Pololu Blog » User Profile: Jamee »
Posts by Jamee
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
ZumoMotors library for Netduino
|
|
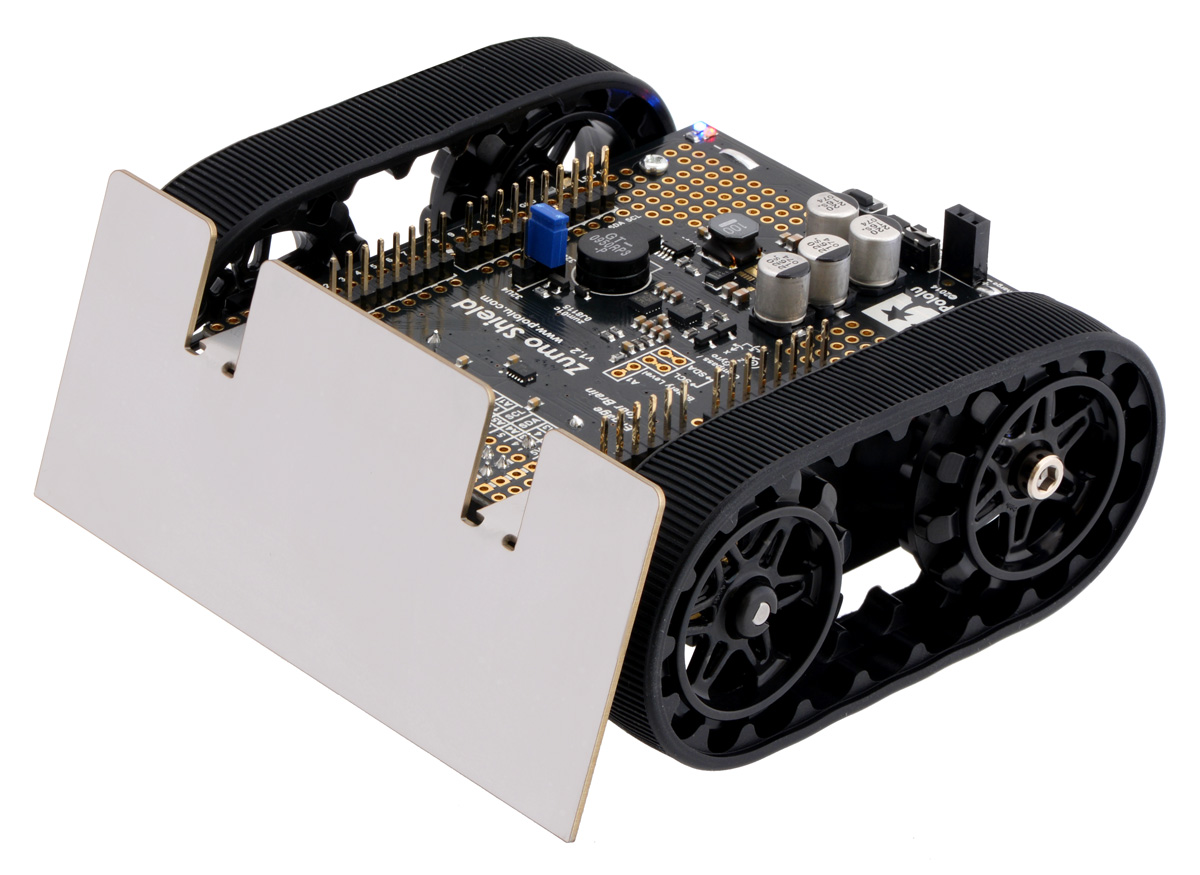
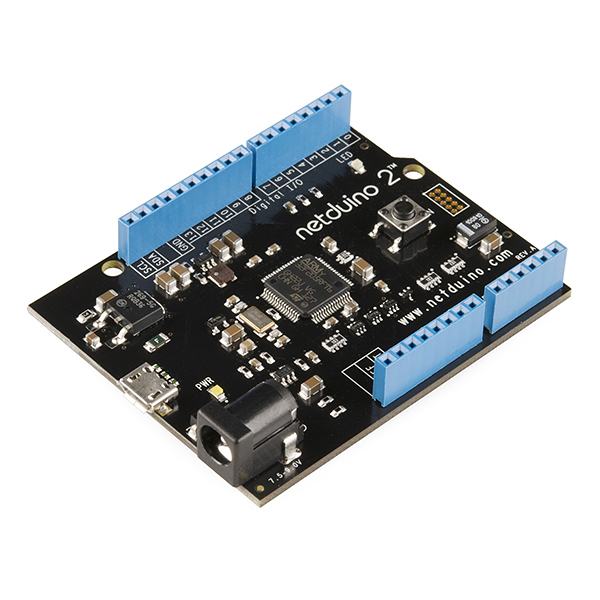
The Pololu Zumo Robot for Arduino is designed to be essentially a shield for the A-Star 32U4 Prime, Arduino Uno or Arduino Leonardo. Other Arduino boards that conform to the Arduino interface might work too. For example, customer Omar Elabd ported the ZumoMotors library to his Netduino 2! The Netduino is a 32-bit microcontroller board similar to Arduino that runs the .NET Micro Framework instead of using the Arduino environment.
He posted his code on GitHub and announced it on his blog. He is thinking of expanding his library to include ZumoBuzzer and ZumoReflectanceSensorArray libraries. The library is written in C#, which is exciting since I’m a C# programmer myself! If others would like to expand on these libraries, Omar is open to code contributions.
Related products

Jamee's dead reckoning robot
Several Pololu employees made robots for the LVBots dead reckoning competition. Unfortunately, my robot didn’t work enough in time for the competition, but perhaps the description of my robot might give you ideas for your own dead reckoning robot. Continued…
Remote-controlled Zumo Robot
 |
Forum user robo_proyect uses an IR sensor for RC control and an ultrasonic sensor for obstacle avoidance on his Zumo robot.
You can see more about robo_proyect’s robot in his forum post.
WALL-E controlled by a Maestro
Forum user robo_proyect modified a WALL-E toy with a Micro Maestro 6-Channel USB Servo Controller for his first robotics project. Visit his blog (in Spanish) for more information on this and his other projects.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7435
Zumo Robot with Pololu Plug-in Modules
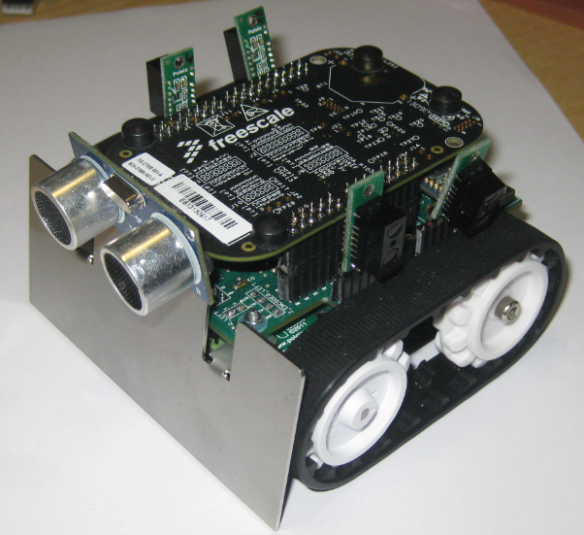 |
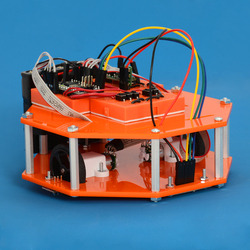
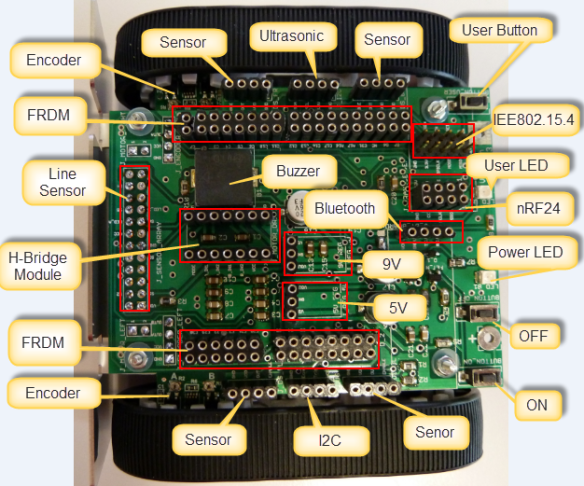
Forum user Erich created a custom Zumo Robot Chassis PCB to use with our Zumo chassis kit. The board is designed to accept a large number of plug-in modules, such as a DRV8835 dual motor driver carrier, encoders, and voltage regulators. Sensors that can be mounted on the robot include a Zumo reflectance sensor array, some distance sensors, and an ultrasonic sensor, and it also supports several wireless communication modules. Instead of an Arduino, it uses a Freescale FRDM-KL25Z as the microcontroller board.
 |
You can follow his robot’s progression by visiting these forum posts:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled.
Mini Maestro 24 controls a parallel LCD
In this video, forum user Dev255 controls a standard (HD44780 parallel interface) 4×20 LCD display with a Mini Maestro 24-Channel USB Servo Controller and displays the value of the potentiometer (converted to a percentage) on the screen. You can find out more about his project and see his Maestro script in his forum post.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7402
Wirelessly-controlled robot with PIC and nRF24L01+
In this video, Amjad Al-Ahdal demonstrates his wirelessly-controlled robot with multiple modes that he programmed in C. The robot contains a PIC18F2455 microcontroller, an nRF24L01+ transceiver, a SN754410 motor driver IC, a Pololu wheel and encoder set, and two 100:1 Micro Metal Gearmotors. Its controller has a homemade keypad, another transceiver, a 9DOF sensor, and a serial 16×2 LCD screen.
Featured link: http://www.youtube.com/watch?v=Z1oRE5TTVFU
Adding audio to an m3pi with a SpeakJet
In this video, Jerry Guttman shows off his Pololu m3pi Robot combined with the SpeakJet Phraselator Speech Development System. The SpeakJet chip was developed by Magnevation and allows for speech synthesis and robot sound effects.
Featured link: http://www.youtube.com/watch?v=dYWQB12Ibsw


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









