Sensors » Encoders » Encoders for Micro Metal Gearmotors »
Optical Encoder Pair Kit for Micro Metal Gearmotors, 3.3V

Add quadrature encoders to your LP, MP, or HP micro metal gearmotors (extended back shaft version required) with this kit consisting of two sensor boards, two 3-tooth encoder wheels, and two 5-tooth encoder wheels. The installed system does not exceed the 12 mm × 10 mm cross section of the motors and extends only 5 mm beyond the plastic motor end cap. The 3-tooth wheel provides 12 counts per revolution; using the 5-tooth wheel yields 20 counts per revolution. This version is intended for use at 3.3 V.
Note: This version is not compatible with the HPCB micro metal gearmotors; it is only compatible with LP, MP, and HP dual-shaft micro metal gearmotors.
Alternatives available with variations in these parameter(s): voltage Select variant…
 Compare all products in Encoders for Micro Metal Gearmotors.
Compare all products in Encoders for Micro Metal Gearmotors.
| Description | Specs (4) | Pictures (13) | Resources (3) | FAQs (0) | On the blog (6) |
|---|
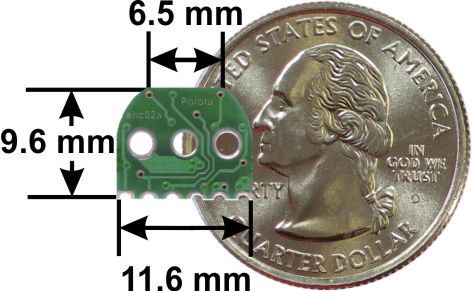 |
Reflective optical encoder for Micro Metal Gearmotors, bottom view with dimensions. |
|---|
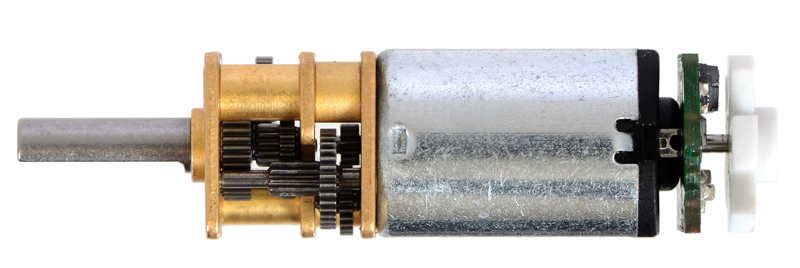 |
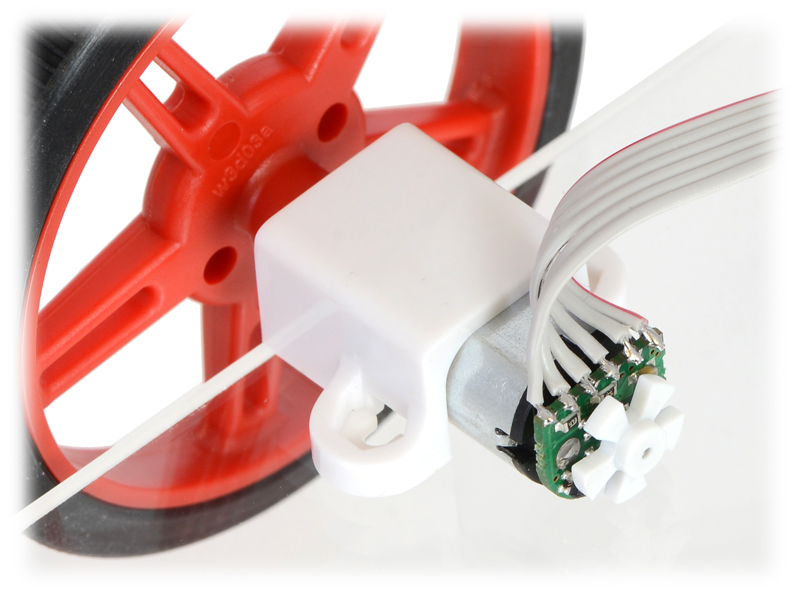
Installed Micro Metal Gearmotor reflective optical encoder with 5-tooth wheel, side view. |
|---|
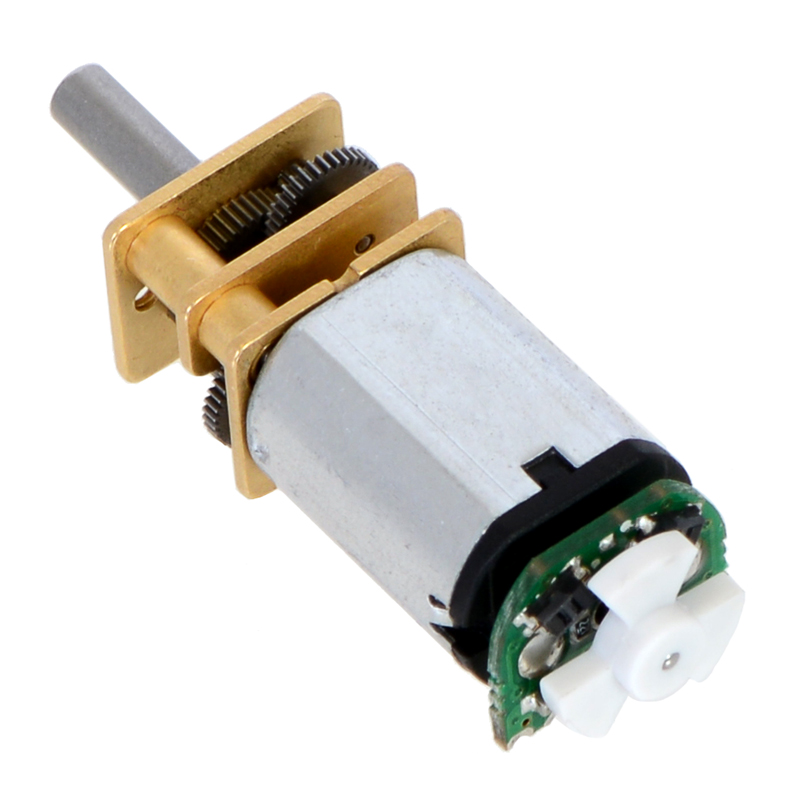 |
Installed Micro Metal Gearmotor reflective optical encoder with 5-tooth wheel. |
|---|
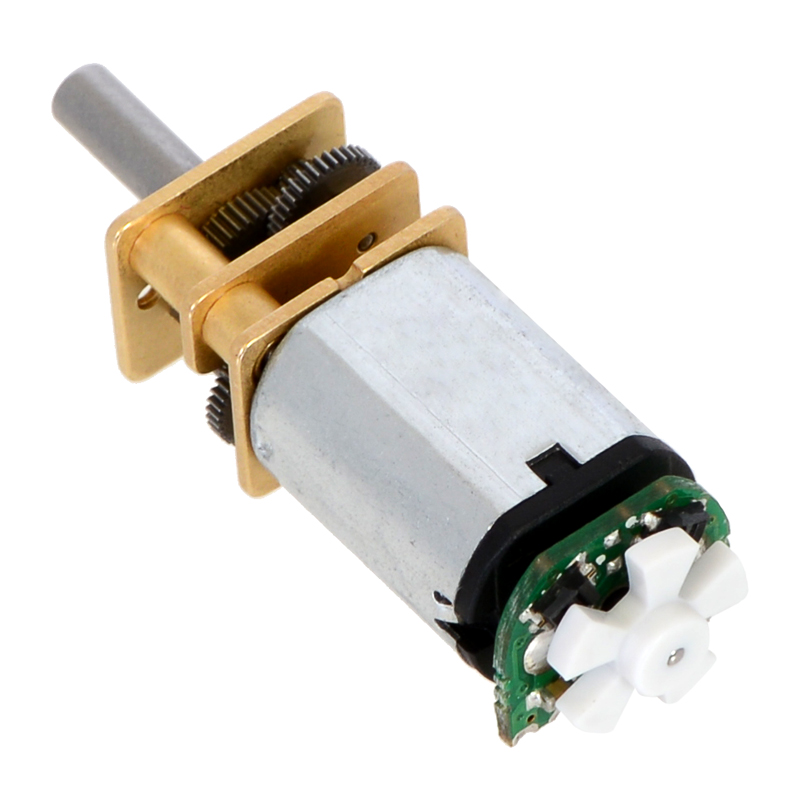 |
Installed Micro Metal Gearmotor reflective optical encoder with 5-tooth wheel. |
|---|
 |
Example of an installed Micro Metal Gearmotor reflective optical encoder. |
|---|
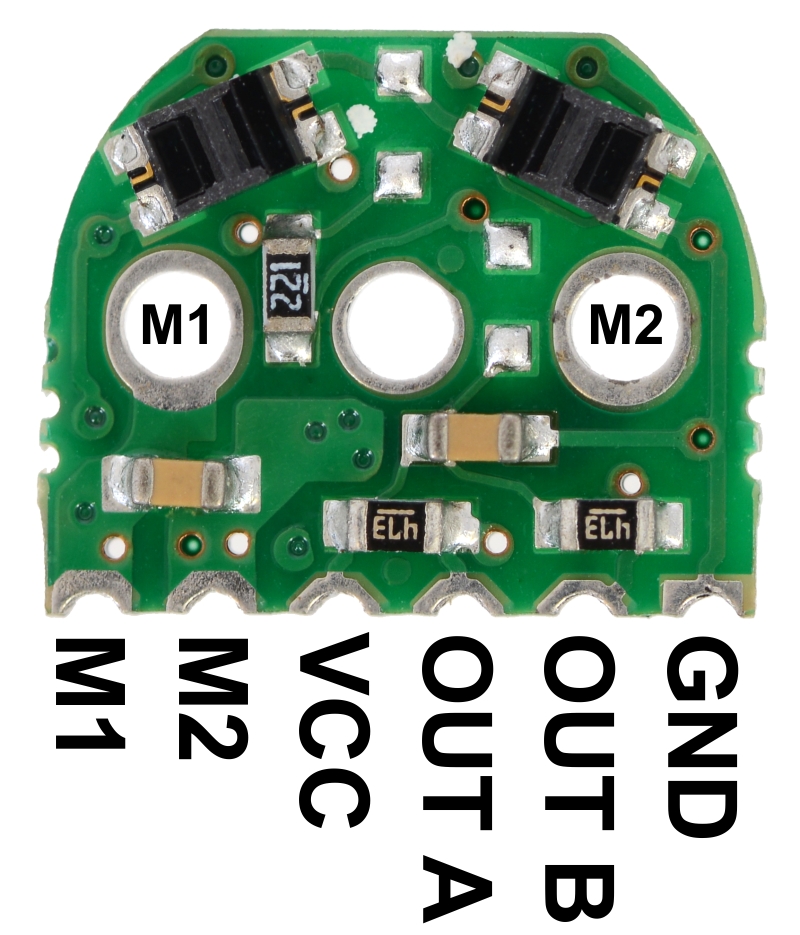 |
Micro Metal Gearmotor reflective optical encoder pinout. |
|---|
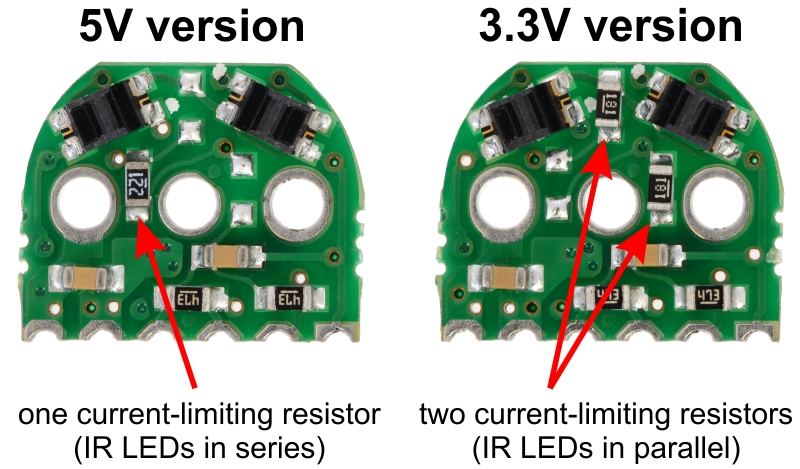 |
Comparison of 5V and 3.3V reflective optical encoders for Micro Metal Gearmotors. |
|---|
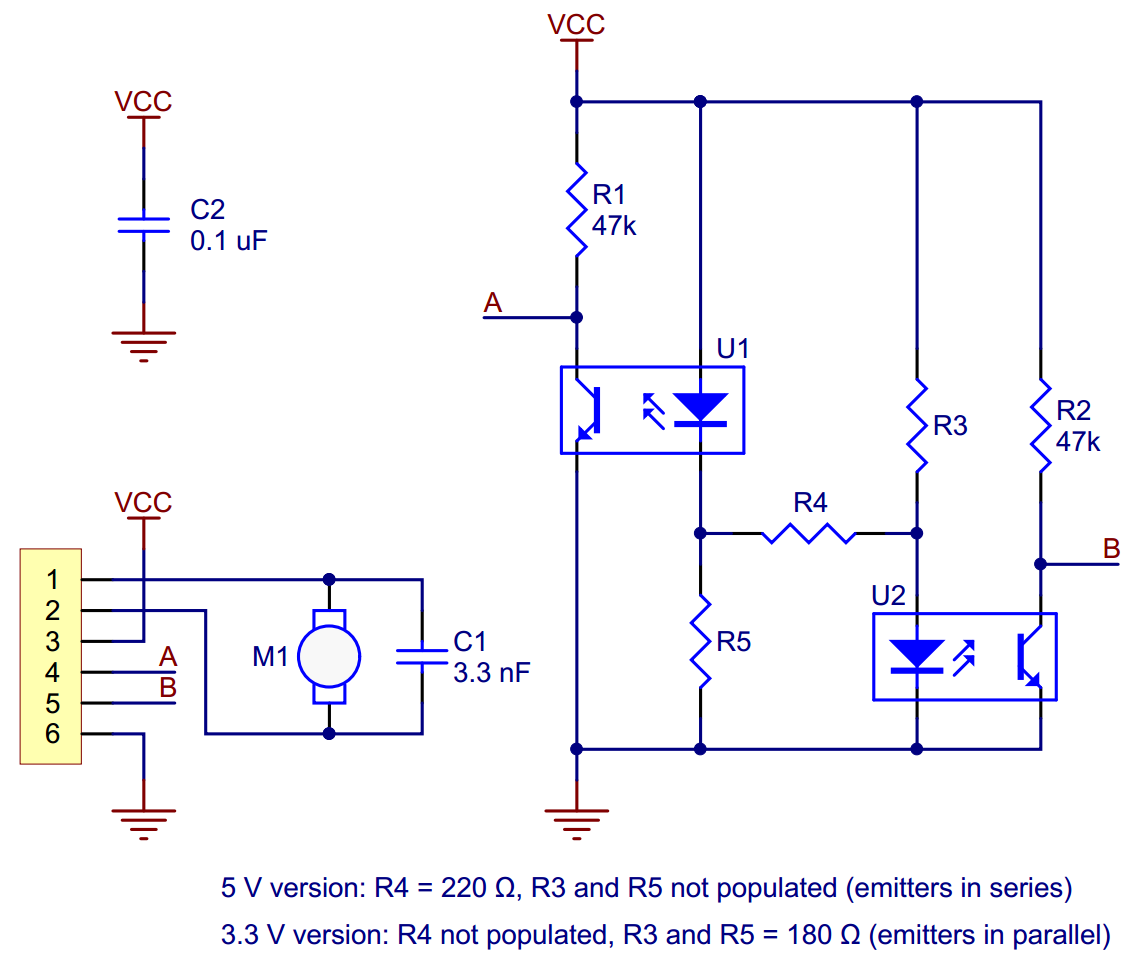 |
Schematic diagram for the Micro Metal Gearmotor reflective optical encoder. |
|---|
 |
5V encoder version, motor approx. 30k RPM: 5-tooth wheel way too far from sensors. |
|---|
 |
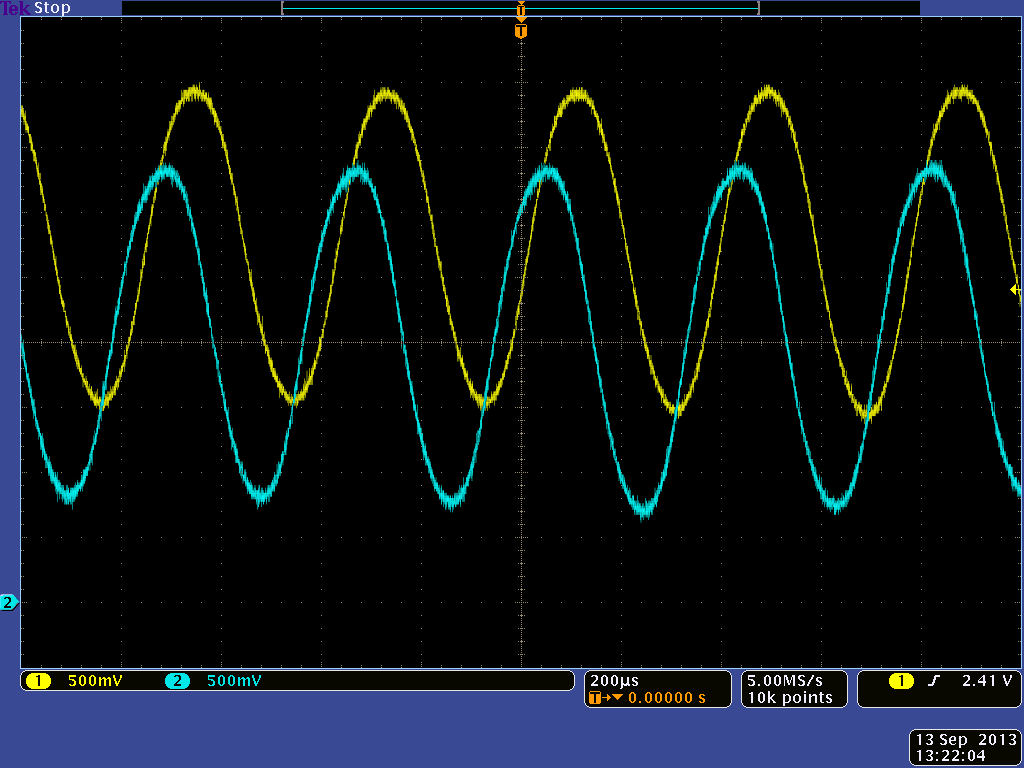
5V encoder version, motor approx. 30k RPM: 5-tooth wheel slightly too far from sensors. |
|---|
 |
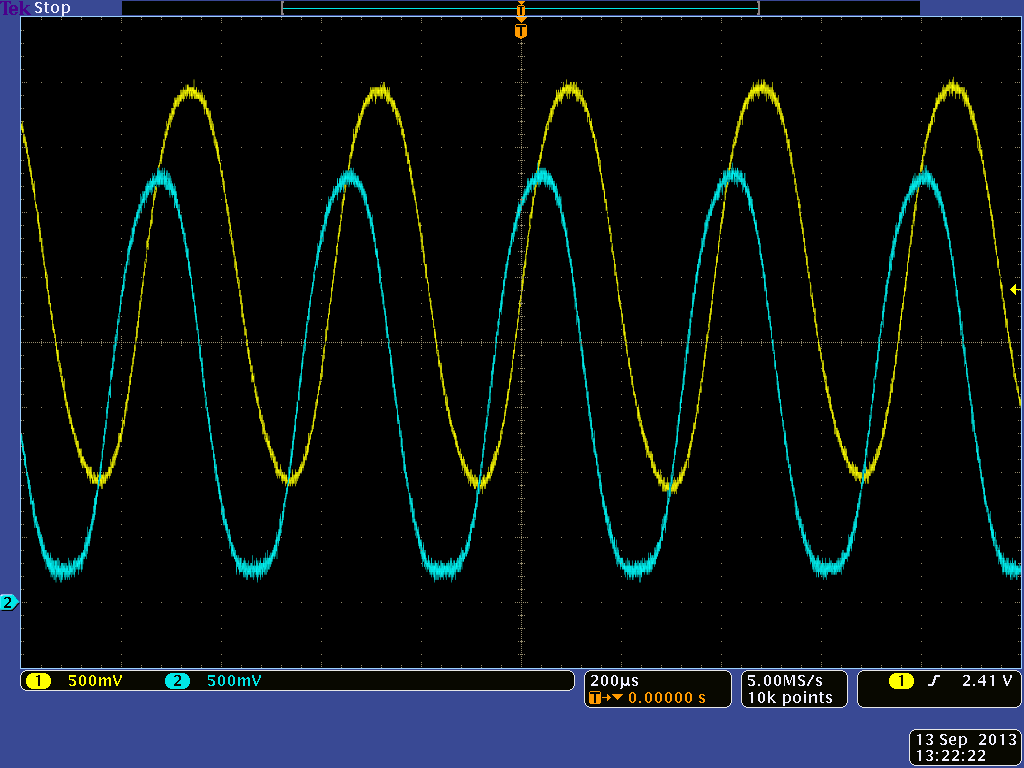
5V encoder version, motor approx. 30k RPM: 5-tooth wheel at optimal distance from sensors. |
|---|
 |
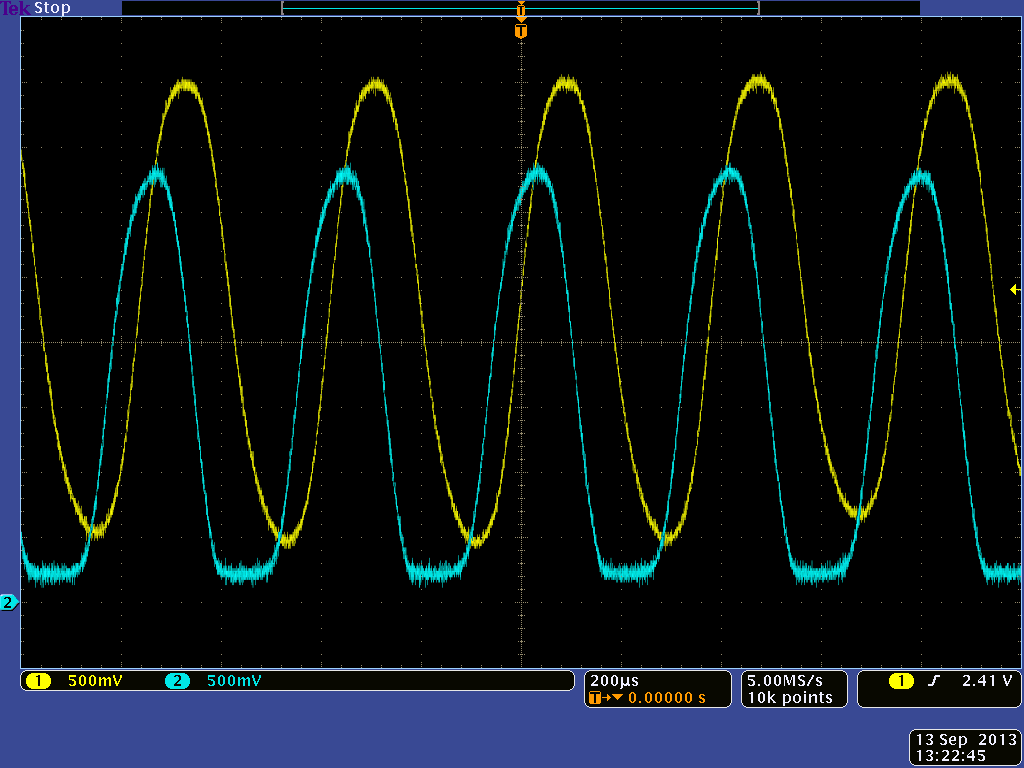
5V encoder version, motor approx. 30k RPM: 5-tooth wheel slightly too close to sensors. |
|---|
 |
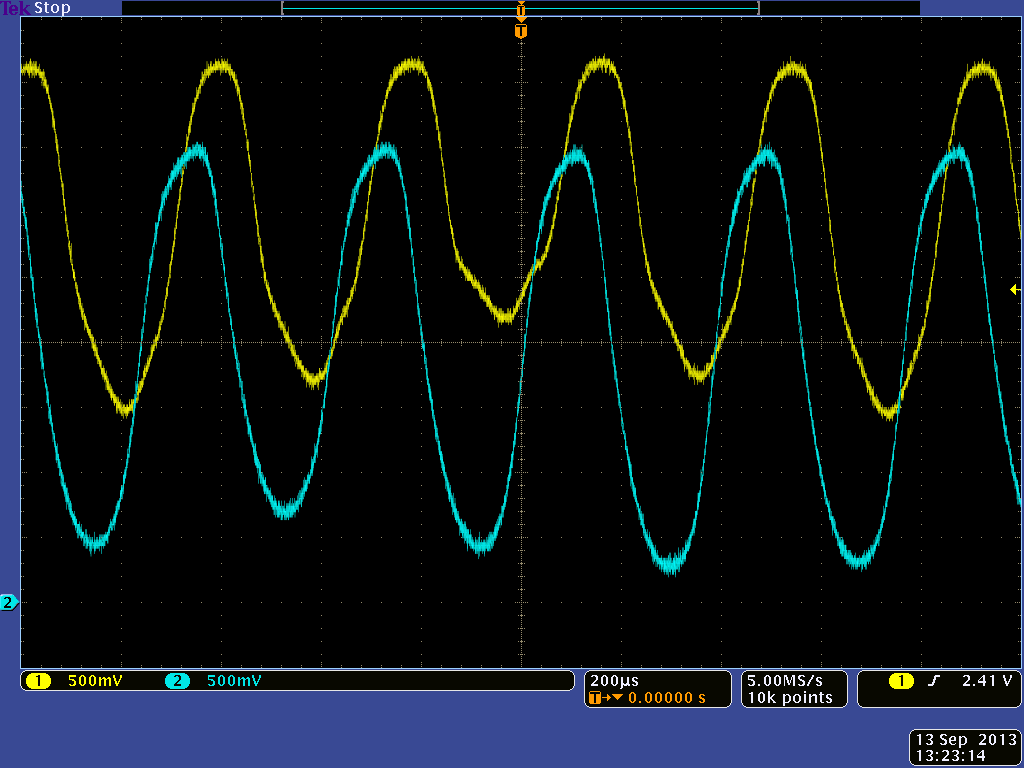
5V encoder version, motor approx. 30k RPM: 5-tooth wheel way too close to sensors. |
|---|
Related products








Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
