Tamiya Robocraft Series »
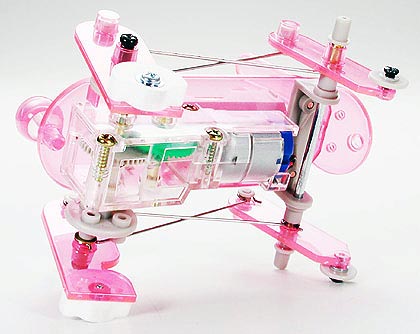
Tamiya 71108 Mechanical Rabbit - Hopping Type

This fast Mechanical Rabbit hops when motor rotation is transferred to the legs via crank plates and linkage rods.
 Compare all products in Tamiya Robocraft Series or Tamiya Robot Kits.
Compare all products in Tamiya Robocraft Series or Tamiya Robot Kits.
| Description | Specs (0) | Pictures (3) | Resources (0) | FAQs (0) | On the blog (0) | Distributors (0) |
|---|
How it works
Motor rotation is transferred to the legs via crank plates and linkage rods, causing the rear legs kick the robot forward in a hopping motion. As more of the weight is supported by the front legs, rollers attached to the feet eliminate the friction that would result from this extra load. The Mechanical Rabbit’s body is made from a transparent pink ABS resin that allows you to see all of the motors, gears, cranks, and linkage rods in action.
|
|

 |
Battery moved forward for effective movement.
The Mechanical Rabbit is powered by a single AAA (a.k.a. R03 or UM4) battery (sold separately) to keep its total weight low. The motor and battery case have been shifted to the front of the body to allow for smooth, unhindered rear leg movement.
Running the rabbit
The Mechanical Rabbit comes with guides that can be attached to both sides of the rabbit to make it compatible with Mini 4WD circuits. You can race your friends!
Basic specifications
- Total length: 115 mm
- Total weight: 95 g (without the battery)
- Body material: ABS resin
- Gearbox and motor included.
- Includes guides that can be attached on both sides to make the mechanical rabbit usable on Mini 4WD circuits.
- A screwdriver for the assembly is provided.
- Requires one AAA (a.k.a. R03 or UM4) battery (sold separately).
- Continuous running time with Alkaline battery: 40 min.
Note: This is a kit. Assembly requires using a screwdriver and snapping parts together. No soldering is required. Run on flat, smooth surfaces; avoid running over slopes, on bumpy roads, or on thick carpet.
Related categories




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
