mode and rate, internal angle estimates are updated at 500 Hz to improve accuracy.
The UM6 simplifies integration by providing a number of automatic calibration routines, including rate gyro bias calibration, magnetometer hard and soft iron calibration, and accelerometer “zeroing” to compensate for sensor-platform misalignment. All calibration routines are triggered by sending simple commands over the serial interface.
The UM6 comes factory-calibrated to remove soft and hard iron distortions present in the enclosure. When integrated into the end-user system, additional calibration may be necessary to correct other magnetic field distortions. Magnetometer calibration can be performed using the CH Robotics Serial Interface software.
The UM6 r2 has the ability to interface with an external GPS module to provide position, altitude, speed, and course outputs. Any GPS module that communicates using industry-standard NMEA sentences, such as our LS20031 GPS receiver module, can be used with the UM6.
The CHR-UM6r2 is a drop-in replacement for the original CHR-UM6. The UM6 r2 uses a different firmware version to support some internal hardware changes, but it is functionally identical to the original.
Product Comparison
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Gyros (3x) | Accels (3x) | Mag (3x) | Altitude | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 v6 |  |
|
|
||||||
| Pololu AltIMU-10 v6 | |
|
|
|
|||||
| Redshift Labs UM7-LT Orientation Sensor | |
|
|
|
|
|
|
||
| Redshift Labs UM7 Orientation Sensor | |
|
|
|
|
|
|
|
|
Features
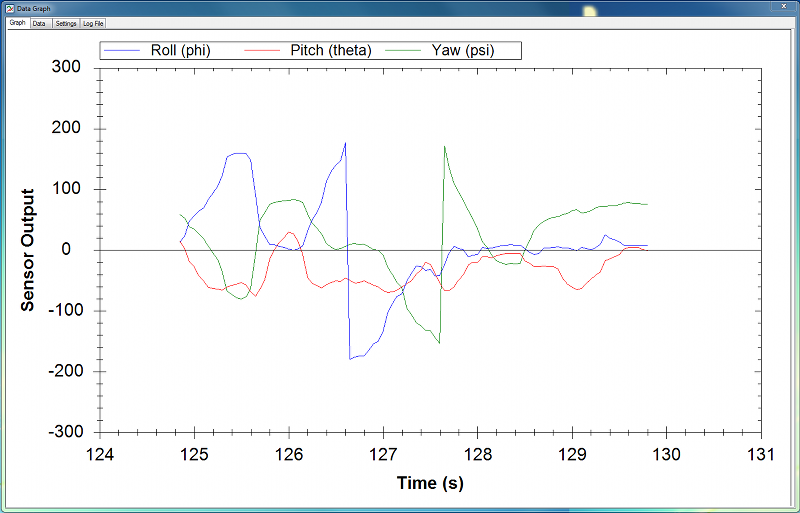 |
Graph of all three Euler angles displayed by the CH Robotics Serial Interface connected to a CHR-UM6 orientation sensor. |
|---|
- On-board EKF produces quaternion outputs and Euler angles (yaw, pitch, and roll) from 3 gyro axes, 3 accelerometer axes, and 3 magnetometer axes
- Automatic gyro bias calibration
- Data output rate adjustable from 20 to 300 Hz (data is internally sampled at 500 Hz regardless of the broadcast frequency)
- Supports connection to external GPS and parses GPS data to provide position, heading, and velocity outputs (firmware revision UM2B or newer only)
- TTL UART communication interface (3.3V with 5V-tolerant pins) with baud rates up to 115,200 bps can stream data or provide updates on request
- On-board 3.3V regulator simplifies integration
- 5V-tolerant I/O pins for easy integration with 5V systems
- Open-source Cortex firmware (in C) with free development tools
- Open-source PC software (Visual C++) for data visualization, calibration, and AHRS configuration
- Two UARTs, one I²C bus, and one SPI bus are brought out to the bottom female header pins for custom applications
- Plastic enclosure protects electronics and connectors make it easy to interface with it without making solder connections
- Included 4-conductor 7.5" cable
 |
Cable included with the CHR-UM6 orientation sensor. |
|---|
Specifications
- Better than 2° pitch and roll angle accuracy under static test conditions (actual performance will vary depending on calibration and environment; currently, the UM6 is not calibrated at the factory, and angle estimates can deviate as much as 5° from the actual angle on an uncalibrated unit)
- Better than 5° yaw angle accuracy
- 16-bit Euler angle outputs provide 0.01° resolution
- 3.5 – 5 V operating range, 3.3V logic level (5V tolerant)
- ±2000°/s maximum measurable rotation rates
- ±2 g accelerometer range
- Weight: 7 grams (0.3 oz)
- Size: 27.8 × 35.6 × 11.5 mm (1.1" × 1.4" × 0.5")
Application Examples
The CHR-UM6r2 can be used in applications where a compact attitude and heading reference system is needed:
- UAV navigation
- Robotics
- Motion tracking
- General motion sensing
- Platform stabilization
- Image stabilization
- Enhanced GPS navigation
Related products









Related categories



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
